PCL中的OpenNI点云获取框架(OpenNI Grabber Framework in PCL)
从PCL 1.0开始,PCL(三维点云处理库Point Cloud Library)提供了一个通用采集接口,这样可以方便地连接到不同的设备及其驱动、文件格式和其他数据源。PCL集成的第一个数据获取驱动是OpenNI Grabber,它使得从OpenNI兼容的设备请求数据流变得十分通用和简单。

目前PCL最新的1.8.0版本需要自行编译,而官网上的PCL 1.6.0 All-in-one Installer只支持OpenNI 1。由于我使用的奥比中光3D摄像头只支持OpenNI 2,因此必须使用PCL 1.8.0版本。从源代码开始编译可以参考官网教程Compiling from source,为了图省事我找到一个别人编译好的PCL 1.8.0 All-in-one Installer。
将PCL 1.8.0 All-in-one Installer MSVC2013 Win64下载并安装在默认的C盘路径下“C:\Program Files\PCL 1.8.0”,OpenNI2也装到默认路径下(注意最好安装到默认了路径下,否则可能出现一些问题)。安装好后可以参考官网的教程The OpenNI Grabber Framework in PCL,实现3D点云实时获取。不过官网的教程还停留在OpenNI 1。而在OpenNI 2中OpenNIGrabber()函数的调用方式有所不同,如下所示:
// OpenNI 1:
pcl::Grabber* interface = new pcl::OpenNIGrabber(); // #include <pcl/io/openni_grabber.h> // OpenNI 2:
pcl::Grabber* interface = new pcl::io::OpenNIGrabber(); // #include <pcl/io/openni2_grabber.h>
注意相应的头文件也要改变。通过下面简单的代码,可以实现从3D体感摄像头中读取深度信息,并实时显示3D点云:
#include <pcl/io/openni2_grabber.h>
#include <pcl/visualization/cloud_viewer.h> class SimpleOpenNIViewer
{
public:
SimpleOpenNIViewer() : viewer("PCL OpenNI Viewer") {} // Construct a cloud viewer, with a window name // 定义回调函数cloud_cb_,获取到数据时对数据进行处理
void cloud_cb_(const pcl::PointCloud<pcl::PointXYZ>::ConstPtr &cloud)
{
if (!viewer.wasStopped()) // Check if the gui was quit. true if the user signaled the gui to stop
viewer.showCloud(cloud);
} void run()
{
// create a new grabber for OpenNI devices
pcl::Grabber* interface = new pcl::io::OpenNI2Grabber(); // make callback function from member function
boost::function<void(const pcl::PointCloud<pcl::PointXYZ>::ConstPtr&)> f =
boost::bind(&SimpleOpenNIViewer::cloud_cb_, this, _1); // connect callback function for desired signal
boost::signals2::connection c = interface->registerCallback(f); // start receiving point clouds
interface->start(); while (!viewer.wasStopped())
{
boost::this_thread::sleep(boost::posix_time::seconds());
} // Stop the data acquisition
interface->stop();
} pcl::visualization::CloudViewer viewer;
}; int main()
{
SimpleOpenNIViewer v; v.run(); return ;
}
上面代码中SimpleOpenNIViewer的run()函数首先创建了一个新的OpenNI2Grabber接口。接下来用回调函数cloud_cb_地址创建boost::bind对象,给SimpleOpenNIViewer传递一个引用和参数_1作为占位符。The bind then gets casted to a boost::function object which is templated on the callback function type, in this case void (const pcl::PointCloud<pcl::PointXYZ>::ConstPtr&). The resulting function object can the be registered with the OpenNIGrabber and subsequently started.
