Isaac Sim 机器人仿真器介绍、安装与 Docker [1]
前言与参考
此文书写于: January 6, 2023, 更新于 January 6, 2023 ;可能会随着时间的变化 此教程会有过时概念哦
Isaac Sim 相关参考链接:
- 官方文档地址
- 官方docker image 镜像地址
- 官方讨论 论坛链接,建议没啥事就可以逛逛,看问题和回答也是件很有意思的事
本篇主要是根据参考1,相当部分文字直接翻译而来
Test computer and System:
- Desktop setting: i9-12900KF, GPU 3090, CUDA 11.3
- System setting: Ubuntu 20.04, ROS noetic (Python 3.8)
Introduction 介绍
Isaac Sim是什么勒?是一个针对于机器人的仿真器;之前我有写过一系列的CARLA仿真器教程,而这里为什么要新开仿真器呢?主要就是CARLA的定位是针对于室外无人驾驶的,而Isaac Sim更多针对于室内的机器人系列,包括AGV, 车上带个机械臂,其实更靠近 CoppeliaSim VREP 的使用方向。
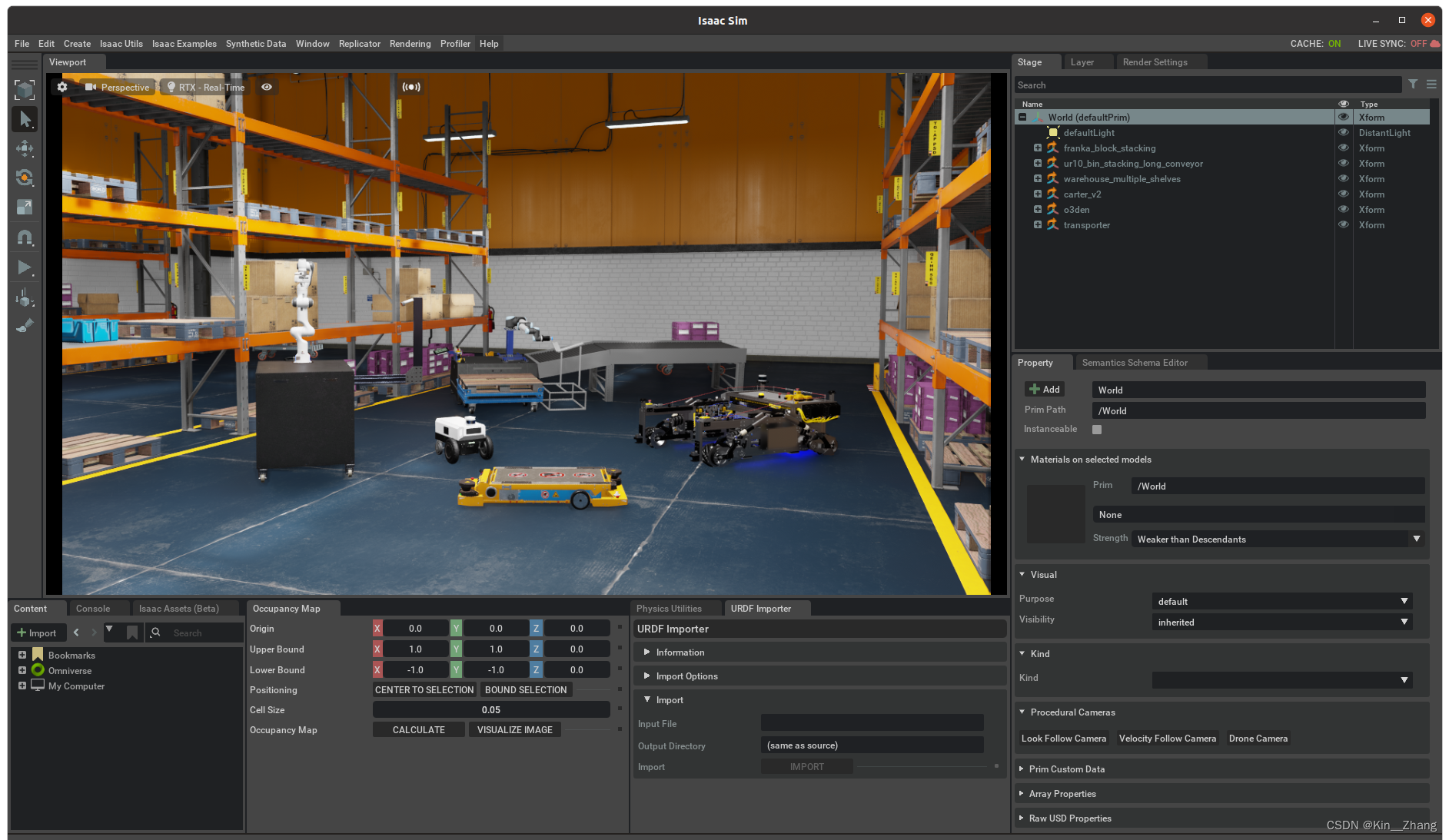
官方截图
既然介绍到了仿真器,那一口气都说一下好了 【我和小伙伴已知的】:
Some simulators for robotics or autonomous driving scenarios
- CARLA focus on autonomous driving 无人驾驶场景;http://carla.org/
- CoppeliaSim focuses on robotics 机器人场景;https://www.coppeliarobotics.com/ 【usually on Robotic Arms 机械臂常用】
- Isaac Sim focuses on robotics 机器人场景;https://developer.nvidia.com/isaac-sim
