C#实现欧姆龙 HostLink 通讯协议库
C#实现欧姆龙 HostLink 通讯协议库
运行环境:VS2022 .net framework4.8
通讯库项目地址(Gitee):通讯库项目Gitee 仓库
控制台测试项目地址(Gitee):控制台测试项目Gitee 仓库
HostLink 通讯手册链接(蓝奏云):SYSMAC Series Communications Commands
官方的 HostLink 串口通讯示例(蓝奏云):C-Mode || FINS-Mode
通讯工具(蓝奏云):Commix 1.4
概要:根据欧姆龙的 HostLink 通讯协议手册内容,使用串口实现了 PC 与 PLC 的通讯,能够通过C-Mode与FINS-Mode两种模式实现 PC 读写 PLC 的CIO、WR、HR、DM 四个内存区的内容(同步/异步方法),而且可以以较高的通讯效率获取所需数据、错误代码等信息,最后用一个 C#控制台项目测试了通讯库功能
背景介绍
HostLink 协议是欧姆龙 PLC 与主机通讯的一种公开协议,PC 可通过 HostLink 命令对 PLC 的运行状态、I/O 点位的读写
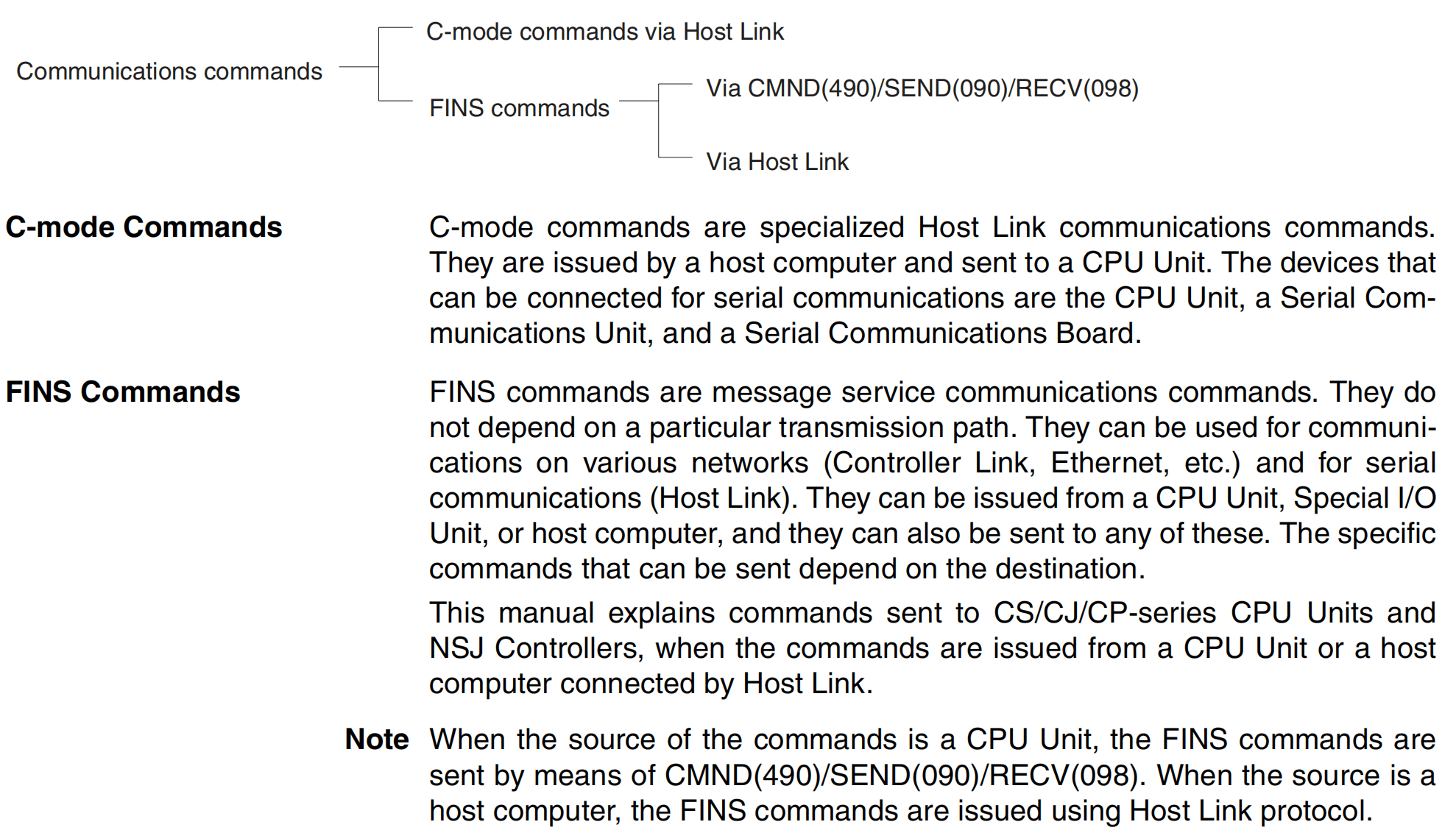
HostLink 分为 C-Mode 和 FINS-Mode 两种模式
C-Mode 命令是专门的主机链路通信命令,它们由主机发出并发送至 CPU 单元。可连接用于串行通信的设备有 CPU 单元、串行通信单元和串行通信板。
FINS-Mode 命令是报文服务通信命令,它们不依赖于特定的传输路径。它们可用于各种网络(控制器链路、以太网等)和串行通信(主机链路)。它们可以从 CPU 单元、特殊 I/O 单元或主机发出,也可以发送到其中任何一个单元。可发送的具体命令取决于目的地。
欧姆龙 PLC 内存区域介绍
| 内存区域名 | 区域说明 |
|---|---|
| CIO | I/O 继电器区 |
| WR | 内部辅助继电器区 |
| HR | 保持继电器区 |
| DM | 数据存储区 |
| TIM | 定时器区 |
| CNT | 计数器区 |
| IR | 变址寄存器区 |
| DR | 数据寄存器 |
| AR | 特殊辅助继电器区 |
| TR | 暂存区 |
| TK | 状态标志、时钟脉冲、任务标志 |
欧姆龙 PLC 数据类型对应
| PLC 数据类型 | PC 数据类型 |
|---|---|
| Bit | bool |
| Byte | ushort |
| DWord | uint |
| Int | short |
| Dint | int |
| float | float |
| String | string |
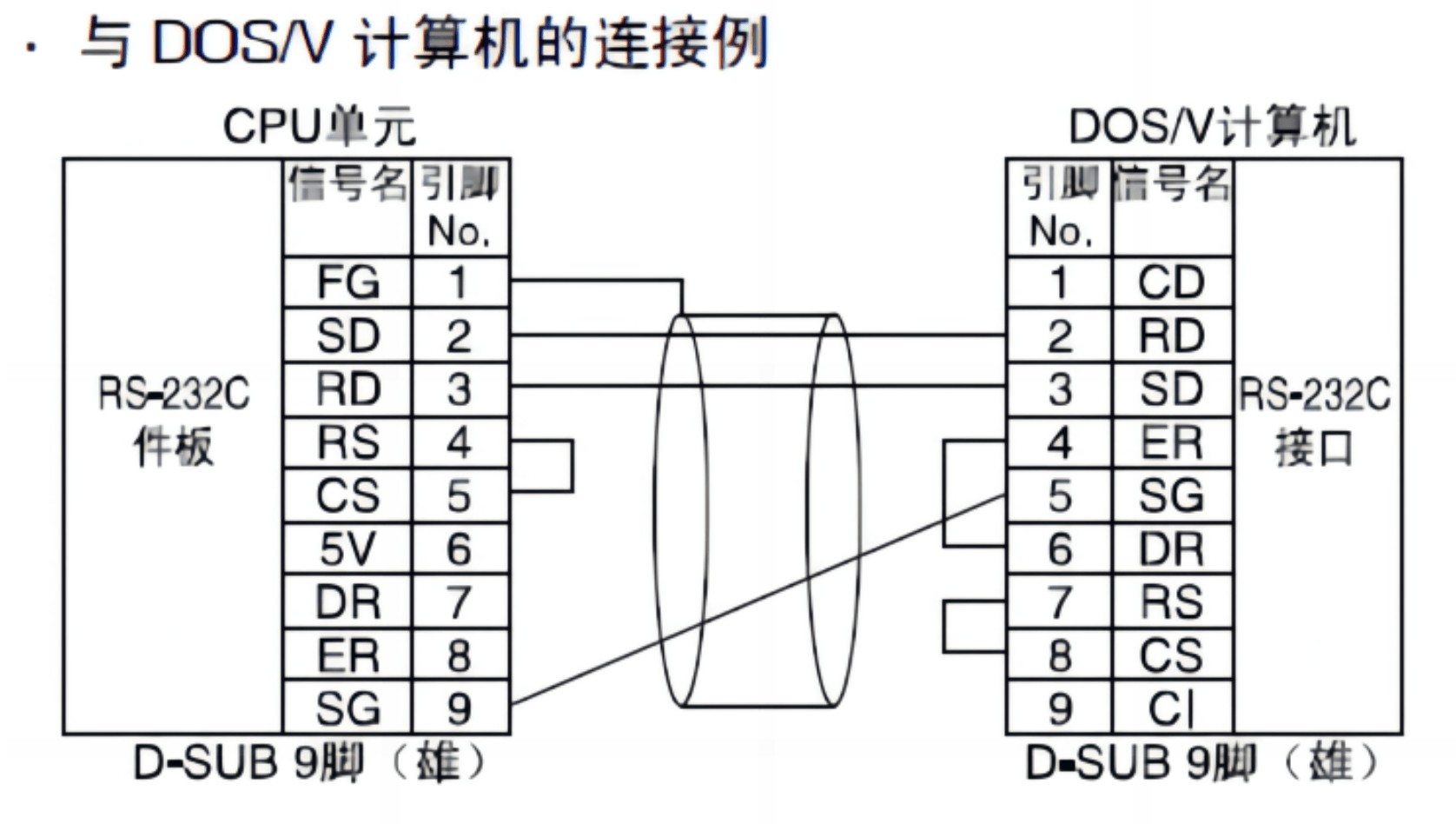
欧姆龙 PLC 与 PC 的 RS232 接线线序
HostLink通讯报文分析
根据C-Mode和FINS的报文进行分析
C-Mode通讯报文分析
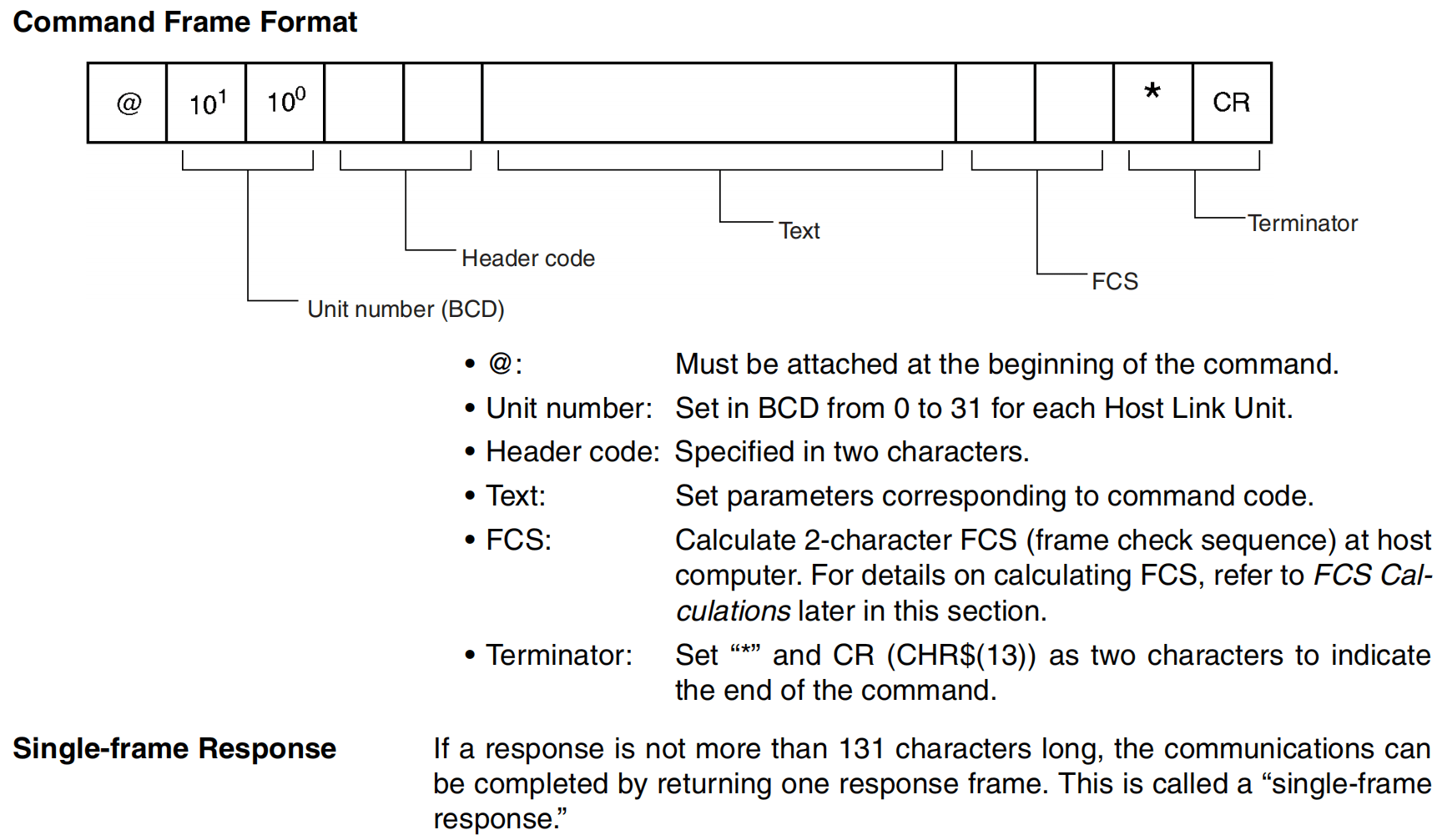
发送报文如下图所示
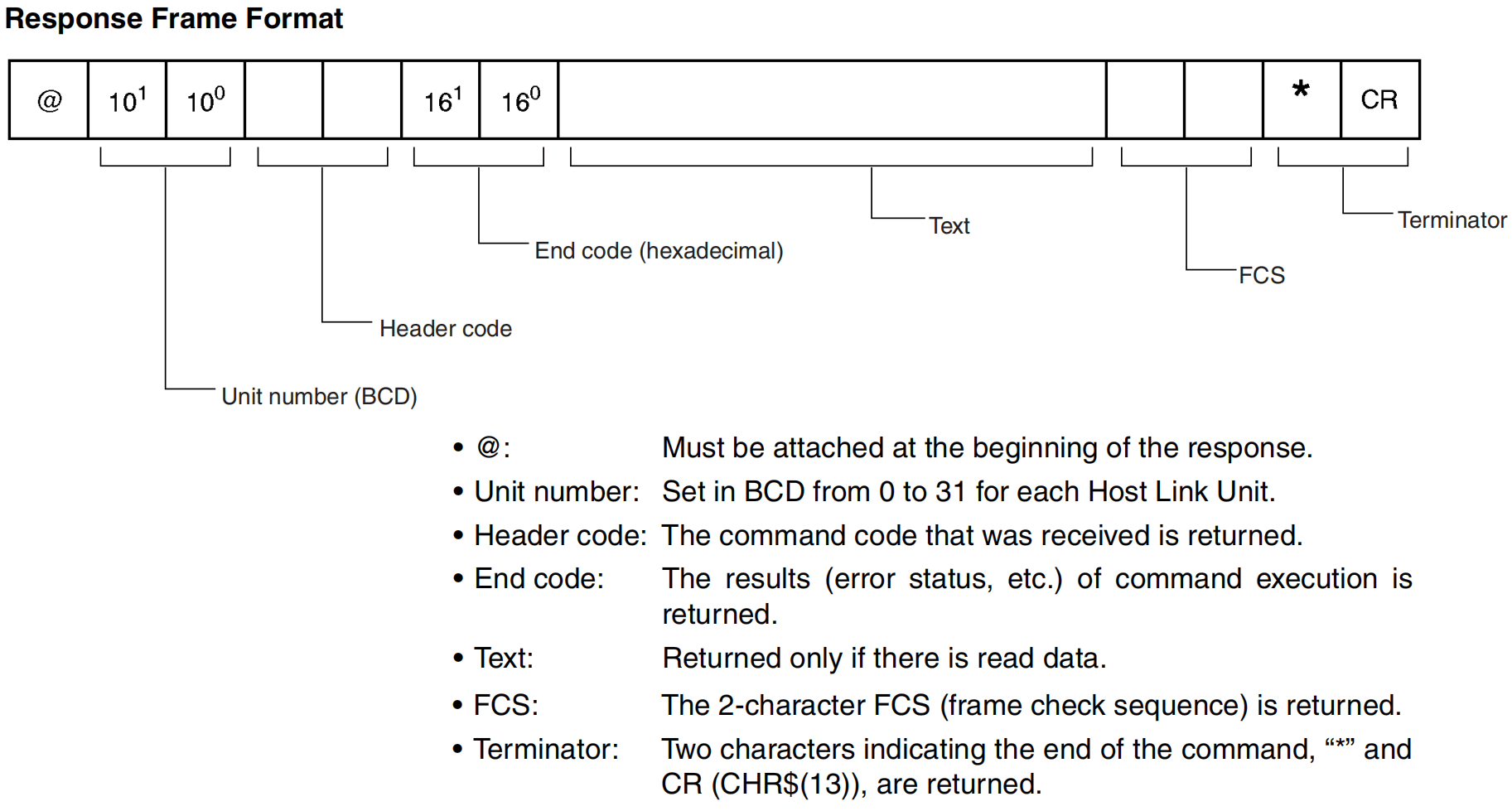
正常接收报文如下图所示
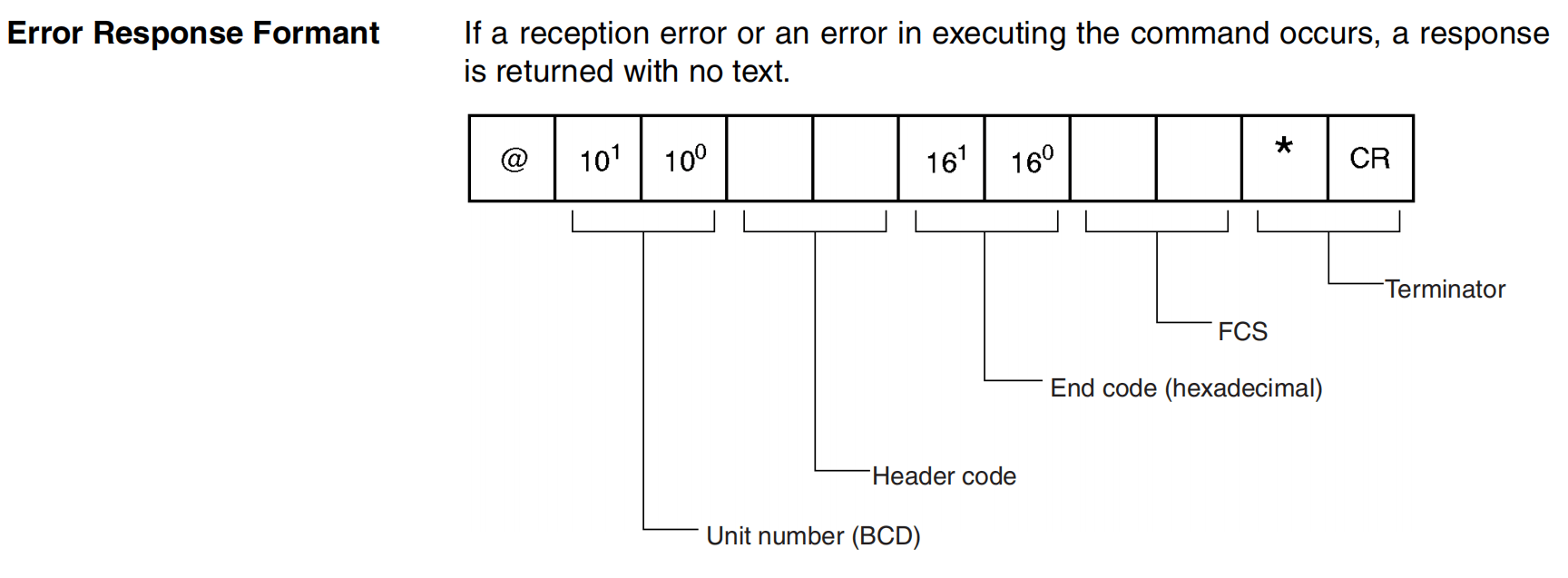
通讯出错接收报文如下图所示
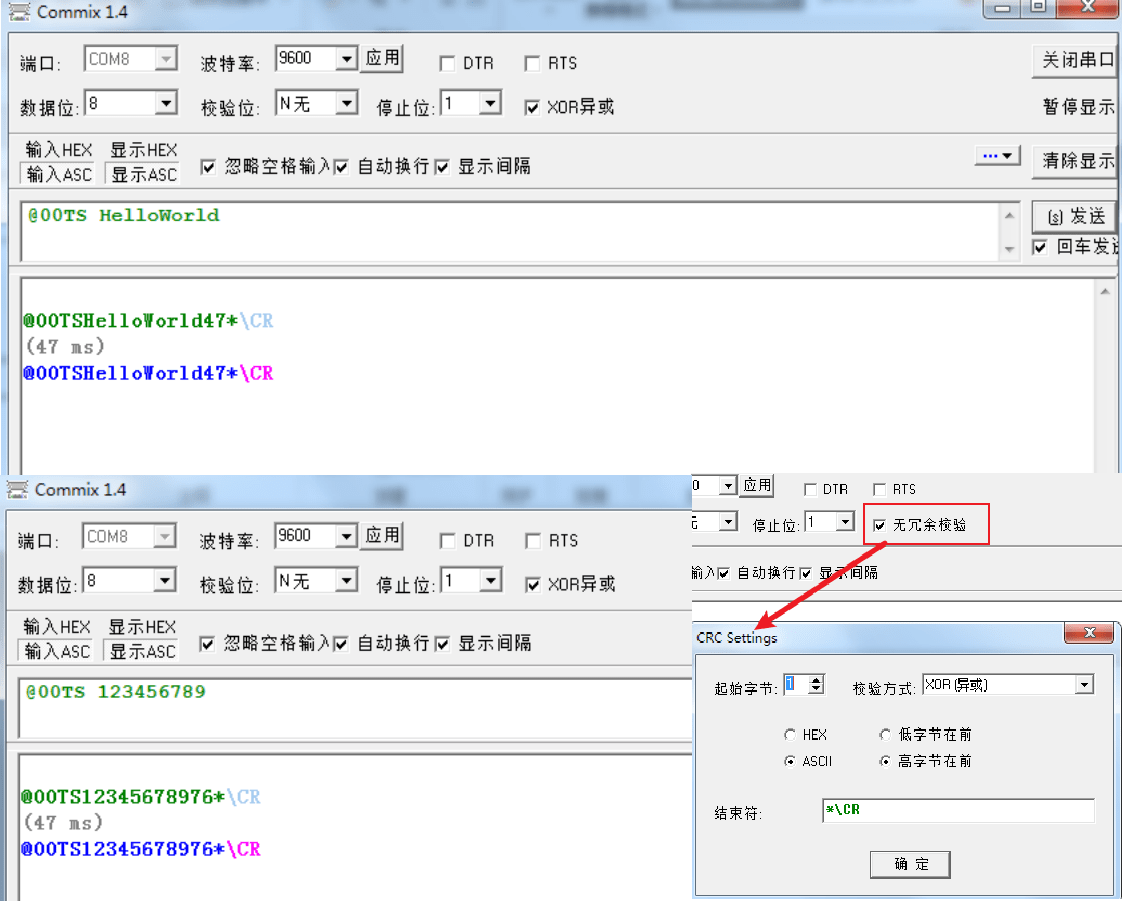
使用串口工具Commix进行测试如下图所示
TS命令:
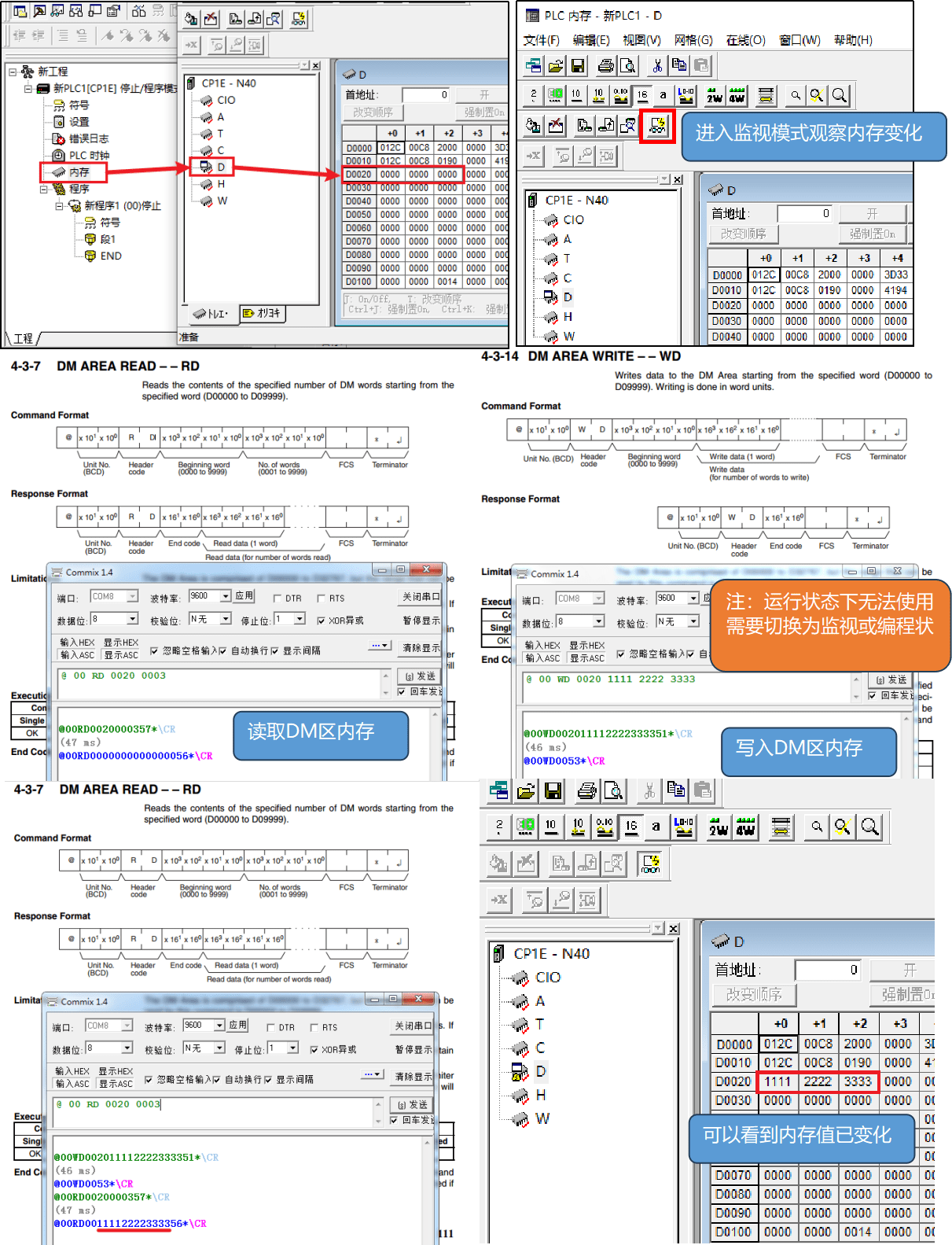
RD、WD命令:
FINS-Mode通讯报文分析
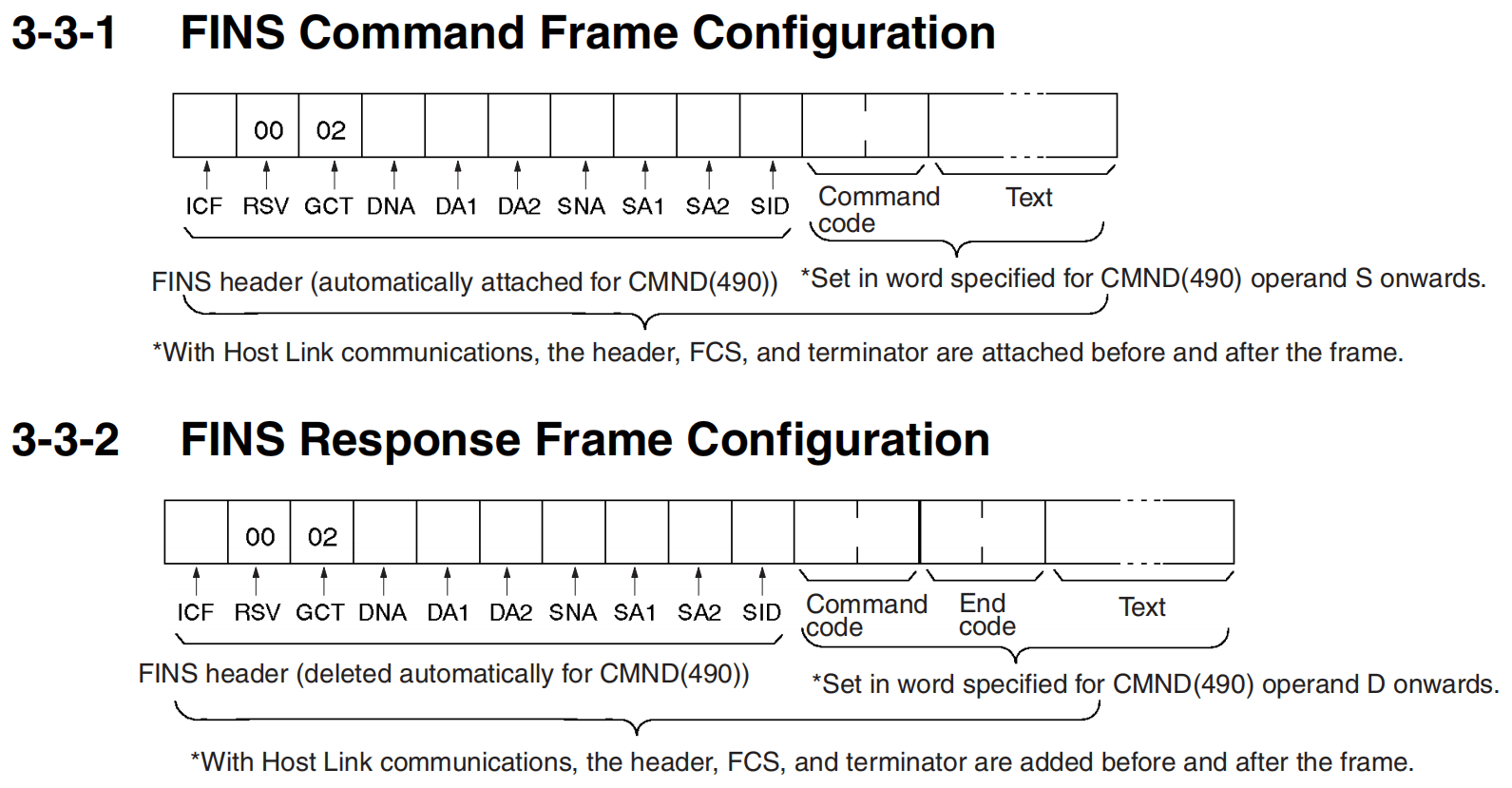
发送报文如下图所示
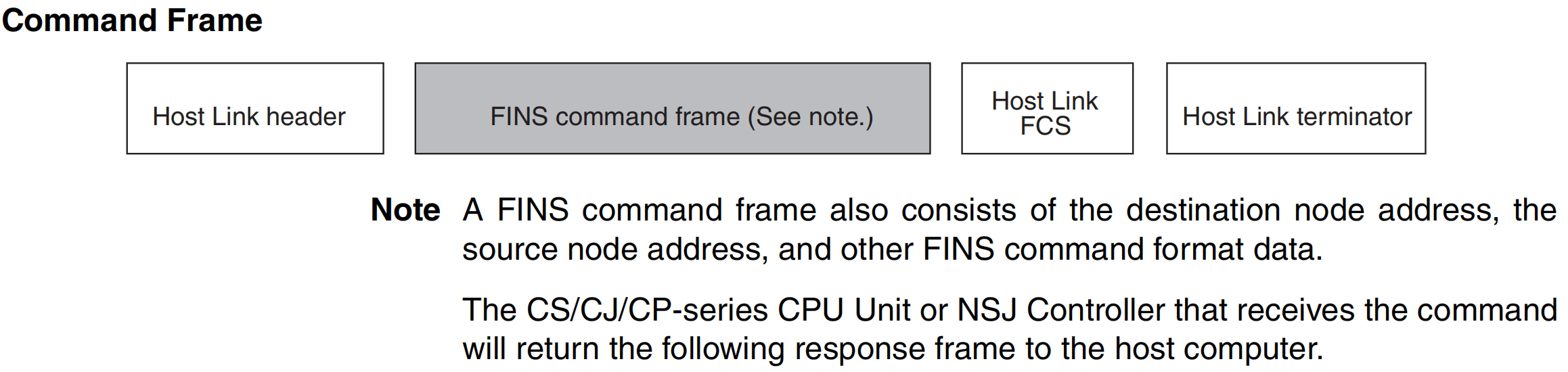
接收报文如下图所示
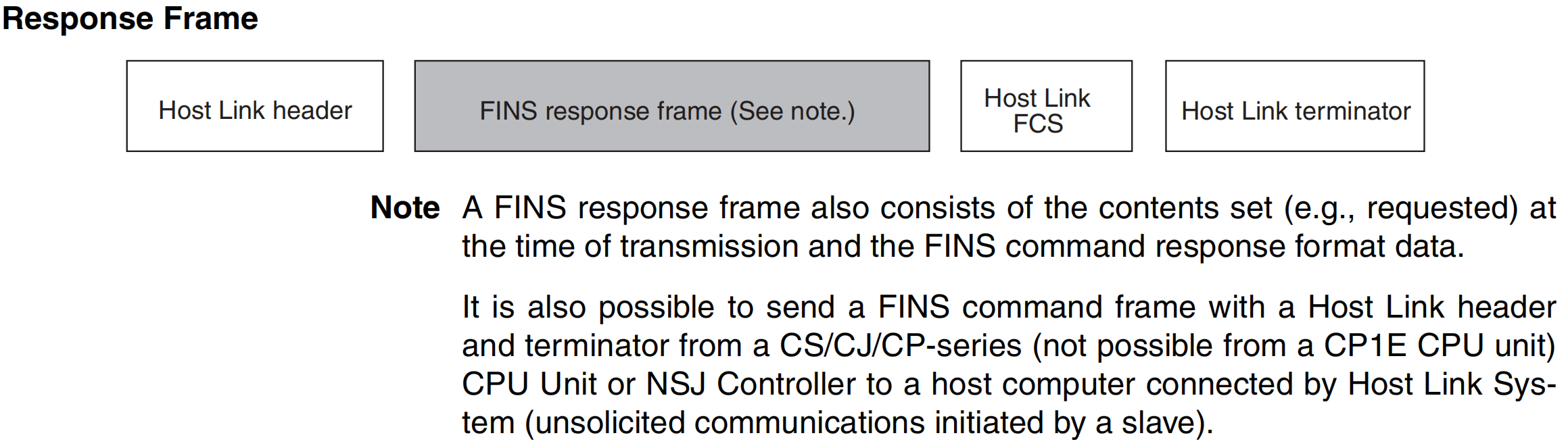
FINS指令配置如下图所示
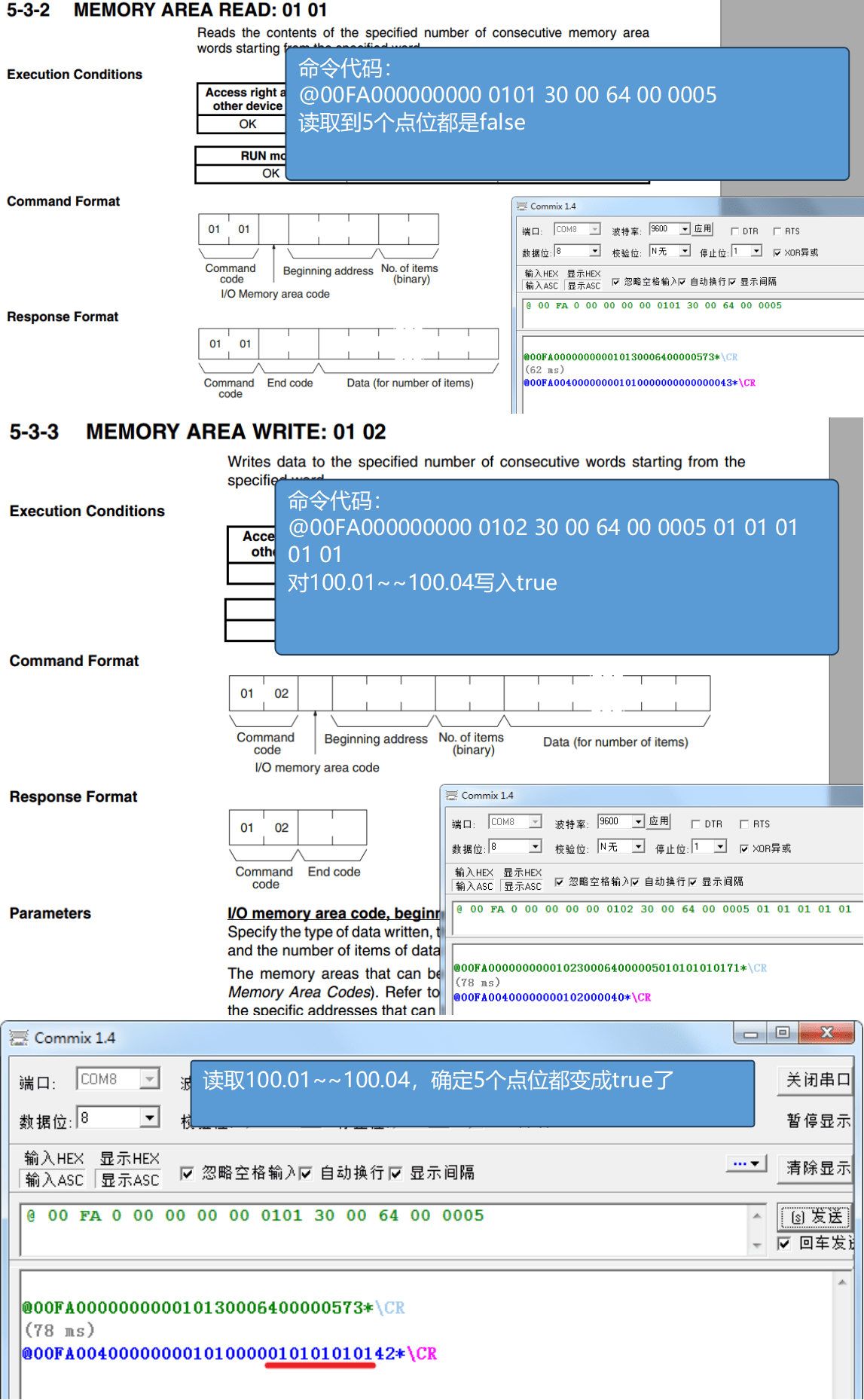
使用串口工具Commix进行测试如下图所示
0101、0102命令:
HostLink通讯协议库的C#实现
核心实现(FCS校验码生成、串口收发)
HostLinkCore.cs
在这里我本来想给异步的方法加上一个SemaphoreSlim来限制通讯的信号量的,但是后来想了想还是让使用者在外面自己加好了:)
SemaphoreSlim具体的使用方法可以参考文章的C#控制台项目
/// <summary>
/// 通过命令帧计算FCS异或校验码并加上结束符
/// </summary>
/// <param name="CommandFrame">命令帧</param>
/// <returns>4位字节数组,包含FCS校验码与结束符</returns>
public static List<byte> HostLinkEndCode(List<byte> CommandFrame)
{
try
{
List<byte> EndCode = new List<byte>();
short FCSNum = HostLinkFCS(CommandFrame);
string HexString = FCSNum.ToString("X2");
EndCode.AddRange(Encoding.ASCII.GetBytes(HexString));
EndCode.AddRange(new List<byte> { 0x2A, 0x0D });
return EndCode;
}
catch (Exception)
{
throw;
}
}
/// <summary>
/// 对字节数组进行异或运算得到数值
