Pytorch入门下 —— 其他
本节内容参照小土堆的pytorch入门视频教程。
现有模型使用和修改
pytorch框架提供了很多现有模型,其中torchvision.models包中有很多关于视觉(图像)领域的模型,如下图:

下面以VGG16为例将讲解如何使用以及更改现有模型:
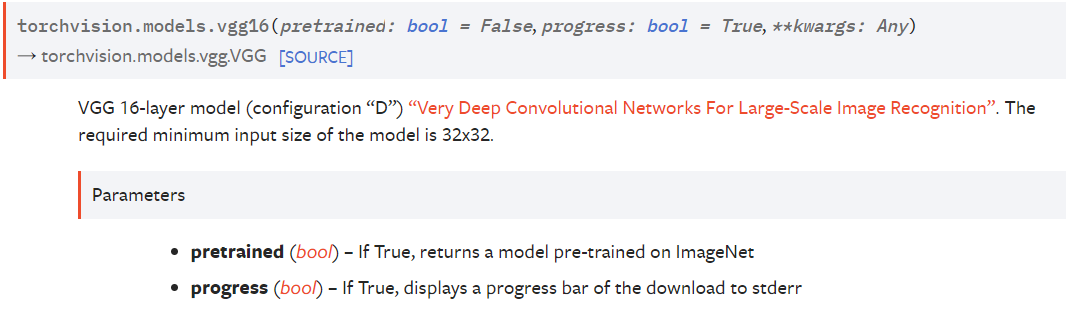
pretrained为True,返回在ImageNet上预训练过的模型;pregress为True在下载模型时会通过标准错误流输出进度条。
创建如下脚本并运行:
from torchvision import models
# 创建预训练过的模型,并输出进度
vgg16_pretrained = models.vgg16(pretrained=True, progress=True)
# 创建没训练过的模型,不输出进度
vgg16 = models.vgg16(pretrained=False, progress=False)
# 控制台输出模型结构
print(vgg16_pretrained)
控制台输出如下:
Downloading: "https://download.pytorch.org/models/vgg16-397923af.pth" to C:\Users\winlsr/.cache\torch\hub\checkpoints\vgg16-397923af.pth
100.0%
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)
如上输出中的的VGG表示模型的class名,features是VGG含有的一个Sequential组件(Module),avgpool是AdaptiveAvgPool2d组件,classifier同样为Sequential组件。
创建如下脚本并运行:
from torchvision import models
from torch import nn
# 创建预训练过的模型,并输出进度
vgg16_pretrained = models.vgg16(pretrained=True, progress=True)
# 创建没训练过的模型,不输出进度
vgg16 = models.vgg16(pretrained=False, progress=False)
# 给vgg添加一个线性Module(层)
vgg16_pretrained.add_module("linear", nn.Linear(1000, 10))
# 控制台输出模型结构
print(vgg16_pretrained)
输出如下:
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
(linear): Linear(in_features=1000, out_features=10, bias=True) # 添加成功
)
创建如下脚本并运行:
from torchvision import models
from torch import nn
# 创建预训练过的模型,并输出进度
vgg16_pretrained = models.vgg16(pretrained=True, progress=True)
# 创建没训练过的模型,不输出进度
vgg16 = models.vgg16(pretrained=False, progress=False)
# 删除 features 组件
del vgg16_pretrained.features
# 在 classifier 组件中添加组件
vgg16_pretrained.classifier.add_module("7", nn.Linear(1000, 10))
# 修改 classifier 组件中的第1个组件为 softmax(0开始)
vgg16_pretrained.classifier[1] = nn.Softmax()
# 控制台输出模型结构
print(vgg16_pretrained)
输出如下:
VGG(
# 删除features成功
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
# 修改为softmax成功
(1): Softmax(dim=None)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
# 添加成功
(7): Linear(in_features=1000, out_features=10, bias=True)
)
)
模型的保存与读取
pytorch中有两种模型保存和读取方式:
执行如下脚本:
from _07_cifar10_model.cifar10_model import MyModel
import torch
cifar10_model = MyModel()
# 方式1:保存 模型 + 参数
torch.save(cifar10_model, "cifar10_model.pth")
# 方式2:只保存 参数(官方推荐)
torch.save(cifar10_model.state_dict(), "cifar10_model_state_dict.pth")
执行成功后,脚本文件所在目录会生成:cifar10_model.pth、cifar10_model_state_dict.pth两个文件。
恢复方式1保存的模型:
import torch
# 方式1
cifar10_model = torch.load("cifar10_model.pth")
print(cifar10_model)
输出如下:
MyModel(
(model): Sequential(
(0): Conv2d(3, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(2): Conv2d(32, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Flatten(start_dim=1, end_dim=-1)
(7): Linear(in_features=1024, out_features=64, bias=True)
(8): Linear(in_features=64, out_features=10, bias=True)
)
)
恢复方式2保存的模型(官方推荐):
import torch
from _07_cifar10_model.cifar10_model import MyModel
# 方式2(官方推荐)
cifar10_model = MyModel()
cifar10_model.load_state_dict(torch.load("cifar10_model_state_dict.pth"))
print(cifar10_model)
输出如下:
MyModel(
(model): Sequential(
(0): Conv2d(3, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(2): Conv2d(32, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Flatten(start_dim=1, end_dim=-1)
(7): Linear(in_features=1024, out_features=64, bias=True)
(8): Linear(in_features=64, out_features=10, bias=True)
)
)
模型的完整训练套路
前面我们虽然搭建了在CIFAR10数据集上的分类模型,但是我们并没有对模型进行完整的训练。下面会对我们的模型进行一个完整的训练。训练代码如下:
import time
from torch.utils import tensorboard
from torch.utils.data import DataLoader
from _07_cifar10_model.cifar10_model import MyModel
import torchvision
import torch.nn
if __name__ == "__main__":
start_time = time.time()
# 准备训练数据集和测试数据集
transform = torchvision.transforms.Compose({
torchvision.transforms.ToTensor()
})
