ZYNQ入门实例——三种GPIO应用、中断系统及软硬件交叉触发调试
一、前言
Xlinx的ZYNQ系列SOC集成了APU、各种专用外设资源和传统的FPGA逻辑,为ARM+FPGA的应用提供助力,降低功耗和硬件设计难度的同时极大提高两者间传输的带宽。之前在研究生课题中使用过ZYNQ搭建环路系统对算法进行板级验证,但并没有深入使用和理解这个异构平台,今天算是对入门的总结。一款SOC的入门必然是GPIO的使用,而中断则是MCU能保证实时性的必杀武器。硬件调试难度高一直是FPGA的痛点,集成ARM的FPGA更是如此,cross-trigger调试有效地解决了这一问题,所以它也作为入门ZYNQ的必要技能。
二、硬件系统搭建
ZYNQ的三种GPIO分别是MIO、EMIO和AXI-GPIO。PS部分直接连接到芯片引脚的IO叫MIO,经过FPGA再连接到引脚的是EMIO。EMIO可以通过硬件约束指定不同的端口号和电压标准,提高了ARM IO的灵活性。而AXI-GPIO相当于是对ARM IO的补充,通过调用AXI-GPIO IP核与外部通信。以下通过一个实例来说明三种IO的使用方式。
系统功能:使用一个MIO使连接其上的LED闪烁,使用8个EMIO同样与LED连接构成流水灯效果,另外再调用一个5bit位宽的AXI-GPIO IP核以终端模式响应电路板上5个按键。
平台:米联客 MIZ702N (ZYNQ-7020)
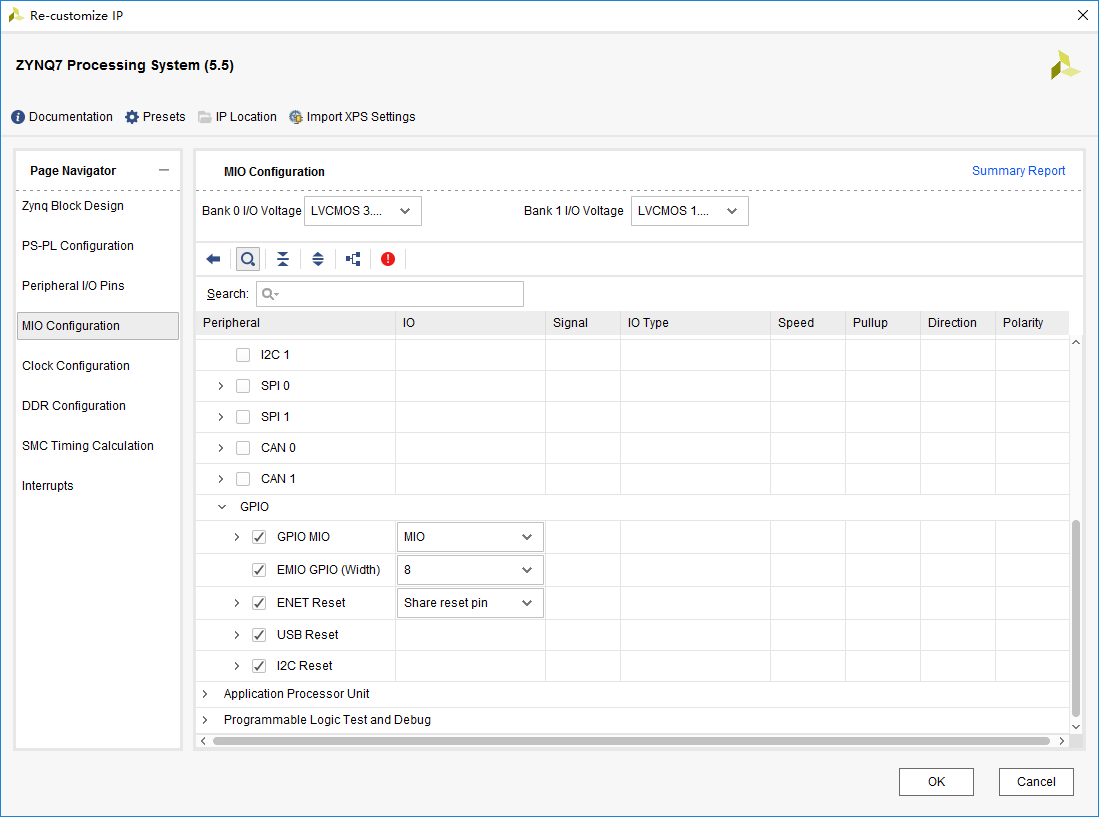
配置ZYNQ IP,使能MIO和EMIO,配置EMIO位宽是8bit。
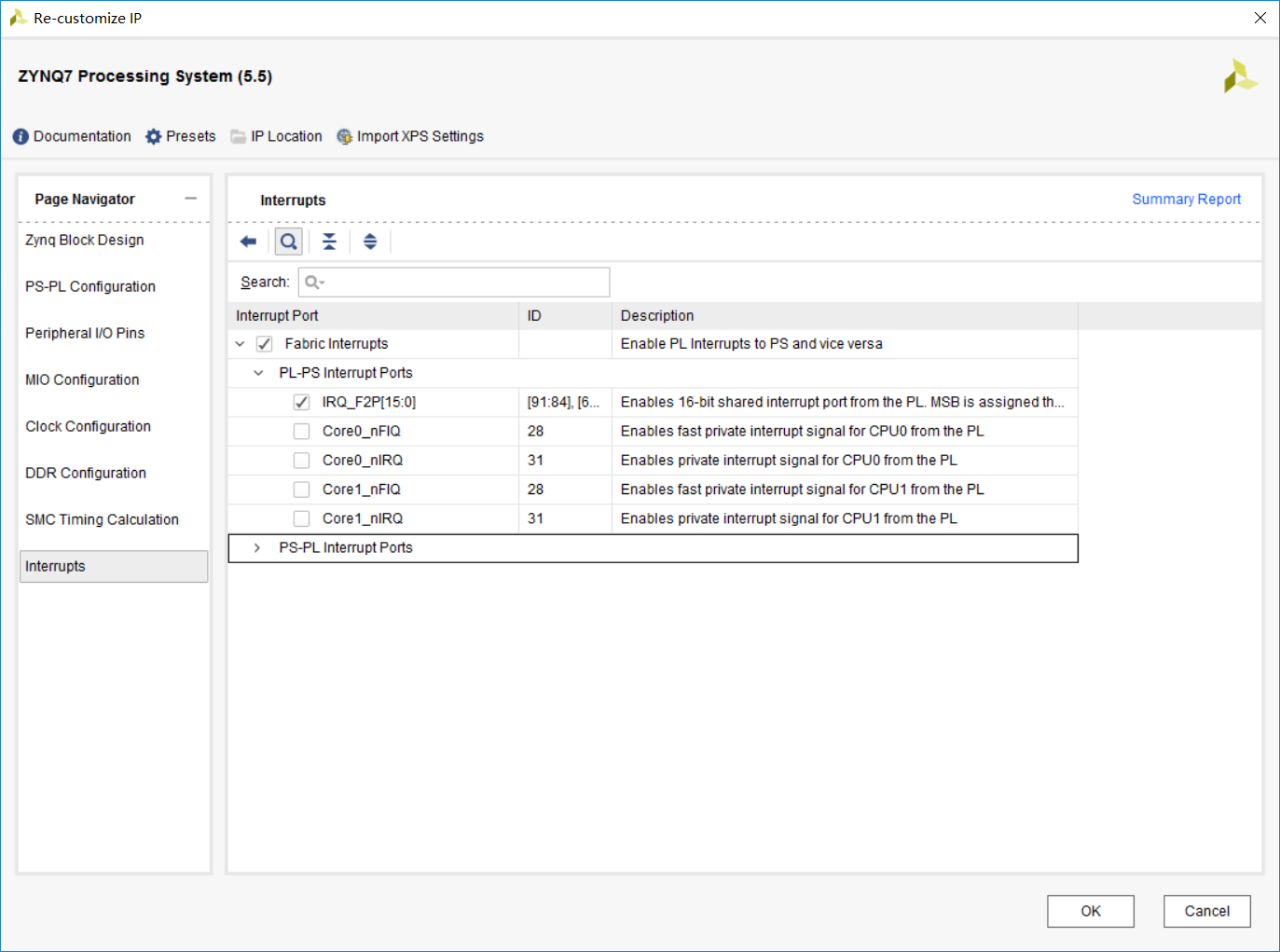
