斜率优化初探:以 [HNOI2008]玩具装箱 为例
记 \(f[i]\) 表示装好前 \(i\) 个的最小花费。容易写出转移:
\]
直接转移是 \(O(n ^ 2)\) 的,我们考虑斜率优化。
斜率优化的过程
(一)问题转化成了求最小截距。
我们把 \(min\) 的外壳去掉,并且提前把 \(L +1\) (式子更简洁) 可以得到:
\]
把括号打开,可以得到:
\]
移项后得到:
\]
此时,如果我们把这看做一个一次函数,那么
x = s[j]\\
b = (f[i] - s[i] ^ 2 + 2 \times s[i] \times L)\\
y = f[j] + (s[j] +L) ^ 2
\]
注意到固定 \(i\) 后,\(k\) 是固定的。而对于每个 \(j\), 我们都可求出对应的 \((x, y)\)。此时当 \(b\) 最小时,\(f[i]\) 也会最小。
(二)截距在哪里最小?(图像理解)
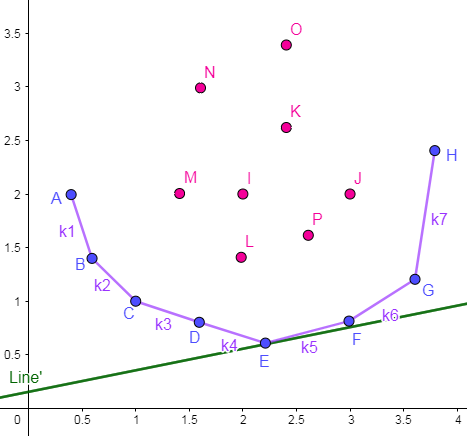
我们知道有用的 \(j\) 在二维平面上形成的点阵是个凸包。
我们惊讶的发现斜率竟然是固定的!我们可以平移这条直线至与凸包相切,显然这个切点 \(E\), 就对应着最小的截距。
怎么找这个点呢?发现 \(E\) 点以前的斜率都小于当前 \(k\), \(E\) 点之后的斜率都大于等于 \(k\), 因此可以二分这个位置。时间复杂度 \(O(nlogn)\)。
(三)决策单调性的优化(图像理解)
决策单调性的定义:
设 \(j_0[i]\) 表示 \(f[i]\) 转移的最优决策点,那么 决策单调性 可以描述为 \(\forall i \le i'\), \(j_0[i] \le j_0[i']\)。即随着 \(i\) 递增,所找到的 最优决策点 是递增态(非严格递增)。
发现 \(k = 2s[i]\), 而 \(s[i]\) 是前缀和,显然是递增的,那么我们的决策点也一定会越来越大(因为目标斜率递增)
详细证明参见参考博客。
用单调队列维护凸包的点集,分三步:
- 将斜率比目标斜率小的点弹出, 在队首位置找到最优决策点 \(j\)。
- 用最优决策点 \(j\) 更新 \(dp[i]\)。
- 把新的点加入队列中。
时间复杂度 \(O(n)\)。
#include<bits/stdc++.h>
#define F(i,l,r) for(int i(l);i<=(r);++i)
#define G(i,r,l) for(int i(r);i>=(l);--i)
#define int ll
using namespace std;
using ll = long long;
const int N = 1e5 + 5;
int L, n, h = 1, t = 0;
int f[N], s[N], q[N];
int X(int j){
return s[j] +L;
}
int Y(int j){
return f[j] + (s[j] + L) * (s[j] + L);
}
long double slope(int i, int j){
return (long double)(Y(i) - Y(j)) / (long double)(X(i) - X(j));
}
signed main(){
ios::sync_with_stdio(0); cin.tie(0); cout.tie(0);
cin >> n >> L;
++L;
F(i, 1, n) cin >> s[i], s[i] += s[i - 1] + 1;
q[++t] = 0;
F(i, 1, n){
while(h < t && slope(q[h], q[h + 1]) < 2 * s[i]) ++ h;
int j = q[h];
f[i] = f[j] + (s[i] - s[j] - L) * (s[i] - s[j] - L);
while(h < t && slope(q[t - 1], q[t]) > slope(q[t - 1], i)) -- t;
q[++ t] = i;
}
cout << f[n] << '\n';
return 0;
}
反思:移项的依据
为了用 \(Function(i)\) 表示出 \(Function(j)\),我们把含 \(i\) 的东西移到等式左边,把含 \(j\) 的东西移到等式右边。以此整理出 "不变的 \(k\),待求解的 \(b\),确定的 \(x, y\)"。 记得 \(f[i]\) 一定要放在截距 \(b\) 里面!因为我们是对 截距 求解极值。
注意 \(k, x, y\) 都是确定的,只有 \(b\) 是待定的。
参考博客:
【学习笔记】动态规划—斜率优化DP(超详细) - 辰星凌 - 博客园 (cnblogs.com)
斜率优化初探:以 [HNOI2008]玩具装箱 为例的更多相关文章
- 【斜率优化】BZOJ1010 [HNOI2008]玩具装箱toy
[题目大意] P教授有编号为1...N的N件玩具,第i件玩具长度为Ci.为了方便整理,P教授要求在一个一维容器中的玩具编号是连续的.如果将第i件玩具到第j个玩具放到一 个容器中,那么容器的长度将为 x ...
- BZOJ 1010: [HNOI2008]玩具装箱toy [DP 斜率优化]
1010: [HNOI2008]玩具装箱toy Time Limit: 1 Sec Memory Limit: 162 MBSubmit: 9812 Solved: 3978[Submit][St ...