/// </summary>
/// <param name="CommandFrame">命令帧</param>
/// <returns>异或运算结果(short类型)</returns>
public static short HostLinkFCS(List<byte> CommandFrame)
{
try
{
short CheckNum = 0;
foreach (byte FrameNum in CommandFrame)
{
CheckNum ^= FrameNum;
}
return CheckNum;
}
catch (Exception)
{
throw;
}
}
/// <summary>
/// 检查回复帧是否完整
/// </summary>
/// <param name="frame">回复帧</param>
/// <returns>完整结尾:返回True;不完整:返回False</returns>
private static bool CheckResponseFrame(List<byte> frame)
{
if (frame.Count > 0 && frame[frame.Count - 1] == (byte)0x0D)
{
return true;
}
else
{
return false;
}
}
/// <summary>
/// HostLink报文发送与接收代码
/// </summary>
/// <param name="serialPort">串口实例</param>
/// <param name="CommandFrame">命令帧</param>
/// <returns>回复帧</returns>
public static List<byte> HostLinkCommCore(SerialPort serialPort, List<byte> CommandFrame)
{
try
{
List<byte> ResponseFrame = new List<byte>();
//发送报文
serialPort.Write(CommandFrame.ToArray(), 0, CommandFrame.Count);
//循环读取数据
while (serialPort.IsOpen)
{
if (serialPort.BytesToRead > 0)
{
byte[] buffer = new byte[serialPort.BytesToRead];
serialPort.Read(buffer, 0, buffer.Length);
ResponseFrame.AddRange(buffer);
if (CheckResponseFrame(ResponseFrame))
{
return ResponseFrame;
}
}
}
return null;
}
catch (Exception)
{
throw;
}
}
/// <summary>
/// HostLink报文发送与接收代码(异步方法)
/// </summary>
/// <param name="serialPort">串口实例</param>
/// <param name="CommandFrame">命令帧</param>
/// <returns>回复帧</returns>
public static async Task<List<byte>> HostLinkCommCoreAsync(SerialPort serialPort, List<byte> CommandFrame)
{
try
{
List<byte> ResponseFrame = new List<byte>();
//发送报文
await serialPort.BaseStream.WriteAsync(CommandFrame.ToArray(), 0, CommandFrame.Count);
//循环读取数据
while (serialPort.IsOpen)
{
if (serialPort.BytesToRead > 0)
{
byte[] buffer = new byte[serialPort.BytesToRead];
await serialPort.BaseStream.ReadAsync(buffer, 0, buffer.Length);
ResponseFrame.AddRange(buffer);
if (CheckResponseFrame(ResponseFrame))
{
return ResponseFrame;
}
}
}
return null;
}
catch (Exception)
{
throw;
}
}
C-Mode实现
CmodeEndCode.cs
/// <summary>
/// 对比回复帧中的EndCode,看内容是否相符
/// </summary>
/// <param name="ResponseFrame">回复帧</param>
/// <returns>返回结束代码</returns>
public static string CatchEndCode(List<byte> ResponseFrame, int EndCodeAdr)
{
try
{
List<byte> ResponseEndCode = ResponseFrame.GetRange(EndCodeAdr, 2);
string EndCodeContents = null;
if (ResponseEndCode.SequenceEqual(new List<byte> { 0x30, 0x30 }))
{
EndCodeContents = "00";
}
else
{