- Issac Gym is the same as the above one but has more RL setting here; 同上,RL环境更多;https://developer.nvidia.com/isaac-gym
- RaiSim focuses on robotics 机器人场景, official introduction: a cross-platform multi-body physics engine for robotics and AI;https://raisim.com/
Isaac Sim背靠NVIDIA 英伟达!所以对比与coppeliasim 它对于传感器和世界的仿真更更为真实一点【我没非常仔细对比过 说错了不怪我 纯肉眼看的感觉】,然后是对于GPU的支持,只要GPU到位 仿真收数据速度什么的都应该可以很快
官方介绍翻译:
Isaac Sim 具有构建虚拟机器人世界和实验的基本功能。它为研究人员和从业者提供了创建稳健、物理上准确的模拟和合成数据集所需的工具和工作流程。Isaac Sim 通过 ROS/ROS2 支持导航和操作应用程序。它模拟来自 RGB-D、激光雷达和 IMU 等传感器的传感器数据,用于各种计算机视觉技术,例如域随机化、地面实况标记、分割和边界框。
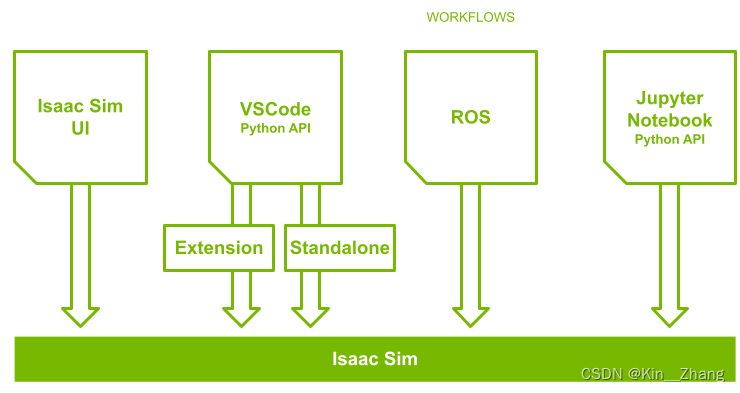
开发工作流程图
从图里能看出来 整个workflow,UI、Python API、ROS等 均可以通信
看官方文档 应该是熟悉一下UI 比如添加物品之类的
本机环境
Install 安装
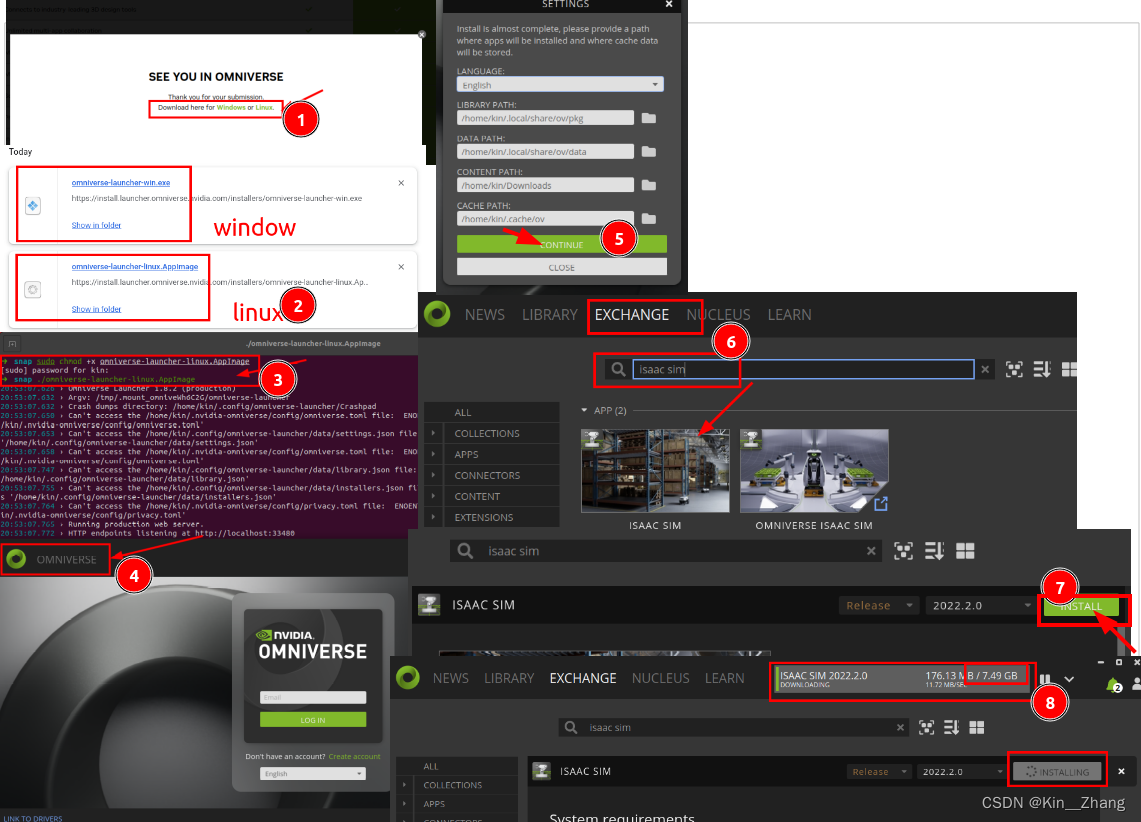
点击Download,然后填写信息后就可以选择下载Window or Linux了,安装完成后进入Running 运行部分;前提提要 安装显卡及显卡驱动,详情点击此文字 见博客
2. Workstation Installation - Omniverse Robotics documentation