使能Cross Trigger和共享中断。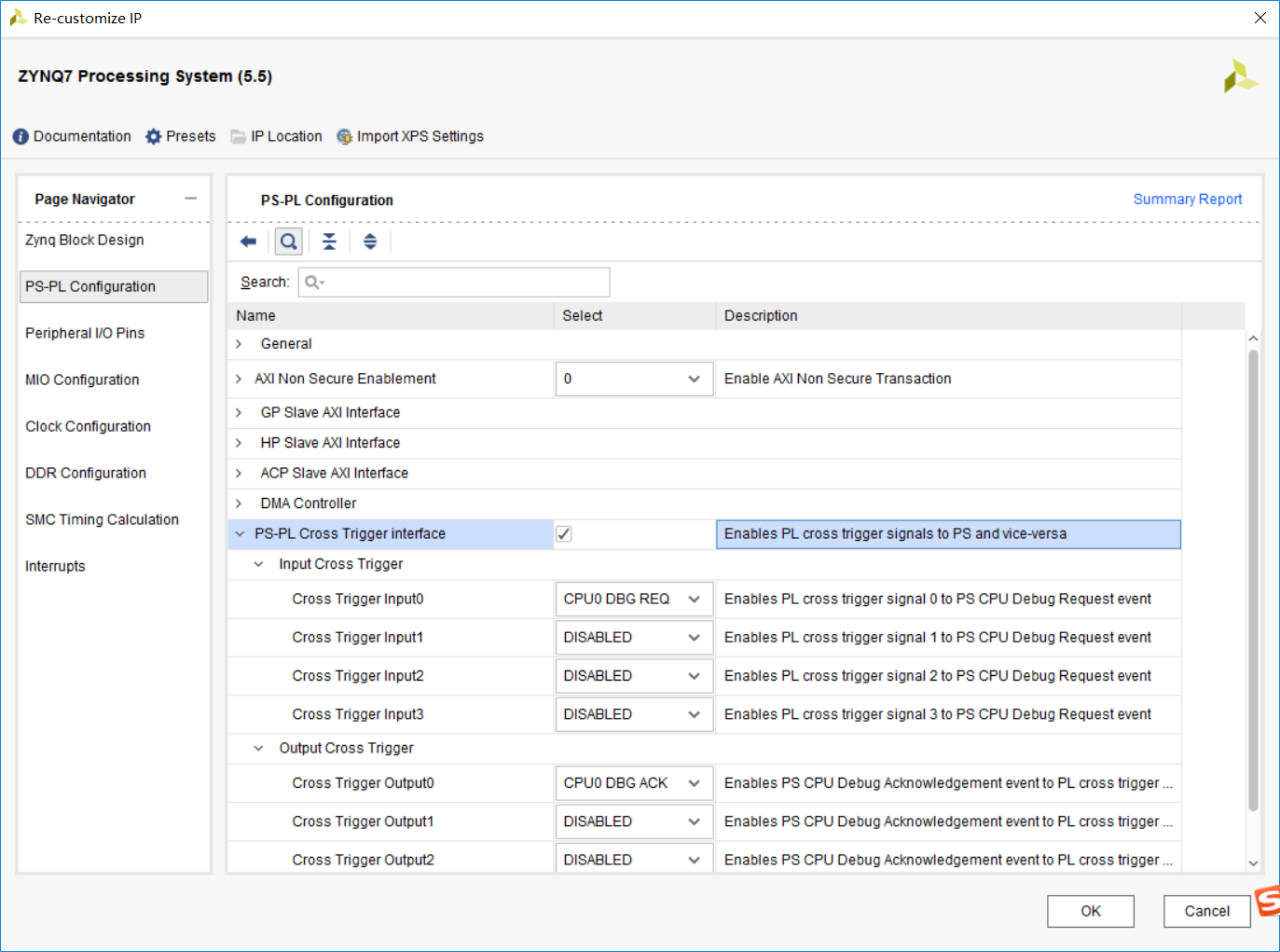
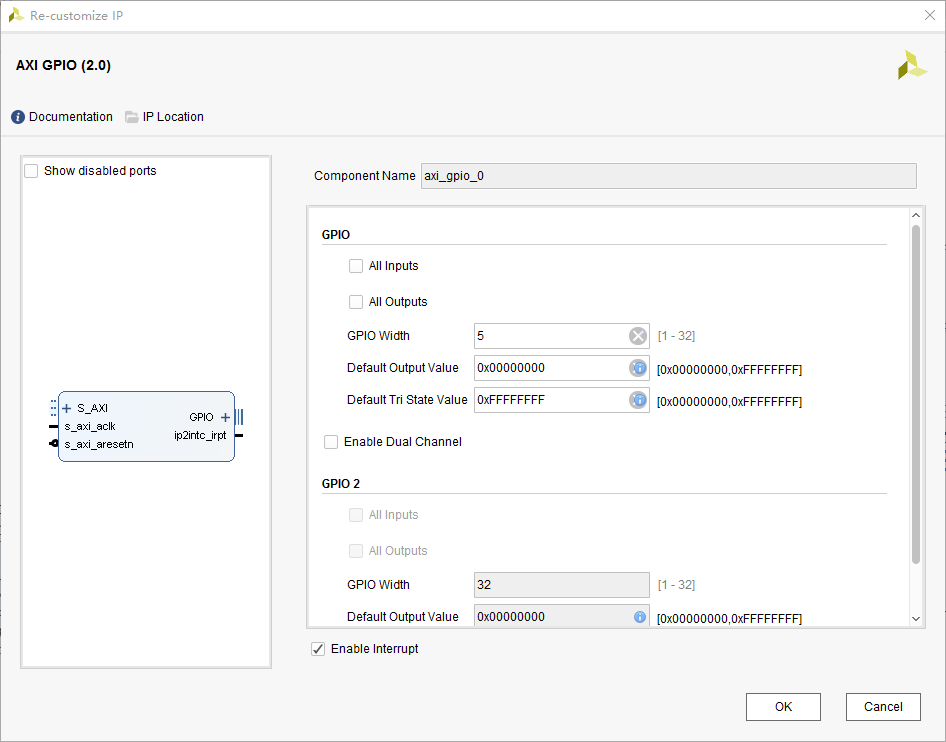
之后添加AXI-GPIO IP Core,配置位宽并使能其中断功能:
运行Run Automatic Connection最终block design系统结构:
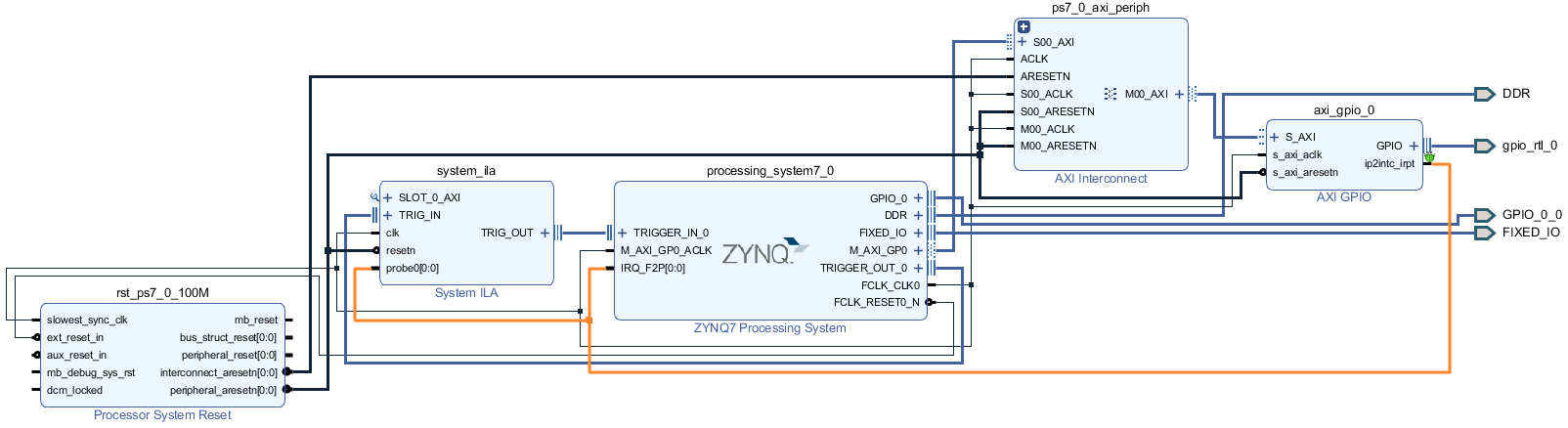
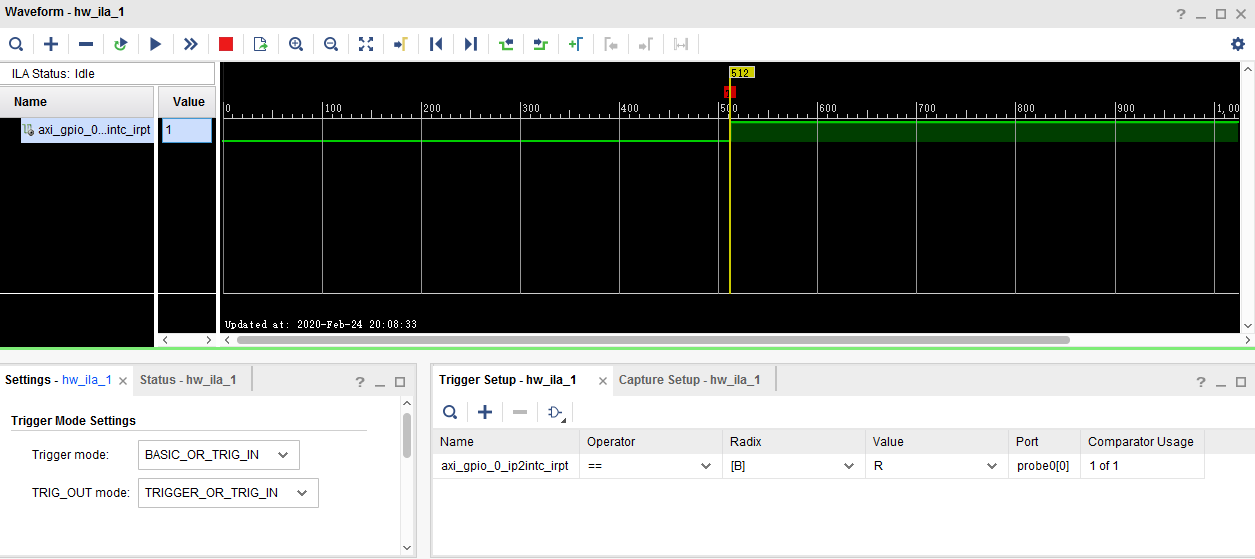
这里使用ILA抓取AXI-GPIO的中断信号。
三、软件编程与AXI-GPIO中断模式解析
Implementation,export hardware with bitstream, launch SDK. BSP中自带了硬件系统所使用到的IP的一些示例代码和文档,为入门提供了很好的帮助。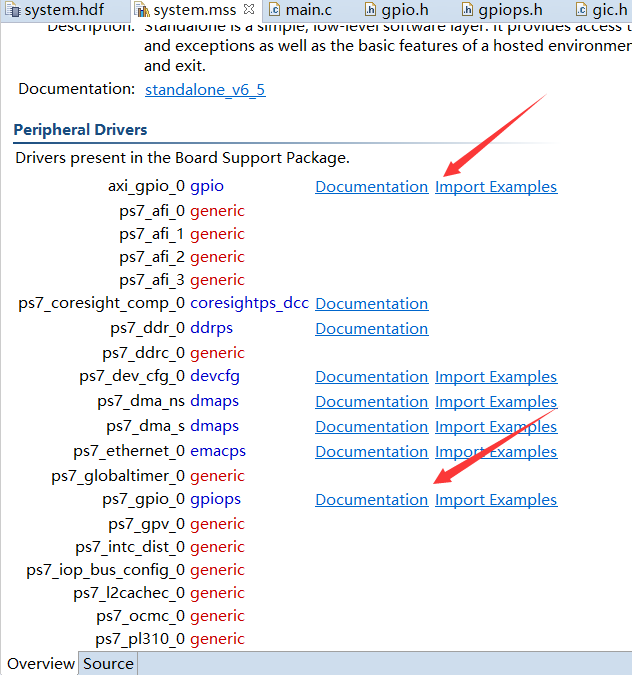
为了方便复用,对Xilinx提供的API做进一步封装,生成gpiops.h gpiops.c gpio.h gpio.c和gic.h文件。接下来重点讲述GIC相关的代码原理。若要使用中断系统,首先要初始化GIC,和其他IP一样包括查找配置和初始赋值两个步骤,分别由LookupConfig和CfgInitialize两个函数完成。后者实际上初始化了中断处理句柄使其指向了一个空结构。要理解内部原理,需要弄清楚XScuGic的数据结构。

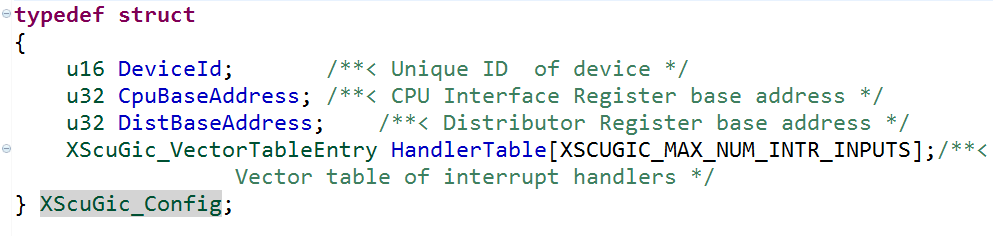
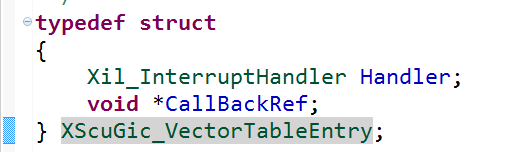