OpenNIGrabber提供不止一种数据类型,我们可以注册下面几种类型的回调函数:
1. void (const boost::shared_ptr<const pcl::PointCloud<pcl::PointXYZRGB> >&)
2. void (const boost::shared_ptr<const pcl::PointCloud<pcl::PointXYZ> >&)
3. void (const boost::shared_ptr<openni_wrapper::Image>&) 这仅仅提供内置摄像头生成的RGB图像
4. void (const boost::shared_ptr<openni_wrapper::DepthImage>&) 这个提供深度图像,不带任何颜色或者亮度信息。
5. void (const boost::shared_ptr<openni_wrapper::Image>&, const boost::shared_ptr<openni_wrapper::DepthImage>&, float constant) 采集器会发送RGB图像和深度图像
注意:所有需要深度图像和RGB图像流的回调函数类型都会启用一个同步机制,它能保证图像和深度数据的一致。这样引入了一个小的时延,因为同步机制在发送第一张图像之前至少需要等待采集到一组图片。
调用registerCallback将返回一个boost::signals2::connection对象,上面的例子里我们忽略掉了它。然而,如果你想要中断或者取消一个或多个注册数据流,只需要断开与回调函数的连接,而不用停止整个采集器,这样其他还在进行处理的回调函数可以正常工作:
boost::signals2::connection c = interface (registerCallback (f)); // ... if (c.connected ())
c.disconnect ();
下面通过CMake创建工程文件:
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(openni_grabber)
find_package(PCL 1.8 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (openni_grabber openni_grabber.cpp)
target_link_libraries (openni_grabber ${PCL_LIBRARIES})
从这里开始我遇到了很多奇怪的问题:
1. 一开始我使用CMake生成VS2010的工程文件,可是在生成工程文件过程中总是出现“common is required but boost was not found”错误:
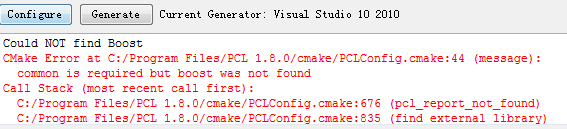
按照网上提出的修改CMake文件等方式还是不管用,后来有人说是因为版本问题,应该对应的选择生成VS2013工程文件。
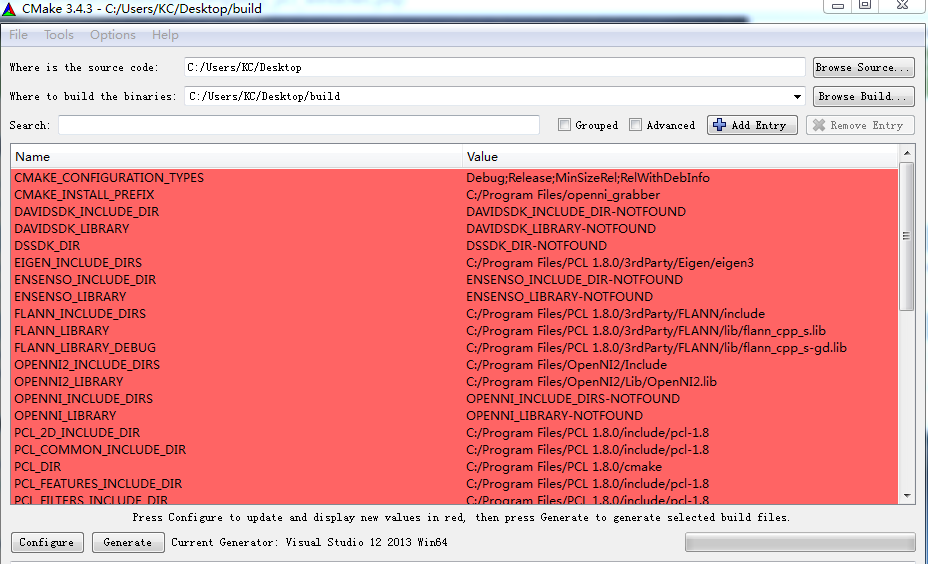
2. 我又装了一个VS2013,这次选择生成VS2013工程文件,生成过程中出现了一些警告信息,如OPENNI_LIBRARY-NOTFOUND等,忽略这些信息;
打开成功生成的工程文件,进行编译:
可是在生成解决方案时,出现了这种错误: fatal error C1001: 编译器中发生内部错误。1> (编译器文件“msc1.cpp”,第 1325 行)
网上查找原因,说是VS2013编译器的Bug,需要安装Microsoft Visual Studio 2013 Update 5(适用于Visual Studio 2013的一系列新增功能和Bug修复中的最新更新)。这个更新的安装过程比较漫长...怎么安装这个更新可以参考百度知道:怎样更新VS2013 update 5
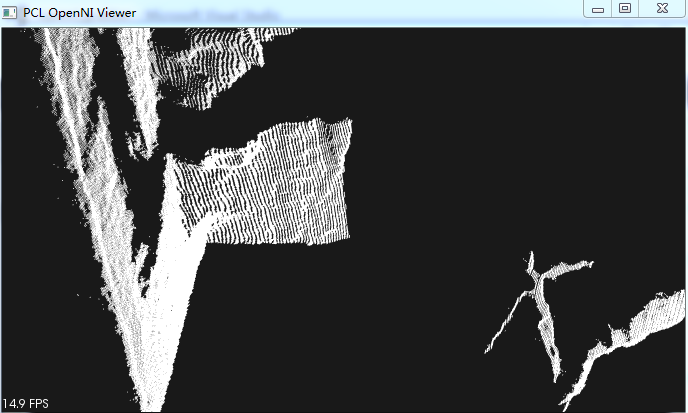
更新装完后再重新生成就可以了,下面是通过获取摄像头探测到的深度信息生成的3D点云:
参考:
The OpenNI Grabber Framework in PCL
Capture Point Cloud with PCL 1.8 and Kinect
http://unanancyowen.com/en/pcl18/
pcl/visualization/tools/openni2_viewer.cpp
PCL中的OpenNI点云获取框架(OpenNI Grabber Framework in PCL)的更多相关文章
- 在PCL中如何实现点云压缩(2)
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=125 压缩配置文件: 压缩配置文件为PCL点云编码器定义了参数集.并针对压缩 ...