此为Ubuntu示例,WIndow内置有nvidia官方拍的视频
下载 Download the Omniverse Launcher.
安装运行 Install Omniverse Launcher
sudo chmod +x omniverse-launcher-linux.AppImage
./omniverse-launcher-linux.AppImage
下载 Isaac Sim;如图 【全UI操作】 下载 Isaac Sim 需要 7.49G
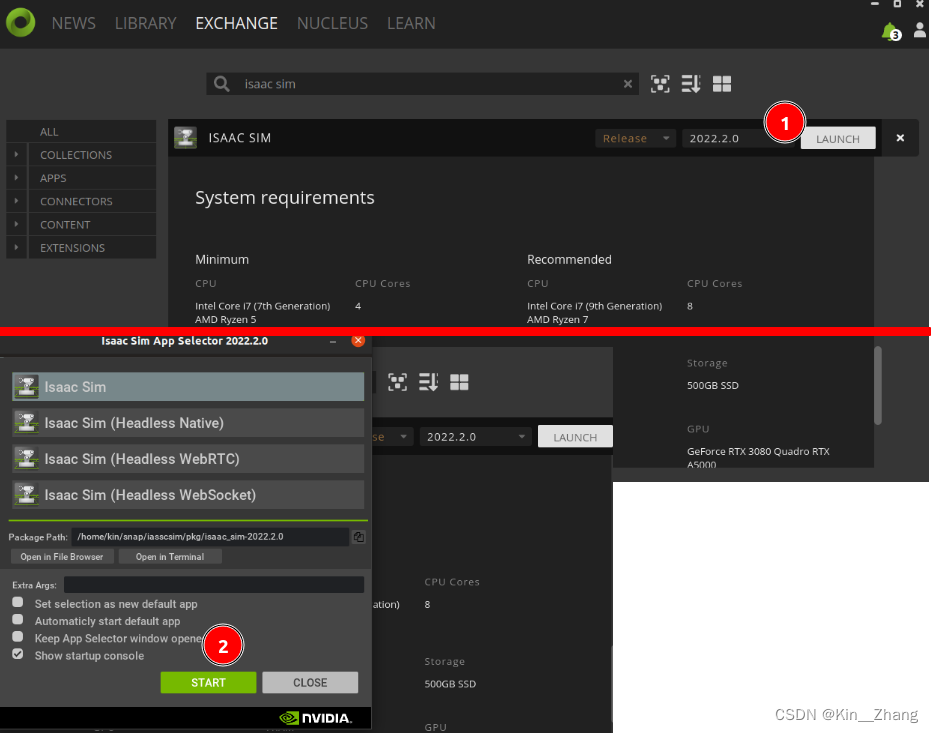
Running 运行
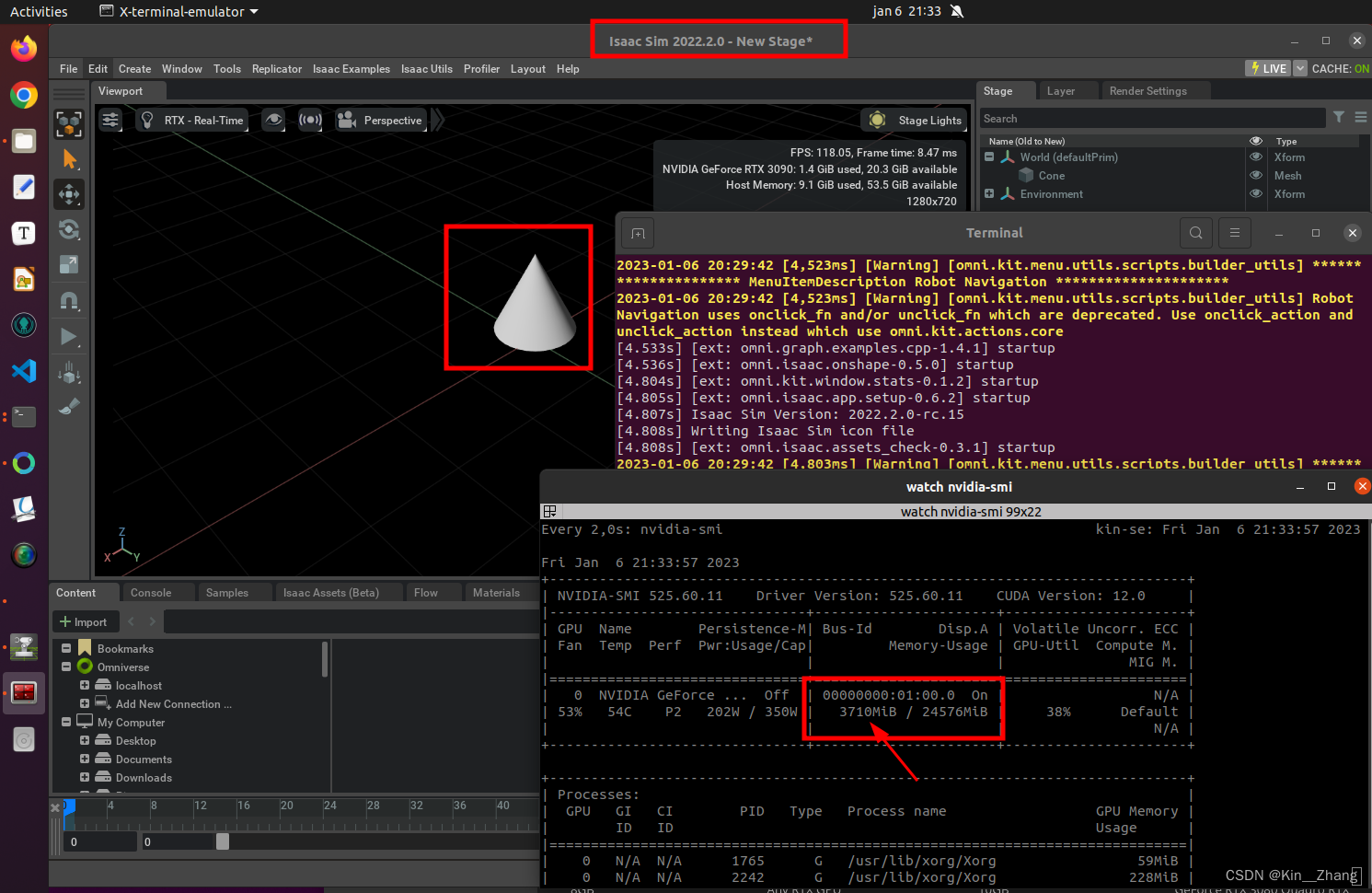
如图 安装完成后会出现 isaac sim 然后点一下launch,然后再按个start;后续可以从LIBRARY处点击launch
右键随便加了一个圆锥 顺便截图有指明显存耗的情况【显示器是1080p的】
Docker及云端
Install 安装
3. Container Installation - Omniverse Robotics documentation
Docker 安装见 详情点击此进入对应博客文章
如下 需要像dockerhub一下注册账号等
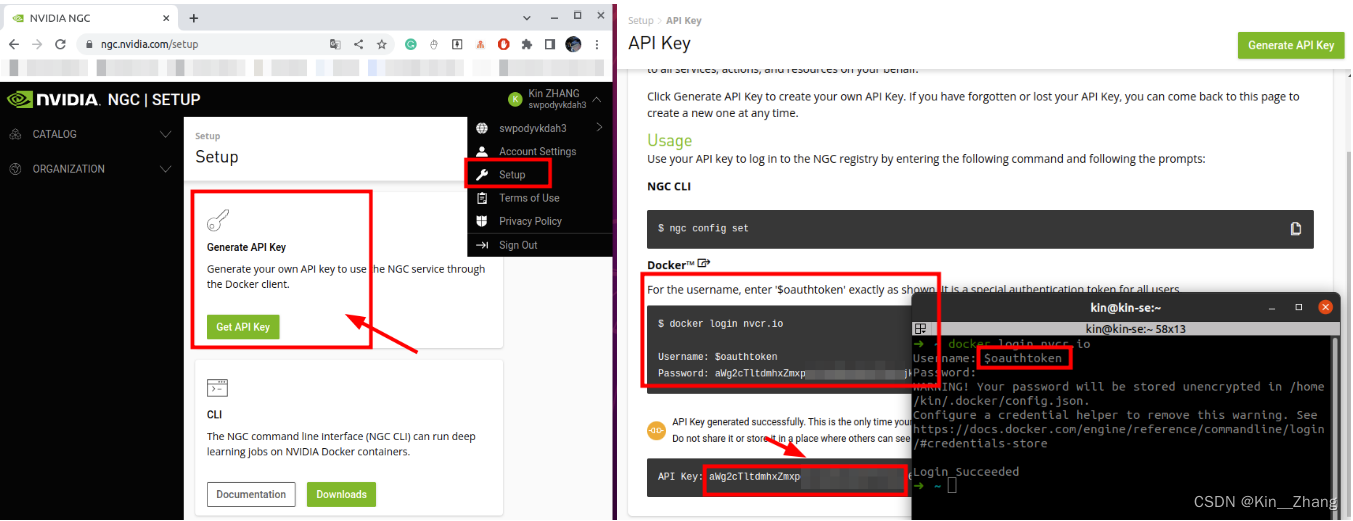
docker login nvcr.io
docker pull nvcr.io/nvidia/isaac-sim:2022.2.0
然后呢 需要用 Omniverse Streaming Client 来进行窗口展示
注意如果是服务器!!大部分服务器为了安全着想 只会开几个固定端口进行链接,所以一定要确保自己以下端口打开并可以连接:
Should the host be located on the infrastructure of a third-party Cloud provider,
it may additionally be required that the following ports be opened, and that