其中Handler实际上是一个函数指针类型,用于定义中断产生时的回调函数。而CallBackRef用于传入InstancePtr,即Gic Instance Pointer。GIC初始化完,要将GIC与中断ID和自定义中断回调函数绑定。
内部的核心代码依然和初始化时一致,只不过换成了输入参数:

下一步该使能中断了,一方面是使用GIC对GPIO中断ID的响应,另一方面是使能AXI-GPIO的中断信号。最后是系统对异常的处理函数,这里将其封装在exception_enable中:

总结来看,中断系统建立的步骤为:
1 初始化GIC
2 连接GIC与中断ID和回调函数
3 使能中断
4 使能异常处理
那么为什么完成上述操作后,中断事件发生会立即执行自定义中断回调函数GpioHandler呢?CPU会将中断向量表存储在特定的寄存器中,读取该寄存器可以获取中断向量表内容,里边存放着各个中断ID对应的中断函数入口地址。跳转指令则有中断控制器完成。
接下来是各个文件的软件代码:
/*
* main.c
*
* Created on: 2020年2月22日
* Author: s
*/ #include "xparameters.h" #include "xstatus.h"
#include <xil_printf.h>
#include "sleep.h" #include "gpiops.h"
#include "gpio.h"
#include "gic.h" XGpioPs GpioPs; /* The driver instance for GPIO Device. */
XGpio Gpio;
XScuGic Intc; /* The Instance of the Interrupt Controller Driver */ #define printf xil_printf /* Smalller foot-print printf */ #define LOOP_NUM 8 static u32 MIO_OUT_PIN_INDEX =; /* LED button */
static u32 EMIO_OUT_PIN_BASE_INDEX = ;
volatile u32 IntrFlag; /* Interrupt Handler Flag */ void GpioHandler(void *CallbackRef);
int setupIntSystem(XScuGic *IntcInstancePtr,XGpio *gpioInstancePtr
,u32 IntrId); int main()
{
int Status;
u8 i=;
u32 sys_led_out=0x1; Status = gpiops_initialize(&GpioPs,GPIOPS_DEVICE_ID);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
} Status = gpio_initialize(&Gpio,GPIO_DEVICE_ID);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
} /*
* Set the direction for the pin to be output and
* Enable the Output enable for the LED Pin.