foreach (var EndCodeMap in EndCodeMapSeq)
{
if (ResponseEndCode.SequenceEqual(EndCodeMap.Key))
{
EndCodeContents = EndCodeMap.Value;
break;
}
}
}
return EndCodeContents;
}
catch (Exception ex)
{
throw ex;
}
}
private static readonly Dictionary<List<byte>, string> EndCodeMapSeq = new Dictionary<List<byte>, string>
{
{new List<byte> { 0x30, 0x31 },"EndCode: 01; Contents: Not executable in RUN mode" },
{new List<byte> { 0x30, 0x32 },"EndCode: 02; Contents: Not executable in MONITOR mode" },
{new List<byte> { 0x30, 0x33 },"EndCode: 03; Contents: UM write-protected" },
{new List<byte> { 0x30, 0x34 },"EndCode: 04; Contents: Address over" },
{new List<byte> { 0x30, 0x42 },"EndCode: 0B; Contents: Not executable in PROGRAM mode" },
{new List<byte> { 0x31, 0x33 },"EndCode: 13; Contents: FCS error" },
{new List<byte> { 0x31, 0x34 },"EndCode: 14; Contents: Format error" },
{new List<byte> { 0x31, 0x35 },"EndCode: 15; Contents: Entry number data error" },
{new List<byte> { 0x31, 0x36 },"EndCode: 16; Contents: Command not supported" },
{new List<byte> { 0x31, 0x38 },"EndCode: 18; Contents: Frame length error" },
{new List<byte> { 0x31, 0x39 },"EndCode: 19; Contents: Not executable" },
{new List<byte> { 0x32, 0x30 },"EndCode: 20; Contents: Could not create I/O table" },
{new List<byte> { 0x32, 0x31 },"EndCode: 21; Contents: Not executable due to CPU Unit CPU error" },
{new List<byte> { 0x32, 0x33 },"EndCode: 23; Contents: User memory protected" },
{new List<byte> { 0x41, 0x33 },"EndCode: A3; Contents: Aborted due to FCS error in trans-mission data" },
{new List<byte> { 0x41, 0x34 },"EndCode: A4; Contents: Aborted due to format error in transmission data" },
{new List<byte> { 0x41, 0x35 },"EndCode: A5; Contents: Aborted due to entry number data error in transmission data" },
{new List<byte> { 0x41, 0x38 },"EndCode: A8; Contents: Aborted due to frame length error in transmission data" }
};
CmodeHeaderCode.cs
internal class CmodeHeaderCode
{
public static readonly byte[] HeaderCode_RR = { 0x52, 0x52 };
public static readonly byte[] HeaderCode_RD = { 0x52, 0x44 };
public static readonly byte[] HeaderCode_WR = { 0x57, 0x52 };
public static readonly byte[] HeaderCode_WD = { 0x57, 0x44 };
public static readonly byte[] HeaderCode_TS = { 0x54, 0x53 };
public static readonly byte[] HeaderCode_MS = { 0x4D, 0x53 };
public static readonly byte[] HeaderCode_SC = { 0x53, 0x43 };
}
功能实现的代码过长,请自行到通讯库项目Gitee 仓库查看吧
FINS-Mode实现
定义一个FinsResult的类用来接收所需要的信息
(目前通信库反馈的大部分数据都是Bool与String列表,所以里面分开成两个Datas)