- 在PCL中如何实现点云压缩(1)
点云由庞大的数据集组成,这些数据集通过距离.颜色.法线等附加信息来描述空间三维点.此外,点云能以非常高的速率被创建出来,因此需要占用相当大的存储资源,一旦点云需要存储或者通过速率受限制的通信信道进行传 ...
- PCL—低层次视觉—点云分割(邻近信息)
分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最简单的分割方式就是在边界上找些居民问:"小伙子,你到底能不能上油管啊?”.然后把能上油管的居民坐标 ...
- PCL中outofcore模块---基于核外八叉树的大规模点云的显示
写在前面 最近公众号的活动让更多的人加入交流群,尝试提问更多的我问题,群主也在积极的招募更多的小伙伴与我一起分享,能够相互促进. 这里总结群友经常问,经常提的两个问题,并给出我的回答: (1) ...
- 基于传统方法点云分割以及PCL中分割模块
之前在微信公众号中更新了以下几个章节 1,如何学习PCL以及一些基础的知识 2,PCL中IO口以及common模块的介绍 3,PCL中常用的两种数据结构KDtree以及Octree树的介绍 ...
- PCL中IO模块和类的介绍
I/O模块中共有21个类 (1)class pcl::FIleReader:定义了PCD文件的读取接口,主要用作其他读取类的父类 pcl::FileReader有pcl::PCDReader和pc ...
- PCL中的类
1. PCLBase pcl_base.h中定义了PCL中的基类PCLBase,PCL中的大部分算法都使用了其中的方法. PCLBase实现了点云数据及其索引的定义和访问. 两个主要的变量input_ ...
- kd-tree理论以及在PCL 中的代码的实现
(小技巧记录:博客园编辑的网页界面变小了使用Ctrl ++来变大网页字体) 通过雷达,激光扫描,立体摄像机等三维测量设备获取的点云数据,具有数据量大,分布不均匀等特点,作为三维领域中一个重要的数据来 ...
- kd-tree理论以及在PCL 中的代码的实现(转载)
该文转自:https://www.cnblogs.com/li-yao7758258/p/6437440.html kd-tree理论以及在PCL 中的代码的实现 (小技巧记录:博客园编辑的网页界 ...
随机推荐
- Chart:ECharts
ylbtech-Chart:ECharts ECharts,一个纯 Javascript 的图表库,可以流畅的运行在 PC 和移动设备上,兼容当前绝大部分浏览器(IE8/9/10/11,Chrome, ...
- query多选下拉框插件 jquery-multiselect(修改)
其实网上关于该控件的使用教程已经很多了,其中 query多选下拉框插件 jquery-multiselect Jquery多选下拉列表插件jquery multiselect功能介绍及使用 这2个的介 ...
- 微信小程序显示html格式内容(wxParse使用及循环解析数据渲染)
小程序默认是不支持html格式的内容显示的,那我们需要显示html内容的时候,就可以通过wxParse来实现. 首先我们下载wxParse,github地址:https://github.com/ic ...
- java log4j日志配置
1.首先看pom.xml文件,需要以下配置 <dependency> <groupId>log4j</groupId> <artifactId>log4 ...
- Graph 卷积神经网络:概述、样例及最新进展
http://www.52ml.net/20031.html [新智元导读]Graph Convolutional Network(GCN)是直接作用于图的卷积神经网络,GCN 允许对结构化数据进行端 ...
- Linux系统下对NFS服务安全加固的方法
NFS(Network File System)是 FreeBSD 支持的一种文件系统,它允许网络中的计算机之间通过 TCP/IP 网络共享资源.不正确的配置和使用 NFS,会带来安全问题. 概述 N ...
- 3D打印机开源、免费分层软件介绍
分层软件,就是把3D模型按照层厚设置按照Z轴方向分层,并得到G代码,供设备使用.基本上3D打印机都自带了控制软件,对于想自己开发3D打印机的朋友来说,已经有很多国外的免费或者开源的分层软件可以直接使用 ...
- AVR单片机命名规则
ATmega64 TQFP封装现主要有以下型号:ATmega64L-8AU.ATmega64L-8AI.ATmega64-16AU.ATmega64-16AI. 型号标识说明: (1)带"L ...
- 转: git使用时让http记住帐号密码
见 http://git.mydoc.io/?t=154710 https 方式每次都要输入密码,按照如下设置即可输入一次就不用再手输入密码的困扰而且又享受 https 带来的极速 按照以下设置记住密 ...
- Eclipse导入GitLab中指定分支的项目
一.如果主分支丢失,是否可以恢复其他分支? 答案是可以的,下面我们就拿恢复分支publish-2018-6-5来说明问题,最终实现把分支publish-2018-6-5还原成项目放到Eclipse中 ...