firewall rules allow traffic inbound and outbound traffic:
TCP: 47995 to 48012
TCP: 49000 to 49007
TCP: 49100
UDP: 47995 to 48012
UDP: 49000 to 49007
更多可见 官方给的提示,点击此跳转官方网页
Running 运行
因为手头没有可用服务器,所以就展示一下Docker的用法,主要是--net=host后一切都好办
用image开一个container
docker run --name isaac-sim --entrypoint bash -it --gpus all -e "ACCEPT_EULA=Y" --rm --network=host \
-v /usr/share/vulkan/icd.d/nvidia_icd.json:/etc/vulkan/icd.d/nvidia_icd.json \
-v /usr/share/vulkan/implicit_layer.d/nvidia_layers.json:/etc/vulkan/implicit_layer.d/nvidia_layers.json \
-v /usr/share/glvnd/egl_vendor.d/10_nvidia.json:/usr/share/glvnd/egl_vendor.d/10_nvidia.json \
-v ~/docker/isaac-sim/cache/ov:/root/.cache/ov:rw \
-v ~/docker/isaac-sim/cache/pip:/root/.cache/pip:rw \
-v ~/docker/isaac-sim/cache/glcache:/root/.cache/nvidia/GLCache:rw \
-v ~/docker/isaac-sim/cache/computecache:/root/.nv/ComputeCache:rw \