FinsResult.cs
/// <summary>
/// Fins通信结果类
/// </summary>
public class FinsResult
{
/// <summary>
/// FINS通信状态
/// </summary>
public bool IsSuccessed { get; set; }
/// <summary>
/// FINS通信结果信息
/// </summary>
public string ResultMessage { get; set; }
/// <summary>
/// 通信命令帧
/// </summary>
public string CommandFrame { get; set; }
/// <summary>
/// 通信回复帧
/// </summary>
public string ResponseFrame { get; set; }
/// <summary>
/// 数据列表(bool类型)
/// </summary>
public List<bool> Datas_BoolList { get; set; }
/// <summary>
/// 数据列表(string类型)
/// </summary>
public string Datas_String { get; set; }
/// <summary>
/// 完整构造函数
/// </summary>
/// <param name="isSuccessed">FINS通信状态</param>
/// <param name="resultMessage">FINS通信结果信息</param>
/// <param name="commandFrame">通信命令帧</param>
/// <param name="responseFrame">通信回复帧</param>
/// <param name="datas">数据列表</param>
public FinsResult(bool isSuccessed, string resultMessage, string commandFrame, string responseFrame, List<bool> datas1, string datas2)
{
IsSuccessed = isSuccessed;
ResultMessage = resultMessage;
CommandFrame = commandFrame;
ResponseFrame = responseFrame;
Datas_BoolList = datas1;
Datas_String = datas2;
}
//五参数构造函数(带bool数据列表)
public FinsResult(bool isSuccessed, string resultMessage, string commandFrame, string responseFrame, List<bool> datas) :
this(isSuccessed, resultMessage, commandFrame, responseFrame, datas, null)
{ }
//五参数构造函数(带string数据列表)
public FinsResult(bool isSuccessed, string resultMessage, string commandFrame, string responseFrame, string datas) :
this(isSuccessed, resultMessage, commandFrame, responseFrame, null, datas)
{ }
//四参数构造函数(无数据反馈)
public FinsResult(bool isSuccessed, string resultMessage, string commandFrame, string responseFrame) :
this(isSuccessed, resultMessage, commandFrame, responseFrame, null, null)
{ }
//两参数构造函数(出错时返回)
public FinsResult(bool isSuccessed, string resultMessage) : this(isSuccessed, resultMessage, null, null, null, null) { }
}
通讯库定义了一些常用的内存区域枚举类,使用时可以提前设定好
FinsIOMemoryAreaAddress.cs
/// <summary>
/// FinsIO内存区域地址类
/// </summary>
public class FinsIOMemoryAreaAddress
{
/// <summary>
/// 内存区域代码
/// </summary>
public FinsMemoryAreaTypeEnum AreaType { get; set; }
/// <summary>
/// Word起始地址
/// </summary>
public ushort WordAddress { get; set; }
/// <summary>
/// Bit起始地址
/// </summary>
public ushort BitAddress { get; set; }
}
FinsMemoryAreaTypeEnum.cs
/// <summary>
/// Fins内存区域类型
/// </summary>
public enum FinsMemoryAreaTypeEnum
{
CIOBit,
CIOWord,
WRBit,
WRWord,
HRBit,
HRWord,