train_data = torchvision.datasets.CIFAR10("./dataset", train=True,
transform=transform,
download=True)
test_data = torchvision.datasets.CIFAR10("./dataset", train=False,
transform=transform,
download=True)
train_data_len = len(train_data)
test_data_len = len(test_data)
print("训练集的长度: {}".format(train_data_len))
print("测试集的长度: {}".format(test_data_len))
# 创建训练集和测试集的dataloader
train_dataloader = DataLoader(dataset=train_data, batch_size=64,
shuffle=True,
num_workers=16)
test_dataloader = DataLoader(dataset=test_data, batch_size=64,
shuffle=True,
num_workers=16)
# 创建网络
cifar10_model = MyModel()
# 创建损失函数
loss_func = torch.nn.CrossEntropyLoss()
# 创建优化器
# 学习率,科学计数的形式方便改动
learning_rate = 1e-2
optimizer = torch.optim.SGD(cifar10_model.parameters(), lr=learning_rate)
# 训练次数
total_train_step = 0
# 训练轮次
epoch = 20
# 创建 tensorboard SummaryWriter
writer = tensorboard.SummaryWriter("logs")
for i in range(epoch):
print("----------第 {} 轮训练开始-----------".format(i))
# 模型进入训练模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.train()
for data in train_dataloader:
images, targets = data
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
# 清空上一轮计算的梯度
optimizer.zero_grad()
# 反向传播计算梯度
loss.backward()
# 优化器优化参数(执行梯度下降)
optimizer.step()
total_train_step += 1
writer.add_scalar("train/Loss", loss.item(), total_train_step)
if total_train_step % 100 == 0:
print("训练次数: {}, Loss: {}".
format(total_train_step, loss.item()))
total_test_loss = 0.0
total_accuracy = 0.0
# 每轮 epoch 后计算模型在测试集上的loss表现
# 测试时无需计算梯度,可加快计算速度
# 模型进入验证(测试)模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.eval()
with torch.no_grad():
for data in test_dataloader:
images, targets = data
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
total_test_loss += loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy
print("测试准确率:{}".format(total_accuracy/test_data_len))
writer.add_scalar("test/Loss", total_test_loss, i)
writer.add_scalar("test/accuracy", total_accuracy/test_data_len, i)
# 保存每轮训练后的模型
torch.save(cifar10_model.state_dict(),
"cifar10_model_state_dict_{}_epoch.pth".format(i))
writer.close()
end_time = time.time()
print("耗时:{}".format(end_time - start_time))
如上代码中调用模型的train()和eval()方法主要是对模型中的Dropout、BatchNorm等Module有用(如果存在),官方解释如下:


tensorboard可视化结果如下:

利用GPU训练
没有GPU的同学可以想办法使用google colab,他提供了免费的GPU使用时长,使用起来和jupyter notebook很像。
利用GPU训练很简单:
方式一:.cuda()
只需要对 网络模型、数据(输入、标注)、损失函数调用.cuda()方法:
import time
from torch.utils import tensorboard
from torch.utils.data import DataLoader
from _07_cifar10_model.cifar10_model import MyModel
import torchvision
import torch.nn
if __name__ == "__main__":
start_time = time.time()
# 准备训练数据集和测试数据集
transform = torchvision.transforms.Compose({
torchvision.transforms.ToTensor()
})
train_data = torchvision.datasets.CIFAR10("./dataset", train=True,
transform=transform,
download=True)
test_data = torchvision.datasets.CIFAR10("./dataset", train=False,
transform=transform,
download=True)
train_data_len = len(train_data)
test_data_len = len(test_data)
print("训练集的长度: {}".format(train_data_len))
print("测试集的长度: {}".format(test_data_len))
# 创建训练集和测试集的dataloader
train_dataloader = DataLoader(dataset=train_data, batch_size=64,
shuffle=True,
num_workers=16)
test_dataloader = DataLoader(dataset=test_data, batch_size=64,
shuffle=True,
num_workers=16)
# 创建网络
cifar10_model = MyModel()
if torch.cuda.is_available():
cifar10_model = cifar10_model.cuda()
# 创建损失函数
loss_func = torch.nn.CrossEntropyLoss()
if torch.cuda.is_available():
loss_func = loss_func.cuda()
# 创建优化器
# 学习率,科学计数的形式方便改动
learning_rate = 1e-2
optimizer = torch.optim.SGD(cifar10_model.parameters(), lr=learning_rate)
# 训练次数
total_train_step = 0
# 训练轮次
epoch = 20
# 创建 tensorboard SummaryWriter
writer = tensorboard.SummaryWriter("logs")
for i in range(epoch):