-v ~/docker/isaac-sim/logs:/root/.nvidia-omniverse/logs:rw \
-v ~/docker/isaac-sim/config:/root/.nvidia-omniverse/config:rw \
-v ~/docker/isaac-sim/data:/root/.local/share/ov/data:rw \
-v ~/docker/isaac-sim/documents:/root/Documents:rw \
nvcr.io/nvidia/isaac-sim:2022.2.0
唯一一个需要注意的点【因为官方默认的不适配我的环境 上述已经是变了的】 找到自己
nvidia_icd.json文件地址;可能地址如下:# 官方默认
-v /etc/vulkan/icd.d/nvidia_icd.json:/etc/vulkan/icd.d/nvidia_icd.json \
-v /etc/vulkan/implicit_layer.d/nvidia_layers.json:/etc/vulkan/implicit_layer.d/nvidia_layers.json \ # 我的环境
-v /usr/share/vulkan/icd.d/nvidia_icd.json:/etc/vulkan/icd.d/nvidia_icd.json \
-v /usr/share/vulkan/implicit_layer.d/nvidia_layers.json:/etc/vulkan/implicit_layer.d/nvidia_layers.json \
在container运行一行
# inside container
./runheadless.native.sh
请遵循官方的手册 等到终端打印出 再进行下面的窗口展示 【第一次一般慢一点 官方文字:It may take a few minutes for Isaac Sim to be completely loaded.】
Isaac Sim Headless Native App is loaded.