DMBit,
DMWord
}
FINS指令配置的代码如下
FinsFrameConfig.cs
public class FinsFrameConfig
{
public string ICF { get; set; }
public string RSV { get; set; }
public string GCT { get; set; }
public string DNA { get; set; }
public string DA1 { get; set; }
public string DA2 { get; set; }
public string SNA { get; set; }
public string SA1 { get; set; }
public string SA2 { get; set; }
public string SID { get; set; }
}
功能实现的代码过长,请自行到通讯库项目Gitee 仓库查看吧
C#控制台测试功能
HostLinkDevice.cs
public class HostLinkDevice
{
public HostLinkDevice(string portName, int baudRate, Parity parity, int dataBits, StopBits stopBits)
{
PLC = new HostLinkFinsDevice(portName, baudRate, parity, dataBits, stopBits);
}
//HostLinkFins设备
private HostLinkFinsDevice PLC;
//Fins帧参数设置
private static FinsFrameConfig finsFrameConfig = new FinsFrameConfig()
{
ICF = "00",
DA2 = "00",
SA2 = "00",
SID = "00"
};
/// <summary>
/// 串口打开
/// </summary>
public void Connect()
{
try
{
PLC.Connect();
}
catch (Exception)
{
throw;
}
}
/// <summary>
/// 串口关闭
/// </summary>
public void Disconnect()
{
try
{
PLC.DisConnect();
}
catch (Exception)
{
throw;
}
}
/// <summary>
/// 读取CIO区的连续Bit位方法(异步方法)
/// </summary>
/// <param name="WordAdr">读取起始Word地址</param>
/// <param name="BitAdr">读取起始Bit地址</param>
/// <param name="ReadCount">读取Bit位数量</param>
/// <returns>返回通信结果的信息</returns>
public async Task<List<bool>> ReadCIOBitAsync(ushort WordAdr, ushort BitAdr, ushort ReadCount)
{
try
{
FinsResult finsResult;
//IO内存区域设置
FinsIOMemoryAreaAddress IOMemoryAreaAdr = new FinsIOMemoryAreaAddress()
{
AreaType = FinsMemoryAreaTypeEnum.CIOBit,
WordAddress = WordAdr,
BitAddress = BitAdr
};
//获取FINS通信结果
finsResult = await PLC.Read_MemoryAreaAsync(IOMemoryAreaAdr, finsFrameConfig, ReadCount);
if (finsResult.IsSuccessed)
{
if (finsResult.ResultMessage.Equals("OK"))
{
return finsResult.Datas_BoolList;
}
else
{
throw new Exception($"{finsResult.ResultMessage}{Environment.NewLine}{Environment.NewLine}发送命令帧:{finsResult.CommandFrame}{Environment.NewLine}接收回复帧:{finsResult.ResponseFrame}");
}
}
else
{
throw new Exception($"{finsResult.ResultMessage}{Environment.NewLine}{Environment.NewLine}发送命令帧:{finsResult.CommandFrame}{Environment.NewLine}接收回复帧:{finsResult.ResponseFrame}");
}
}
catch (Exception)
{
throw;
}
}
/// <summary>
/// 读取W区的连续Bit位方法(异步方法)
/// </summary>
/// <param name="WordAdr">读取起始Word地址</param>
/// <param name="BitAdr">读取起始Bit地址</param>
/// <param name="ReadCount">读取Bit位数量</param>
/// <returns>返回通信结果的信息</returns>