*/
gpiops_setOutput(&GpioPs,MIO_OUT_PIN_INDEX); for(i=;i<LOOP_NUM;i++){
gpiops_setOutput(&GpioPs,EMIO_OUT_PIN_BASE_INDEX+i);
} gpio_setDirect(&Gpio, ,GPIO_CHANNEL1); Status = setupIntSystem(&Intc,&Gpio,INTC_GPIO_INTERRUPT_ID);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
} printf("Initialization finish.\n"); while(){ for(i=;i<LOOP_NUM;i++){
/* Set the GPIO output to be low. */
gpiops_outputValue(&GpioPs, EMIO_OUT_PIN_BASE_INDEX+i, 0x1);
usleep(*);
gpiops_outputValue(&GpioPs, EMIO_OUT_PIN_BASE_INDEX+i, 0x0);
} gpiops_outputValue(&GpioPs, MIO_OUT_PIN_INDEX, sys_led_out);
sys_led_out = sys_led_out == 0x0 ? 0x1 : 0x0;
}
return ;
} int setupIntSystem(XScuGic *IntcInstancePtr,XGpio *gpioInstancePtr
,u32 IntrId)
{
int Result;
/*
* Initialize the interrupt controller driver so that it is ready to
* use.
*/ Result = gic_initialize(&Intc,INTC_DEVICE_ID);
if (Result != XST_SUCCESS) {
return XST_FAILURE;
} XScuGic_SetPriorityTriggerType(IntcInstancePtr, IntrId,
0xA0, 0x3); /*
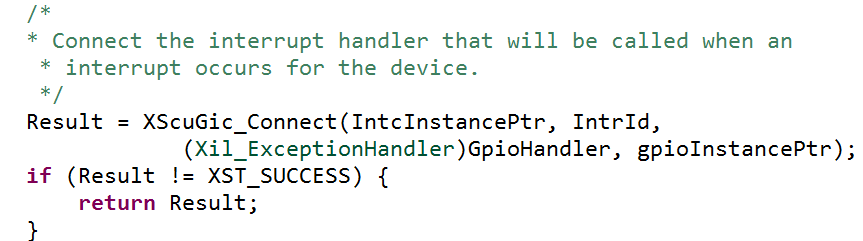
* Connect the interrupt handler that will be called when an
* interrupt occurs for the device.
*/
Result = XScuGic_Connect(IntcInstancePtr, IntrId,
(Xil_ExceptionHandler)GpioHandler, gpioInstancePtr);
if (Result != XST_SUCCESS) {
return Result;
} /* Enable the interrupt for the GPIO device.*/
XScuGic_Enable(IntcInstancePtr, IntrId); /*
* Enable the GPIO channel interrupts so that push button can be
* detected and enable interrupts for the GPIO device
*/
XGpio_InterruptEnable(gpioInstancePtr,GPIO_CHANNEL1);
XGpio_InterruptGlobalEnable(gpioInstancePtr); /*
* Initialize the exception table and register the interrupt
* controller handler with the exception table
*/
exception_enable(&Intc); IntrFlag = ; return XST_SUCCESS;
} void GpioHandler(void *CallbackRef)
{
XGpio *GpioPtr = (XGpio *)CallbackRef;
u32 gpio_inputValue; /* Clear the Interrupt */
XGpio_InterruptClear(GpioPtr, GPIO_CHANNEL1);
printf("Input interrupt routine.\n"); //IntrFlag = 1;
gpio_inputValue = gpio_readValue(GpioPtr, );
switch(gpio_inputValue)
{
case :
printf("button up\n");
break;
case :
printf("button center\n");
break;
case :
printf("button left\n");
break;
case :