- BZOJ 1010: [HNOI2008]玩具装箱toy 斜率优化DP
1010: [HNOI2008]玩具装箱toy Description P教授要去看奥运,但是他舍不下他的玩具,于是他决定把所有的玩具运到北京.他使用自己的压缩器进行压缩,其可以将任意物品变成一堆,再 ...
- 【BZOJ 1010】 [HNOI2008]玩具装箱toy (斜率优化)
1010: [HNOI2008]玩具装箱toy Time Limit: 1 Sec Memory Limit: 162 MBSubmit: 9330 Solved: 3739 Descriptio ...
- bzoj 1010 [HNOI2008]玩具装箱toy(DP的斜率优化)
1010: [HNOI2008]玩具装箱toy Time Limit: 1 Sec Memory Limit: 162 MBSubmit: 7874 Solved: 3047[Submit][St ...
- bzoj1010[HNOI2008]玩具装箱toy 斜率优化dp
1010: [HNOI2008]玩具装箱toy Time Limit: 1 Sec Memory Limit: 162 MBSubmit: 11893 Solved: 5061[Submit][S ...
- [HNOI2008]玩具装箱TOY --- DP + 斜率优化 / 决策单调性
[HNOI2008]玩具装箱TOY 题目描述: P教授要去看奥运,但是他舍不下他的玩具,于是他决定把所有的玩具运到北京. 他使用自己的压缩器进行压缩,其可以将任意物品变成一堆,再放到一种特殊的一维容器 ...
- BZOJ 1010: [HNOI2008]玩具装箱toy(DP+斜率优化)
[HNOI2008]玩具装箱toy Description P教授要去看奥运,但是他舍不下他的玩具,于是他决定把所有的玩具运到北京.他使用自己的压缩器进行压缩,其可以将任意物品变成一堆,再放到一种特殊 ...
- bzoj1010: [HNOI2008]玩具装箱toy(DP+斜率优化)
1010: [HNOI2008]玩具装箱toy 题目:传送门 题解: 很明显的一题动态规划... f[i]表示1~i的最小花费 那么方程也是显而易见的:f[i]=min(f[j]+(sum[i]-su ...
- Bzoj 1010: [HNOI2008]玩具装箱toy(斜率优化)
1010: [HNOI2008]玩具装箱toy Time Limit: 1 Sec Memory Limit: 162 MB Description P教授要去看奥运,但是他舍不下他的玩具,于是他决定 ...
随机推荐
- python分布式事务方案(二)基于消息最终一致性
荐
python分布式事务方案(二)基于消息最终一致性 上一章采用的是tcc方案,但是在进行批量操作时,比如说几百台主机一起分配策略时,会执行很长时间,这时体验比较差. 由于zabbix隐藏域后台,而这个 ...
- Parallels Desktop 虚拟机网络地址
bridge100 是宿主机在共享网络中的地址 bridge101 是宿主机在 Host-Only 网络中的地址 查询宿主机 IP 地址 $ ip addr show # 共享网络(默认) bridg ...
- 全网最适合入门的面向对象编程教程:41 Python 常用复合数据类型-队列(FIFO、LIFO、优先级队列、双端队列和环形队列)
全网最适合入门的面向对象编程教程:41 Python 常用复合数据类型-队列(FIFO.LIFO.优先级队列.双端队列和环形队列) 摘要: 在 Python 中,队列(Queue)是一种常用的数据结构 ...
- 基于surging 如何利用peerjs进行语音视频通话
一 . 概述 PeerJS 是一个基于浏览器WebRTC功能实现的js功能包,简化了WebrRTC的开发过程,对底层的细节做了封装,直接调用API即可,再配合surging 协议组件化从而做到稳定,高 ...
- linux 前端部署 tomcat 脚本
前提: 打包后的文件位置:/home/usr/back 目的部署位置:/home/usr/prod1 目的部署位置:/home/usr/prod2 在linux 服务器上 新增文件deploy-web ...
- SpringMVC:SpringMVC执行流程
目录 SpringMVC常用组件 DispatcherServlet初始化过程 ①初始化WebApplicationContext ②创建WebApplicationContext ③Dispatch ...
- 【YashanDB数据库】YAS-02032 column type is incompatible with referenced column type
[标题]错误码处理 [问题分类]外键约束创建报错 [关键字]YAS-02032 [问题描述]设置外键约束报错,数据元数据不正确. [问题原因分析]外键字段类型不支持,比如varchar2(64) ,指 ...
- 音视频入门-7-ffmpeg小实验-v4l2 ubuntu 获取摄像头图像并进行格式转换
1. Linux内我们使用V4L2框架获取摄像头数据,由于摄像头的不同,摄像头所输出的数据格式各有不同. 考虑到YUV420P 的格式使用最广泛,我们最终将摄像头数据转为该格式. pic_dat ...
- 开发板、windows、虚拟机互相ping通/ VMNET0、VMNET1、VMNET8释义
当前环境:板子通过网线连接windows 问题: 我当前的板子可以ping通windows,windows也能ping通ubuntu.但是板子却ping不通ubuntu. 原因: ubuntu通过NA ...
- @RestController和@Controller的区别
@RestController 和 @Controller 是Spring框架中用于定义控制器(Controller)的两个非常重要的注解,它们都用于处理HTTP请求,但它们之间存在一些关键的区别. ...