public async Task<List<bool>> ReadWRBitAsync(ushort WordAdr, ushort BitAdr, ushort ReadCount)
{
try
{
FinsResult finsResult;
//IO内存区域设置
FinsIOMemoryAreaAddress IOMemoryAreaAdr = new FinsIOMemoryAreaAddress()
{
AreaType = FinsMemoryAreaTypeEnum.WRBit,
WordAddress = WordAdr,
BitAddress = BitAdr
};
//获取FINS通信结果
finsResult = await PLC.Read_MemoryAreaAsync(IOMemoryAreaAdr, finsFrameConfig, ReadCount);
if (finsResult.IsSuccessed)
{
if (finsResult.ResultMessage.Equals("OK"))
{
return finsResult.Datas_BoolList;
}
else
{
throw new Exception($"{finsResult.ResultMessage}{Environment.NewLine}{Environment.NewLine}发送命令帧:{finsResult.CommandFrame}{Environment.NewLine}接收回复帧:{finsResult.ResponseFrame}");
}
}
else
{
throw new Exception($"{finsResult.ResultMessage}{Environment.NewLine}{Environment.NewLine}发送命令帧:{finsResult.CommandFrame}{Environment.NewLine}接收回复帧:{finsResult.ResponseFrame}");
}
}
catch (Exception)
{
throw;
}
}
/// <summary>
/// 写入W区的连续Bit位方法(异步方法)
/// </summary>
/// <param name="WordAdr">写入起始Word地址</param>
/// <param name="BitAdr">写入起始Bit地址</param>
/// <param name="WriteCount">写入Bit位数量</param>
/// <param name="WriteData">写入数据</param>
/// <returns>返回通信结果的信息</returns>
public async Task<string> WriteWRBitAsync(ushort WordAdr, ushort BitAdr, ushort WriteCount, string WriteData)
{
try
{
FinsResult finsResult;
//IO内存区域设置
FinsIOMemoryAreaAddress IOMemoryAreaAdr = new FinsIOMemoryAreaAddress()
{
AreaType = FinsMemoryAreaTypeEnum.WRBit,
WordAddress = WordAdr,
BitAddress = BitAdr
};
//获取FINS通信结果
finsResult = await PLC.Write_MemoryAreaAsync(IOMemoryAreaAdr, finsFrameConfig, WriteCount, WriteData);
if (finsResult.IsSuccessed)
{
return finsResult.ResultMessage;
}
else
{
throw new Exception($"{finsResult.ResultMessage}{Environment.NewLine}{Environment.NewLine}发送命令帧:{finsResult.CommandFrame}{Environment.NewLine}接收回复帧:{finsResult.ResponseFrame}");
}
}
catch (Exception)
{
throw;
}
}
}
Program.cs
internal class Program
{
static async Task Main(string[] args)
{
#region C-Mode方式
HostLinkCmodeDevice plc1 = new HostLinkCmodeDevice("COM5", 115200, Parity.None, 8, StopBits.One);
SemaphoreSlim semaphoreSlim_Comm1 = new SemaphoreSlim(1, 1);
plc1.Connect();
var Task1 = Task.Run(async () =>
{
await semaphoreSlim_Comm1.WaitAsync();
Stopwatch stopwatch1 = new Stopwatch();
stopwatch1.Start();
string str1 = await plc1.TestCommandAsync("123123");
stopwatch1.Stop();
Console.WriteLine("TestCommand:");
Console.WriteLine(str1);
Console.WriteLine($"花费时间:{stopwatch1.ElapsedMilliseconds}ms");
semaphoreSlim_Comm1.Release();
});