print("----------第 {} 轮训练开始-----------".format(i))
# 模型进入训练模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.train()
for data in train_dataloader:
images, targets = data
if torch.cuda.is_available():
images = images.cuda()
targets = targets.cuda()
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
# 清空上一轮计算的梯度
optimizer.zero_grad()
# 反向传播计算梯度
loss.backward()
# 优化器优化参数(执行梯度下降)
optimizer.step()
total_train_step += 1
writer.add_scalar("train/Loss", loss.item(), total_train_step)
if total_train_step % 100 == 0:
print("训练次数: {}, Loss: {}".
format(total_train_step, loss.item()))
total_test_loss = 0.0
total_accuracy = 0.0
# 每轮 epoch 后计算模型在测试集上的loss表现
# 测试时无需计算梯度,可加快计算速度
# 模型进入验证(测试)模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.eval()
with torch.no_grad():
for data in test_dataloader:
images, targets = data
if torch.cuda.is_available():
images = images.cuda()
targets = targets.cuda()
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
total_test_loss += loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy
print("测试准确率:{}".format(total_accuracy/test_data_len))
writer.add_scalar("test/Loss", total_test_loss, i)
writer.add_scalar("test/accuracy", total_accuracy/test_data_len, i)
# 保存每轮训练后的模型
torch.save(cifar10_model.state_dict(),
"cifar10_model_state_dict_{}_epoch.pth".format(i))
writer.close()
end_time = time.time()
print("耗时:{}".format(end_time - start_time))
方式二:.to()
对 网络模型、数据(输入、标注)、损失函数调用.to()方法,方法中传入torch.device()对象。这种方式的好处在于不但可以使用GPU,还可以在有多块GPU时指定使用某块GPU。
如下:
# cpu
CPU_device = torch.device("cpu")
# gpu 只有一块显卡无需指明使用第几块
GPU_device = torch.device("cuda")
# 第0块 gpu
GPU_0_device = torch.device("cuda:0")
完整代码如下:
import time
from torch.utils import tensorboard
from torch.utils.data import DataLoader
from _07_cifar10_model.cifar10_model import MyModel
import torchvision
import torch.nn
if __name__ == "__main__":
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
start_time = time.time()
# 准备训练数据集和测试数据集
transform = torchvision.transforms.Compose({
torchvision.transforms.ToTensor()
})
train_data = torchvision.datasets.CIFAR10("./dataset", train=True,
transform=transform,
download=True)
test_data = torchvision.datasets.CIFAR10("./dataset", train=False,
transform=transform,
download=True)
train_data_len = len(train_data)
test_data_len = len(test_data)
print("训练集的长度: {}".format(train_data_len))
print("测试集的长度: {}".format(test_data_len))
# 创建训练集和测试集的dataloader
train_dataloader = DataLoader(dataset=train_data, batch_size=64,
shuffle=True,
num_workers=16)
test_dataloader = DataLoader(dataset=test_data, batch_size=64,
shuffle=True,
num_workers=16)
# 创建网络
cifar10_model = MyModel()
cifar10_model = cifar10_model.to(device)
# if torch.cuda.is_available():
# cifar10_model = cifar10_model.cuda()
# 创建损失函数
loss_func = torch.nn.CrossEntropyLoss()
loss_func = loss_func.to(device)
# if torch.cuda.is_available():
# loss_func = loss_func.cuda()
# 创建优化器
# 学习率,科学计数的形式方便改动
learning_rate = 1e-2
optimizer = torch.optim.SGD(cifar10_model.parameters(), lr=learning_rate)
# 训练次数
total_train_step = 0
# 训练轮次
epoch = 20
# 创建 tensorboard SummaryWriter
writer = tensorboard.SummaryWriter("logs")
for i in range(epoch):
print("----------第 {} 轮训练开始-----------".format(i))
# 模型进入训练模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.train()
for data in train_dataloader:
images, targets = data
images = images.to(device)
targets = targets.to(device)
# if torch.cuda.is_available():
# images = images.cuda()
# targets = targets.cuda()
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
# 清空上一轮计算的梯度
optimizer.zero_grad()
# 反向传播计算梯度
loss.backward()
# 优化器优化参数(执行梯度下降)
optimizer.step()
total_train_step += 1
writer.add_scalar("train/Loss", loss.item(), total_train_step)
if total_train_step % 100 == 0:
print("训练次数: {}, Loss: {}".