# 实际上我显示的是这个
[22.315s] app ready

用 Omniverse Streaming Client 来进行窗口展示
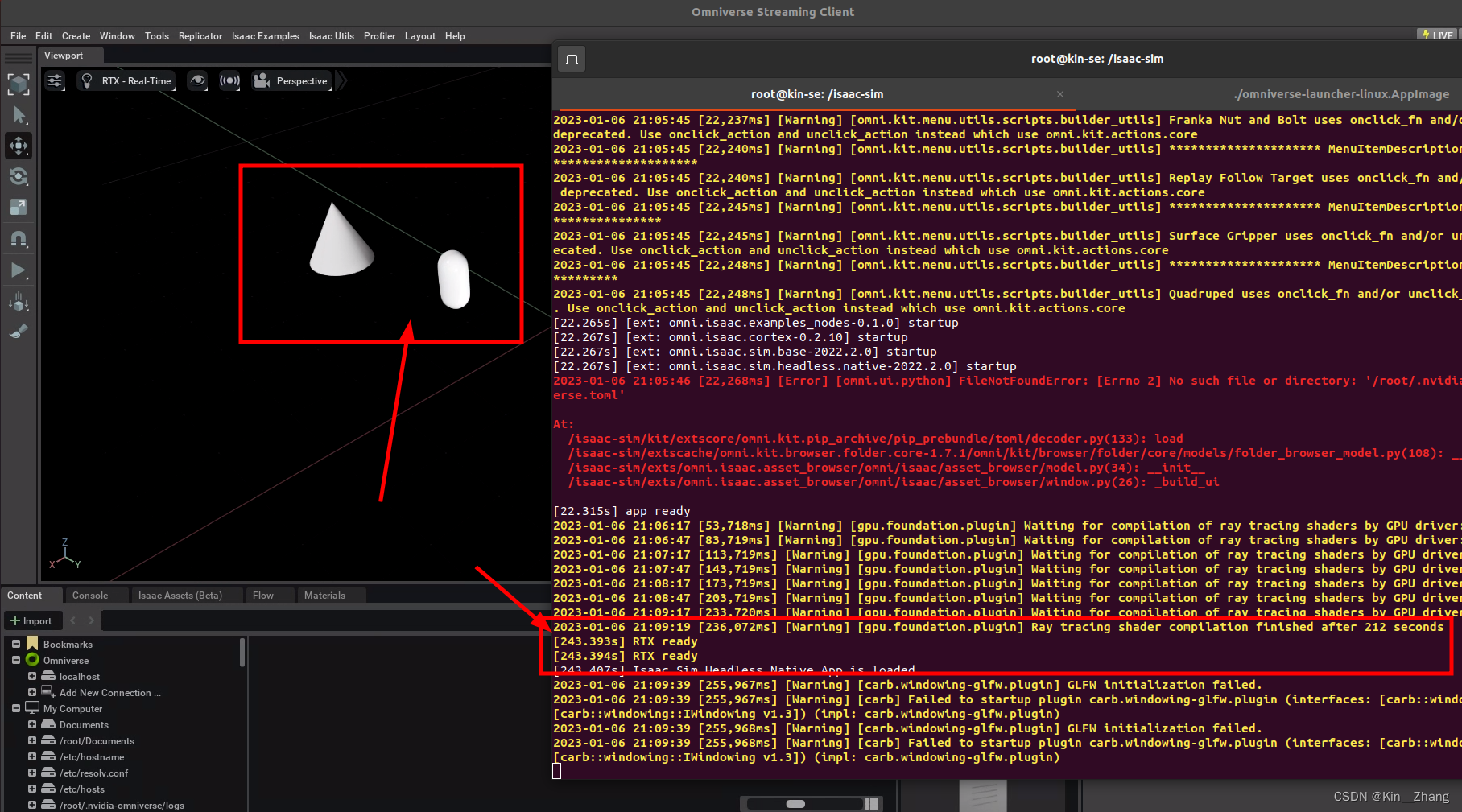
然后注意这一步 一开始可能显示的是RTX Loading 就是还在编译 ray tracing shaders,这一点官方也有提示 第一次的时候 一般需要几分钟,比如我的配置 耗时了212s去完成这个显示
The first time loading Isaac Sim will take a while for the shaders to be cached. Subsequent runs of Isaac Sim with be quick once the shaders are cached and the cache is mounted when the container runs.