printf("button right\n");
break;
case :
print("button down\n");
break;
} }
main.c
/*
* gpio.h
*
* Created on: 2020年2月23日
* Author: s
*/ #ifndef SRC_GPIO_H_
#define SRC_GPIO_H_ #include "xgpio.h" #define GPIO_DEVICE_ID XPAR_GPIO_0_DEVICE_ID
#define INTC_GPIO_INTERRUPT_ID XPAR_FABRIC_AXI_GPIO_0_IP2INTC_IRPT_INTR
#define GPIO_CHANNEL1 0x1F int gpio_initialize(XGpio * InstancePtr, u16 DeviceId);
void gpio_setDirect(XGpio *InstancePtr, unsigned Channel,
u32 DirectionMask);
void gpio_outputValue(XGpio * InstancePtr, unsigned Channel, u32 Data);
u32 gpio_readValue(XGpio * InstancePtr, unsigned Channel);
#endif /* SRC_GPIO_H_ */
gpio.h
/*
* gpio.c
*
* Created on: 2020年2月23日
* Author: s
*/ #include "gpio.h" int gpio_initialize(XGpio * InstancePtr, u16 DeviceId)
{
return XGpio_Initialize(InstancePtr,DeviceId);
} void gpio_setDirect(XGpio *InstancePtr, unsigned Channel,
u32 DirectionMask)
{
XGpio_SetDataDirection(InstancePtr, Channel,
DirectionMask);
} void gpio_outputValue(XGpio * InstancePtr, unsigned Channel, u32 Data)
{
XGpio_DiscreteWrite(InstancePtr, Channel, Data);
} u32 gpio_readValue(XGpio * InstancePtr, unsigned Channel)
{
return XGpio_DiscreteRead(InstancePtr, Channel);
}
gpio.c
/*
* gpiops.c
*
* Created on: 2020年2月23日
* Author: s
*/ #include "gpiops.h" int gpiops_initialize(XGpioPs *InstancePtr,u16 DeviceId)
{
XGpioPs_Config *ConfigPtr; ConfigPtr = XGpioPs_LookupConfig(DeviceId);
return XGpioPs_CfgInitialize(InstancePtr, ConfigPtr,
ConfigPtr->BaseAddr);
} void gpiops_setOutput (XGpioPs *InstancePtr,u32 Pin)
{
XGpioPs_SetDirectionPin(InstancePtr, Pin, );
XGpioPs_SetOutputEnablePin(InstancePtr, Pin, );
} void gpiops_setInput(XGpioPs *InstancePtr,u32 Pin)
{
XGpioPs_SetDirectionPin(InstancePtr, Pin, );
} void gpiops_outputValue(XGpioPs *InstancePtr,u32 Pin,u32 Data)
{
XGpioPs_WritePin(InstancePtr, Pin, Data);
} u32 gpiops_readValue(XGpioPs *InstancePtr,u32 Pin)
{
/* Read the state of the data so that it can be verified. */
return XGpioPs_ReadPin(InstancePtr, Pin);
}
gpiops.c
/*
* gpio.h
*
* Created on: 2020年2月23日
* Author: s
*/ #ifndef SRC_GPIOPS_H_
#define SRC_GPIOPS_H_ #include "xgpiops.h" #define GPIOPS_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID int gpiops_initialize(XGpioPs *InstancePtr,u16 DeviceId);