var Task2 = Task.Run(async () =>
{
await semaphoreSlim_Comm1.WaitAsync();
Stopwatch stopwatch1 = new Stopwatch();
stopwatch1.Start();
string str1 = await plc1.Read_DMAreaAsync(0, 3);
stopwatch1.Stop();
Console.WriteLine("ReadDM:");
Console.WriteLine(str1);
Console.WriteLine($"花费时间:{stopwatch1.ElapsedMilliseconds}ms");
semaphoreSlim_Comm1.Release();
});
await Task.WhenAll(Task1, Task2);
plc1.DisConnect();
semaphoreSlim_Comm1.Dispose();
#endregion
#region FINS-Mode方式
//HostLinkDevice plc2 = new HostLinkDevice("COM5", 115200, Parity.None, 8, StopBits.One);
//SemaphoreSlim semaphoreSlim_Comm2 = new SemaphoreSlim(1, 1);
//plc2.Connect();
//var Task3 = Task.Run(async () =>
//{
// await semaphoreSlim_Comm2.WaitAsync();
// Stopwatch stopwatch2 = new Stopwatch();
// stopwatch2.Start();
// var list1 = await plc2.ReadCIOBitAsync(100, 0, 3);
// stopwatch2.Stop();
// Console.WriteLine("Read CIOBit:");
// foreach (var item in list1)
// {
// Console.WriteLine(item);
// }
// Console.WriteLine($"花费时间:{stopwatch2.ElapsedMilliseconds}ms");
// semaphoreSlim_Comm2.Release();
//});
//var Task4 = Task.Run(async () =>
//{
// await semaphoreSlim_Comm2.WaitAsync();
// Stopwatch stopwatch2 = new Stopwatch();
// stopwatch2.Start();
// var list1 = await plc2.ReadWRBitAsync(0, 0, 3);
// stopwatch2.Stop();
// Console.WriteLine("Read WRBit:");
// foreach (var item in list1)
// {
// Console.WriteLine(item);
// }
// Console.WriteLine($"花费时间:{stopwatch2.ElapsedMilliseconds}ms");
// semaphoreSlim_Comm2.Release();
//});
//var Task5 = Task.Run(async () =>
//{
// await semaphoreSlim_Comm2.WaitAsync();
// Stopwatch stopwatch2 = new Stopwatch();
// stopwatch2.Start();
// var list1 = await plc2.WriteWRBitAsync(0, 0, 3, "000100");
// stopwatch2.Stop();
// Console.WriteLine("Write WRBit:");
// Console.WriteLine(list1);
// Console.WriteLine($"花费时间:{stopwatch2.ElapsedMilliseconds}ms");
// semaphoreSlim_Comm2.Release();
//});
//await Task.WhenAll(Task3, Task4, Task5);
//plc2.Disconnect();
//semaphoreSlim_Comm2.Dispose();
#endregion
Console.ReadKey();
}
}
具体项目请自行到控制台测试项目Gitee 仓库查看吧
测试结果
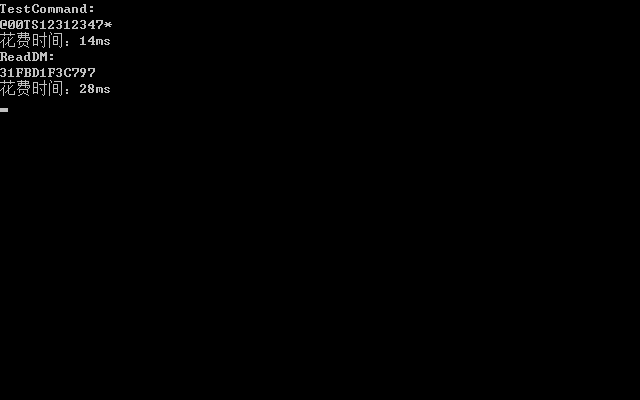
控制台输出图如下:
C-Mode方式
FINS-Mode方式
C#实现欧姆龙 HostLink 通讯协议库的更多相关文章
- 欧姆龙plc通讯协议格式
欧姆龙CPM1A型plc与上位计算机通信的顺序是上位机先发出命令信息给PLC,PLC返回响应信息给上位 机.每次通信发送/接受的一组数据称为一"帧".帧由少于131个字符的数据构成 ...
- 【转】常用PLC通讯协议
三菱FX系列PLC通讯测试 发送帧(Hex): 起始(STX) 02 命令(CMD) 30 首地址(ADDRESS) 30 30 41 30 字节数(BYTES) 30 31 终止(ETX) 03 校 ...
- HslCommunication库的二次协议扩展,适配第三方通讯协议开发,基础框架支持长短连接模式