在如右RTX ready后 随手加了create 两个mesh shape
最后在docker内 窗口好像有点没法变 这一点好像得设置一下 restart 具体见官方链接操作吧
# Default value is set to `1.0`, and can be adjusted for best results:
--/app/window/dpiScaleOverride=1.5
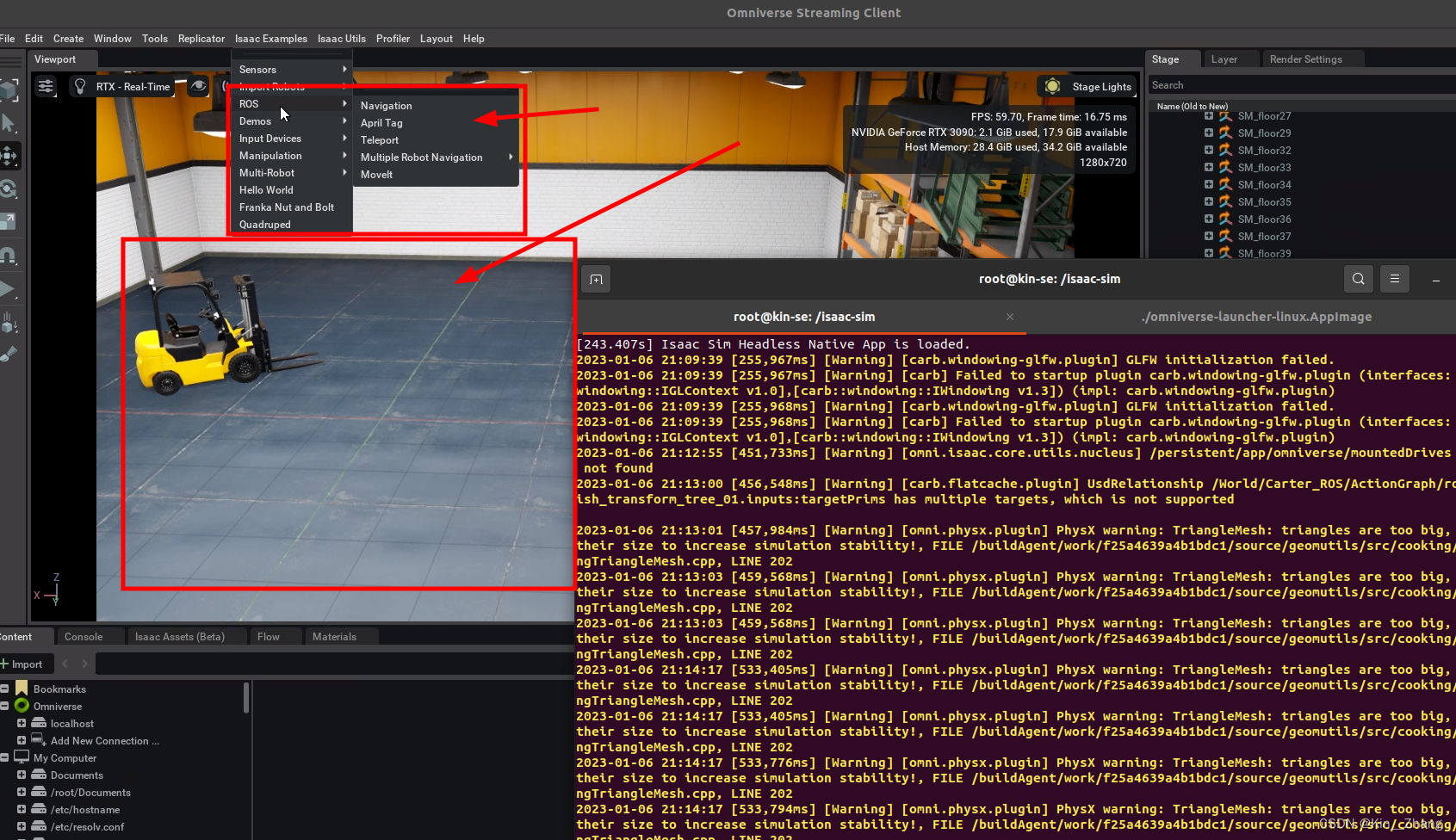
还有docker运行里 随手开了一个example的场景也还行:
总结
以上 为 Isaac 相关介绍啦~ 包括一系列的安装 后续可能再来一个放个小机器人 搞几个传感器 开收数据 差不多就结束了 API可以对着官方文档看就行
赠人点赞 手有余香 ;正向回馈 才能更好开放记录 hhh
Isaac Sim 机器人仿真器介绍、安装与 Docker [1]的更多相关文章
- Rancher介绍安装以及对docker的管理
原文:Rancher介绍安装以及对docker的管理 一.简介 Rancher是一个开源的企业级全栈化容器部署及管理平台.Rancher为容器提供一揽子基础架构服务:CNI兼容的网络服务.存储服务.主 ...
- 微服务分布式电商项目学习笔记(三)---- docker介绍安装以及使用docker安装软件(2020/7/10)
其实在介绍docker的使用和安装之前应该还要介绍虚拟机的安装与配置,以及虚拟网络的配置,但是我使用的是vmware,而视频课使用的是vagrant,这一块我简看的,因此没有过多的介绍,至于vmwar ...