void gpiops_setOutput (XGpioPs *InstancePtr,u32 Pin);
void gpiops_setInput(XGpioPs *InstancePtr,u32 Pin);
void gpiops_outputValue(XGpioPs *InstancePtr,u32 Pin,u32 Data);
u32 gpiops_readValue(XGpioPs *InstancePtr,u32 Pin); #endif /* SRC_GPIOPS_H_ */
gpiops.h
/*
* gic.h
*
* Created on: 2020年2月23日
* Author: s
*/ #ifndef SRC_GIC_H_
#define SRC_GIC_H_ #include "xscugic.h" #define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID s32 gic_initialize(XScuGic *InstancePtr,u16 DeviceId)
{
XScuGic_Config *IntcConfig; IntcConfig = XScuGic_LookupConfig(DeviceId);
if (NULL == IntcConfig) {
return XST_FAILURE;
} return XScuGic_CfgInitialize(InstancePtr, IntcConfig,
IntcConfig->CpuBaseAddress);
} void exception_enable(void *Data)
{
Xil_ExceptionInit();
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,
(Xil_ExceptionHandler)XScuGic_InterruptHandler, Data); /* Enable non-critical exceptions */
Xil_ExceptionEnable();
} #endif /* SRC_GIC_H_ */
gic.h
四、交叉触发调试
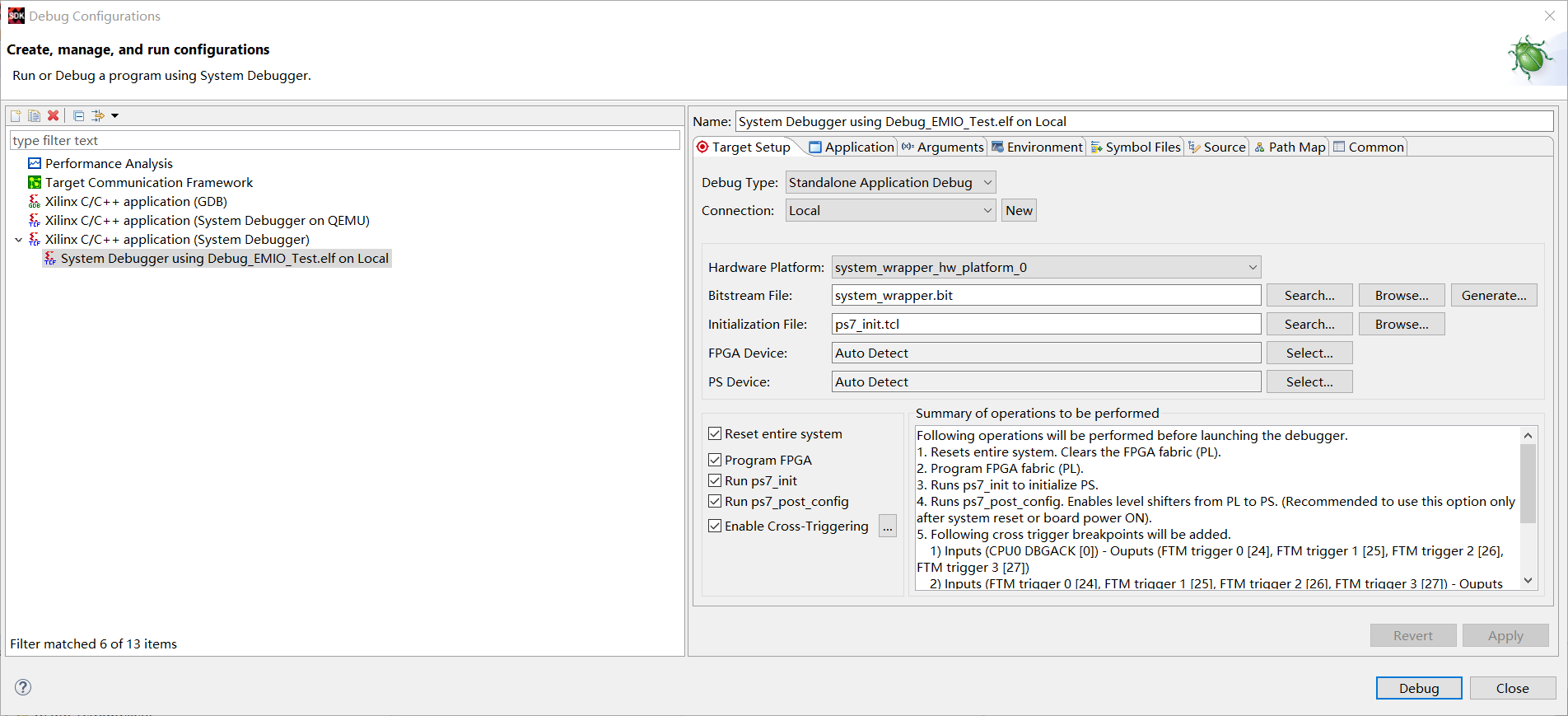
右键工程文件夹->Run As/Debug As分别用于代码下载和调试。SDK基于GDB提供了强大的调试能力,支持断点运行,可查看内部寄存器、地址数值以及汇编代码等。Debug As ->Debug Configuartion,双击System Debugger新建ELF文件。勾选Reset entire system和Program FPGA,因为ELF只是软件,硬件信息存储在bitstream中。最重要的是勾选enable cross-triggering。
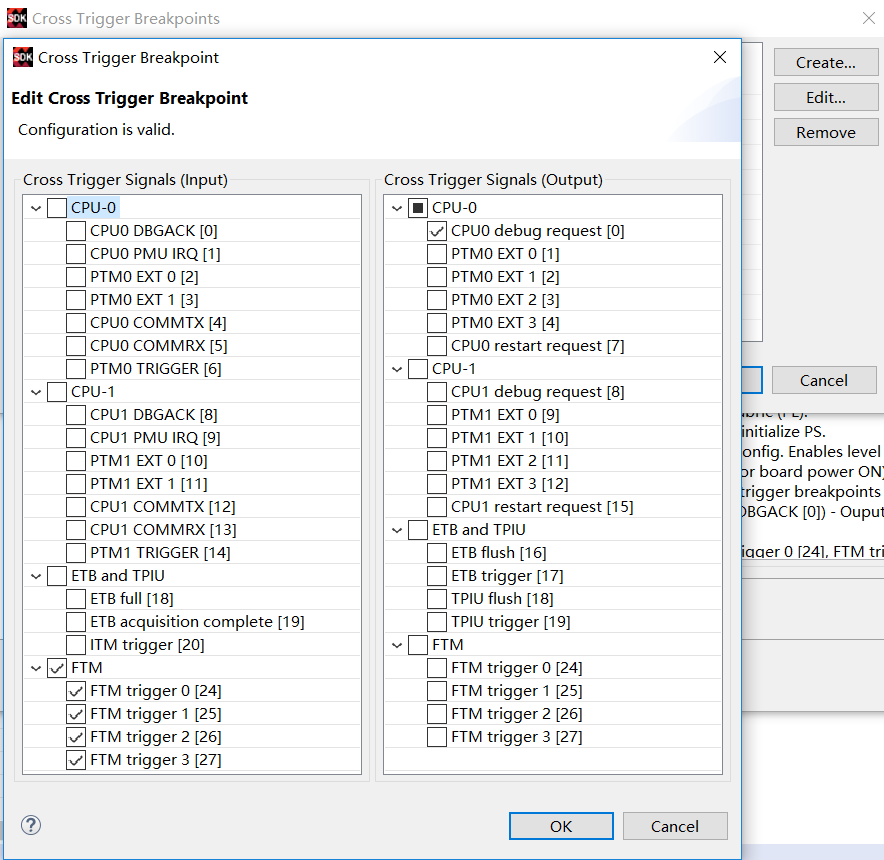
点击enable cross-triggering右侧的按钮,按照如下操作使能Processor to Fabric Trigger.

再次create使能Fabric to Processor Trigger:
最后点击Debug下载软硬件代码并进入调试界面。
1 首先尝试PS触发PL调试:
指定中断回调函数起始位置一个断点。然后进入VIVADO,打开Hardware Manager连接硬件。注意此时触发模式选择IN_ONLY。此时不用设置ILA抓取信号的触发条件,因为触发由PS端的PC控制。点击Run Trigger等待触发条件。这时回到SDK点击Resume按钮使代码开始运行。按下任意按键产生中断,此时软件代码运行到断点处停止,ILA随即抓取中断信号。

2 尝试PL触发PS调试:
这回在VIVADO中设置触发模式为OR_TRIG_IN,并启动触发条件为上升沿触发。按下按键,C运行到满足ILA触发条件时C代码立即停止,故PL控制了PS端的程序运行。
可以看到此时程序进入IRQHandler。
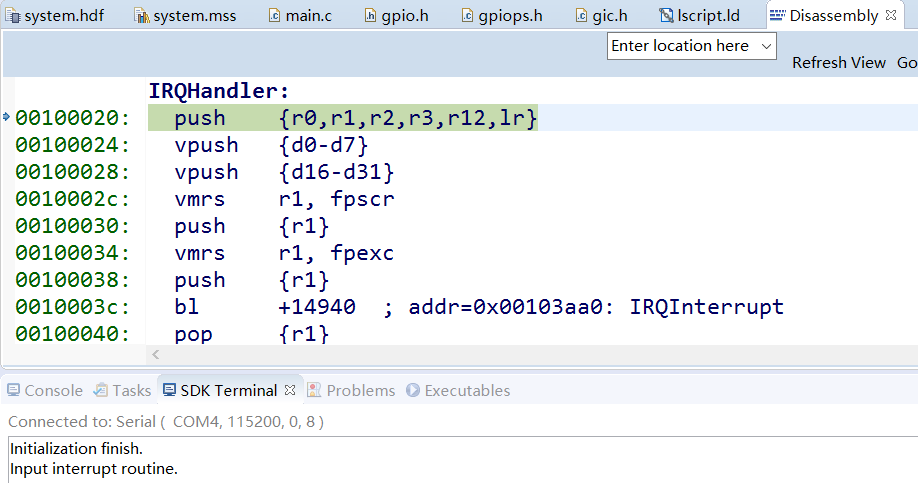
串口终端也打印进入中断函数的信息,正确响应中断。到此示例结束。本文虽是对ZYNQ入门的整理,但涉及到的东西很多,包括GPIO应用、中断系统建立和相应机制、调用AXI总线IP核、软件设计以及软硬件交叉触发调试流程。
ZYNQ入门实例——三种GPIO应用、中断系统及软硬件交叉触发调试的更多相关文章
- JdbcTemplae使用入门&&Spring三种连接池配置&&Spring配置文件引用外部properties文件
JdbcTemplate的使用 Spring为了各种支持的持久化技术,都提供了简单操作的模版和回调. JdbcTemplate 简化 JDBC 操作HibernateTemplate 简化 Hiber ...