本文将使用一个gitHub开源的项目来扩展实现二次协议的开发,该项目已经搭建好了基础层架构,并实现了三菱,西门子,欧姆龙,MODBUS-TCP的通讯示例,也可以参照这些示例开发其他的通讯协议,并Pul ...
- 使用delphi 开发多层应用(十六)使用XMLRPC 实现basic4android 远程调用RTC服务(讲述了RTC的特点,其底层通讯协议是自己封装SOCK 库,与kbmmw 的适合场合不完全一样)
RealThinClient (以下简称RTC) 也是一款delphi 多层开发的框架,由于其底层通讯协议是自己封装SOCK 库,抛弃了 大家诟病的indy,因此表现的非常稳定,效率也非常高, ...
- 2018-2019-1-20165221&20165225 《信息安全系统设计》实验五:通讯协议设计
2018-2019-1-20165221&20165225 <信息安全系统设计>-实验五:通讯协议设计 OpenSSL学习: 简介: OpenSSL是为网络通信提供安全及数据完整性 ...
- Mavlink - 无人机通讯协议
http://qgroundcontrol.org/mavlink/start mavlink协议介绍https://pixhawk.ethz.ch/mavlink/ 消息简介 MAVLink简介 M ...
- MQTT是IBM开发的一个即时通讯协议,构建于TCP/IP协议上,是物联网IoT的订阅协议,借助消息推送功能,可以更好地实现远程控制
最近一直做物联网方面的开发,以下内容关于使用MQTT过程中遇到问题的记录以及需要掌握的机制原理,主要讲解理论. 背景 MQTT是IBM开发的一个即时通讯协议.MQTT构建于TCP/IP协议上,面向M2 ...
- 基于dubbo框架下的RPC通讯协议性能测试
一.前言 Dubbo RPC服务框架支持丰富的传输协议.序列化方式等通讯相关的配置和扩展.dubbo执行一次RPC请求的过程大致如下:消费者(Consumer)向注册中心(Registry)执行RPC ...
- MODBUS-RTU通讯协议简介
MODBUS-RTU通讯协议简介 什么是MODBUS? MODBUS 是MODICON公司最先倡导的一种软的通讯规约,经过大多数公司 的实际应用,逐渐被认可,成为一种标准的通讯规约,只要按照这种规 ...
- 【读书笔记】iOS-防止通讯协议被轻易破解的方法
开发者可以选择类似Protobuf之类的二进制通讯协议或者自己实现通讯协议,对于传输的内容进行一定程度的加密,以增加黑客破解协议的难度. 参考资料: <iOS开发进阶> --唐巧
随机推荐
- laravel-admin php artisan admin:install报错问题解决办法
问题描述:根据laravel-admin官方文档安装步骤,执行:php artisan admin:install 安装时报错. 其实是数据库创建特殊字符过长问题,laravel 5.4 改变了默认的 ...
- nginx: [error] open() "/usr/local/nginx/nginx.pid" failed (2: No such file or directory)
nginx 启动出现错误 nginx: [error] open() "/usr/local/nginx/nginx.pid" failed (2: No such file or ...
- 【WPF开发】HandyControl Growl控件Error通知不自动消失的问题
需求 HandyControl Growl在Error类型的通知不自动消失,此时需要他跟其他的统一. 找寻原因 那么翻翻代码看看为啥不消失呗 1.这是决定关闭通知的计时器 2.这是通过_staysOp ...
- centos安装JDK11
(一)建立目录 mkdir /home/jdk11 (二) 上传JDK的离线liunx包 cd /home/jdk11 示例:jdk-11.0.19_linux-x64_bin.tar.gz (三) ...
- 分布式一致性算法-Paxos、Raft、ZAB、Gossip
为什么需要一致性 数据不能存在单个节点(主机)上,否则可能出现单点故障. 多个节点(主机)需要保证具有相同的数据. 一致性算法就是为了解决上面两个问题. 一致性算法的定义 一致性就是数据保持一致, ...
- MySQL 事务隔离级别:社交恐惧症的四个阶段
MySQL 事务隔离级别:社交恐惧症的四个阶段 在数据库的世界里,数据们也有社交问题!事务隔离级别就是控制它们互相看到对方的程度... 什么是事务隔离? 想象一下,数据库是一个繁忙的餐厅,每个事务都是 ...
- 阿里云ECS下安装的MySQL无法远程连接?
场景重现 在阿里云ECS下, Ubuntu系统上通过以下命令安装的MySQL数据库, 本地连接正常, 但远程死活连接不上. # 安装MySQL apt-get install mysql-server ...
- CH9120 TFTP使用详解
一.TFTP简介: TFTP是基于UDP应用层的简单的文件传输协议,端口号为69,TFTP协议主要应用于网络引导.配置文件传输等场景. 二.报文介绍: TFTP有四种数据包格式,分别是读/写请求包.文 ...
- CH39x产品介绍
CH39x产品介绍 芯片 CH392 CH395 CH390 接口 异步串口/SPI 异步串口/SPI/8位并口(仅CH395L支持) SPI/16位或8位并口(仅CH390L支持) 网口速率 10M ...
- 探秘Transformer系列之(25)--- KV Cache优化之处理长文本序列
探秘Transformer系列之(25)--- KV Cache优化之处理长文本序列 目录 探秘Transformer系列之(25)--- KV Cache优化之处理长文本序列 0x00 概述 0x0 ...