format(total_train_step, loss.item()))
total_test_loss = 0.0
total_accuracy = 0.0
# 每轮 epoch 后计算模型在测试集上的loss表现
# 测试时无需计算梯度,可加快计算速度
# 模型进入验证(测试)模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.eval()
with torch.no_grad():
for data in test_dataloader:
images, targets = data
images = images.to(device)
targets = targets.to(device)
# if torch.cuda.is_available():
# images = images.cuda()
# targets = targets.cuda()
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
total_test_loss += loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy
print("测试准确率:{}".format(total_accuracy/test_data_len))
writer.add_scalar("test/Loss", total_test_loss, i)
writer.add_scalar("test/accuracy", total_accuracy/test_data_len, i)
# 保存每轮训练后的模型
torch.save(cifar10_model.state_dict(),
"cifar10_model_state_dict_{}_epoch.pth".format(i))
writer.close()
end_time = time.time()
print("耗时:{}".format(end_time - start_time))
模型验证
前面的小节中,我们已经将模型训练好了,且保存了每轮训练后的模型参数。现在我们选择一个在测试集上表现最好的模型进行恢复,然后在网上随便找些图片,看我们的模型能否分类正确。根据tensorboard的显示,表现最好的模型是在第18轮训练后的模型,能达到65%左右的正确率。预测图片如下:


根据CIFAR10数据集中定义,dog的target为5,airplane的target为0:

预测代码如下:
import torch
from PIL import Image
import torchvision
from _07_cifar10_model.cifar10_model import MyModel
dog_img_path = "dog.png"
airplane_img_path = "airplane.png"
dog_img_PIL = Image.open(dog_img_path)
airplane_img_PIL = Image.open(airplane_img_path)
# 将4通道RGBA转成3通道RGB
dog_img_PIL = dog_img_PIL.convert("RGB")
airplane_img_PIL = airplane_img_PIL.convert("RGB")
transform = torchvision.transforms.Compose([
torchvision.transforms.Resize((32, 32)),
torchvision.transforms.ToTensor()
])
dog_img_tensor = transform(dog_img_PIL)
airplane_img_tensor = transform(airplane_img_PIL)
# print(dog_img_tensor.shape)
dog_img_tensor = torch.reshape(dog_img_tensor, (-1, 3, 32, 32))
airplane_img_tensor = torch.reshape(airplane_img_tensor, (1, 3, 32, 32))
cifar10_model = MyModel()
cifar10_model.load_state_dict(torch.load(
"../_10_train_model/cifar10_model_state_dict_18_epoch.pth"))
cifar10_model.eval()
with torch.no_grad():
output = cifar10_model(dog_img_tensor)
print(output.argmax(1))
output = cifar10_model(airplane_img_tensor)
print(output.argmax(1))
输出如下:
tensor([7]) # 预测错误
tensor([0]) # 预测正确
Pytorch入门下 —— 其他的更多相关文章
- Pytorch入门随手记
Pytorch入门随手记 什么是Pytorch? Pytorch是Torch到Python上的移植(Torch原本是用Lua语言编写的) 是一个动态的过程,数据和图是一起建立的. tensor.dot ...
- pytorch入门2.2构建回归模型初体验(开始训练)
pytorch入门2.x构建回归模型系列: pytorch入门2.0构建回归模型初体验(数据生成) pytorch入门2.1构建回归模型初体验(模型构建) pytorch入门2.2构建回归模型初体验( ...