- 第五篇 CSS入门 明白 三种嵌套形式,三种常用控制器
CSS入门 css是 层叠式样式表 css的作用是什么呢?举个抽象的例子啊,HTML是人,CSS则是衣服... css给html穿上衣服,有三种形式: 内嵌.内联.外联. 这三种形式,优先级为 ...
- springboot与dubbo整合入门(三种方式)
Springboot与Dubbo整合三种方式详解 整合环境: jdk:8.0 dubbo:2.6.2 springboot:2.1.5 项目结构: 1.搭建项目环境: (1)创建父项目与三个子项目,创 ...
- 【CC2530入门教程-03】CC2530的中断系统及外部中断应用
第3课 CC2530的中断系统及外部中断应用 广东职业技术学院 欧浩源 一.中断相关的基础概念 内核与外设之间的主要交互方式有两种:轮询和中断. 轮询的方式貌似公平,但实际工作效率很低,且不能及 ...
- [Linux]三种方案在Windows系统下安装ubuntu双系统(转)
在学习linux的过程中,ubuntu无疑是初学者的最佳选择. 下面来列举给Windows系统安装ubuntu双系统的三种方法. 一.虚拟机安装(不推荐) 使用工具:Vmware 如果不是因为迫不得已 ...
- 三种Dataase Mapping的系统架构
ORM - O/R M - Object/Relational Mapping: A technique/idea used to map objects and thier individual r ...
- 三种方案在Windows系统下安装ubuntu双系统
一.虚拟机安装(不推荐) 使用工具:Vmware 如果不是因为迫不得已,比如Mac OS对硬件不兼容,Federa安装频繁出错,各种驱动不全等等,不推荐使用虚拟机安装. 个人感觉这是一种对操作系统的亵 ...
- ZYNQ入门实例——定时器中断与程序固化
一.前言 APU系统中CPU以串行执行代码的方式完成操作,软件方式很难做到精准计时,因此调用内部定时器硬件完成计时是更好的选择.本文以定时器中断方式控制LED周期性闪烁为例学习私有定时器的使用.同时学 ...
- 登陆验证系统实例-三种(cookie,session,auth)
登陆验证 因为http协议是无状态协议,但是我们有时候需要这个状态,这个状态就是标识 前端提交from表单,后端获取对应输入值,与数据库对比,由此对象设置一个标识,该对象 在别的视图的时候,有此标识, ...
随机推荐
- 关于在读取excel的文件时候,放在服务器上就报路径错误
就是指定这个路径:C:\Program Files (x86)\IIS Express 因为在上传到服务器的时候,服务器读取的是在服务器上的路径,所以正确的思路应该是 把上传的Excel存在服务器上, ...
- Go 每日一库之 fsnotify
简介 上一篇文章Go 每日一库之 viper中,我们介绍了 viper 可以监听文件修改进而自动重新加载. 其内部使用的就是fsnotify这个库,它是跨平台的.今天我们就来介绍一下它. 快速使用 先 ...
- matplotlib 散点图
一.特点 离散的数据,查看分布规律,走向趋势 二.使用 1.核心 plt.scatter(x, y) # x为x轴的数据,可迭代对象,必须是数字 # y为y轴的数据,可迭代对象,必须是数字 # x和y ...
- Android studio 连接真机
首先用数据线连接真机 1.打开开发者模式(小米手机mix2s为例 设置->我的设备->全部参数->连续点击MIUI版本——开启成功) 2.在更多设置中找到系统安全设置——允许安装未知 ...
- 第二阶段冲刺个人任务——seven
今日任务: 整体运行测试上传到公网上的程序. 昨日成果: 搭建网络服务器,上传数据库及程序.
- URL方案最佳做法|高级路由特性 | 精通ASP-NET-MVC-5-弗瑞曼
使 URL整洁和人性化 GET(安全交互)和POST(不安全交互):选用正确的一个.
- 20191216 GXOI 2019模拟赛 逼死强迫症
题目传送门 分析: sb矩阵加速推一辈子... 想了1个小时,结果好像还和标准答案的方法不一样诶... 标算解法: 老套路,对于新加入的一列,考虑它与目前最后一列的关系 我们可以列出四种方案: 其中前 ...
- 团队项目-Beta冲刺3(七个小矮人)
团队项目-Beta冲刺3(七个小矮人) 一.格式描述 这个作业属于哪个课程 https://edu.cnblogs.com/campus/xnsy/GeographicInformationScien ...
- tarjan缩点练习 洛谷P3387 【模板】缩点+poj 2186 Popular Cows
缩点练习 洛谷 P3387 [模板]缩点 缩点 解题思路: 都说是模板了...先缩点把有环图转换成DAG 然后拓扑排序即可 #include <bits/stdc++.h> using n ...
- JVM基础快速入门篇
Java是一门可以跨平台的语言,但是Java本身是不可以实现跨平台的,需要JVM实现跨平台.javac编译好后的class文件,在Windows.Linux.Mac等系统上,只要该系统安装对应的Jav ...