- Docker详细介绍安装与镜像制作和拉取
一.Docker是什么? 产生背景: 开发和运维之间因为环境不同和导致的矛盾(不同的操作系统.软件环境.应用配置等)DevOps 代码.系统.环境.配置等封装成镜像Image--->运维: 集群 ...
- Java篇:Docker的介绍安装 和常用命令
文章目录 为什么 出现docker Docker的简介 容器(Container) 镜像(Image) 仓库(Repository) Docker的安装 查看容器 删除镜像 删除容器 部署应用 以my ...
- Docker系列教程01-Centos7安装新版Docker教程(10步)
最近一直忙于开发,没有时间好好总结一下docker的知识.其实现在docker的教程已经很多很多了,但是很多系统的教程都是基于Ubuntu系统,因为官方推荐使用Ubuntu系统啊,原因在于Ubuntu ...
- 3.Docker安装【Docker每天5分钟】
原文:3.Docker安装[Docker每天5分钟] Docker给PaaS世界带来的“降维打击”,其实是提供了一种非常便利的打包机制.该机制打包了应用运行所需要的整个操作系统,从而保证了本地环境和云 ...
- 本文介绍如何使用 Docker Swarm 来部署 Nebula Graph 集群,并部署客户端负载均衡和高可用
本文作者系:视野金服工程师 | 吴海胜 首发于 Nebula Graph 论坛:https://discuss.nebula-graph.com.cn/t/topic/1388 一.前言 本文介绍如何 ...
- 介绍一款docker管理工具——portainer
介绍一款docker管理工具--portainer 目录 介绍一款docker管理工具--portainer 1.背景 1.1 管理docker方法上一般有两种 1.1.1 命令行形式 1.1.2 U ...
- JLINK仿真器与ST-LINK仿真器的安装与配置.pdf
JLINK仿真器与ST-LINK仿真器的安装与配置.pdf 工欲善其事,......stm32的开发环境搭建 观看地址 说到仿真器,首先要了解一下JTAG. JTAG协议 JTAG(Joint Te ...
- webpack 介绍 & 安装 & 常用命令
webpack 介绍 & 安装 & 常用命令 webpack系列目录 webpack 系列 一:模块系统的演进 webpack 系列 二:webpack 介绍&安装 webpa ...
随机推荐
- 第一个java程序进行总结
1.java程序编写-编译-运行的过程 编写:我们将编写的java代码保存在以".java"结尾的源文件中 编译:使用javac.exe命令编译我们的java源文件.格式:java ...
- 齐博x1 APP要实现直播的关键两步
大家务必要注意,缺少这两步,你的APP将不能实现直播, 也即点击直播按钮无法启动直播推流
- RedHat7.6安装mysql8步骤
1.官网下载mysql安装包 直达链接:https://dev.mysql.com/downloads/mysql/ 2.将下载好的安装包上传到redhat系统上(有多种上传方式,本次使用Sec ...
- [Go疑难杂症]为什么nil不等于nil
现象 在日常开发中,可能一不小心就会掉进 Go 语言的某些陷阱里,而本文要介绍的 nil ≠ nil 问题,便是其中一个,初看起来会让人觉得很诡异,摸不着头脑. 先来看个例子: type Custom ...
- 用 VS Code 搞 Qt6:信号、槽,以及QObject
Qt 里面的信号(Signal)和槽(Slot)虽然看着像事件,但它实际上是用来在两个对象之间进行通信的.既然是通信,就会有发送者和接收者. 1.信号是发送者,触发时通过特有的关键字"emi ...
- 二十二、Pod存储之volume
Pod 的存储之volume 容器磁盘上的文件的生命周期是短暂的,这就使得在容器中运行重要应用时会出现一些问题.首先,当容器崩溃时,kubelet 会重启它,但是容器中的文件将丢失--容器以干净的状 ...
- VB6查看桌面分辨率和工作区大小 2022.08.22 name.vt
VB6查看桌面分辨率和工作区大小 2022.08.22 name.vt Form1 内代码如下: ' 2022年8月22日 15时15分 ' 作者:name.vt Private Sub cmdCle ...
- Java线程未捕获异常处理 UncaughtExceptionHandler
当一个线程在执行过程中抛出了异常,并且没有进行try..catch,那么这个线程就会终止运行.在Thread类中,提供了两个可以设置线程未捕获异常的全局处理器,我们可以在处理器里做一些工作,例如将异常 ...
- zk,kafka,redis哨兵,mysql容器化
1. zookeeper,kafka容器化 1.1 zookeeper+kafka单机docker模式 docker pull bitnami/zookeeper:3.6.3-debian-11-r4 ...
- Go语言核心36讲09
从本篇文章开始,我们正式进入了模块2的学习.在这之前,我们已经聊了很多的Go语言和编程方面的基础知识,相信你已经对Go语言的开发环境配置.常用源码文件写法,以及程序实体(尤其是变量)及其相关的各种概念 ...