- pytorch入门2.1构建回归模型初体验(模型构建)
pytorch入门2.x构建回归模型系列: pytorch入门2.0构建回归模型初体验(数据生成) pytorch入门2.1构建回归模型初体验(模型构建) pytorch入门2.2构建回归模型初体验( ...
- Pytorch入门——手把手教你MNIST手写数字识别
MNIST手写数字识别教程 要开始带组内的小朋友了,特意出一个Pytorch教程来指导一下 [!] 这里是实战教程,默认读者已经学会了部分深度学习原理,若有不懂的地方可以先停下来查查资料 目录 MNI ...
- Pytorch入门上 —— Dataset、Tensorboard、Transforms、Dataloader
本节内容参照小土堆的pytorch入门视频教程.学习时建议多读源码,通过源码中的注释可以快速弄清楚类或函数的作用以及输入输出类型. Dataset 借用Dataset可以快速访问深度学习需要的数据,例 ...
- Pytorch入门中 —— 搭建网络模型
本节内容参照小土堆的pytorch入门视频教程,主要通过查询文档的方式讲解如何搭建卷积神经网络.学习时要学会查询文档,这样会比直接搜索良莠不齐的博客更快.更可靠.讲解的内容主要是pytorch核心包中 ...
- [pytorch] Pytorch入门
Pytorch入门 简单容易上手,感觉比keras好理解多了,和mxnet很像(似乎mxnet有点借鉴pytorch),记一记. 直接从例子开始学,基础知识咱已经看了很多论文了... import t ...
- pytorch 入门指南
两类深度学习框架的优缺点 动态图(PyTorch) 计算图的进行与代码的运行时同时进行的. 静态图(Tensorflow <2.0) 自建命名体系 自建时序控制 难以介入 使用深度学习框架的优点 ...
- 超简单!pytorch入门教程(五):训练和测试CNN
我们按照超简单!pytorch入门教程(四):准备图片数据集准备好了图片数据以后,就来训练一下识别这10类图片的cnn神经网络吧. 按照超简单!pytorch入门教程(三):构造一个小型CNN构建好一 ...
随机推荐
- [atARC123F]Insert Addition
前置知识 下面,先来介绍一下Stern-Brocot Tree的结构: 其是一棵满二叉树,每一个节点都是一个最简分数,其中根为$\frac{1}{1}$ 假设前$i$层的中序遍历分数依次为$\frac ...
- [gym101981F]Frank
在本题中,每一步是独立的,因此即可以看作从$s$移动到$t$的期望步数(对于每一对$s$和$t$都求出答案) 令$f_{i,j}$表示当$s=i$且$t=j$时的答案,则有$f_{i,j}=\begi ...
- [bzoj5462]新家
先离线,将询问按照时间排序,维护商店出现和消失 对于每一个询问,先二分枚举答案,假设是ans, 即要求对于区间[l-ans,l+ans],商店的种类数是k(l是询问的位置) (当然需要先将所有位置离散 ...
- 将vue文档下载到本地预览
1下载:https://github.com/vuejs/cn.vuejs.org 到本地 2. npm install npm start # 开发服务器地址为 http://localhost ...
- 解决ip和域名都能够ping通但是启动nginx无法访问网页的问题
解决思路 最近双11逛西部数码的官网看看有没有什么服务器优惠的时候,发现了可以申请一个一块钱用一整年的SSL证书,立马心动下单了,想想俺也可以用https装装X了哈哈 不过在部署完证书,并调整ngin ...
- python3使用concurrent执行多进程任务
技术背景 随着计算机技术的发展,诸如GPU和超算平台等越来越发达,这些技术的本质其实并没有带来算法上的革新,之所以能够提升计算的速度和规模,很大程度上是因为分布式和并行计算的优势.这里我们介绍一个简单 ...
- logname
logname命令用来显示用户名称. 语法 logname(选项) 选项 --help:在线帮助: --vesion:显示版本信息.
- 如何利用官方SDK文件来辅助开发
如何利用官方SDK文件来辅助开发 1.首先要先知道什么是SDK? SDK或者SDK包指的是,半导体厂商针对自己研发的芯片,同步推出的一个软件开发工具包. 它可以简单的为某个程序设计语言提供应用程序接口 ...
- 用原生CSS编写动态字体
HTML部分: <!DOCTYPE html> <html> <head> <meta charset="utf-8"> <t ...
- Yarn 生产环境核心参数配置案例
目录 Yarn 生产环境核心参数配置案例 需求 修改yarn-site.xml配置 分发 重启集群 执行WordCount程序 Yarn 生产环境核心参数配置案例 调整下列参数之前要拍摄Linux快照 ...