teb_local_planner安装及使用
teb_local_planner的详尽资料(包括安装及导航,参数调节等)请参考其ros官方文档:http://wiki.ros.org/teb_local_planner和http://wiki.ros.org/teb_local_planner/Tutorials。
teb_local_planner的github源码:https://github.com/rst-tu-dortmund/teb_local_planner。
一、作用机制
teb_local_planner将navigation里的base_local_planner替换,故其作用机制和base_local_planner一样为ros的plugin机制。plugin的使用可以参考:http://www.cnblogs.com/W-chocolate/p/4328725.html。
二、teb_local_planner的安装步骤如下(注意ros为kenetic版):
1、安装依赖:
rosdep install teb_local_planner
2、从github上下载源码:https://github.com/rst-tu-dortmund/teb_local_planner
3、放入工作空间的/src文件夹中
4、catkin_make -DCATKIN_WHITELIST_PACKAGES=“源码存放的文件夹名字”(单独编译teb_local_planner)
5、查看teb_local_planner的plugin是否安装完成
rospack plugins --attrib=plugin nav_core
如果能查询到teb_local_planner,则表明以及准备就绪。
值得一提的是,teb_local_planner源码中关于plugin的配置文件均已写好,直接编译源码就能完成plugin的注册及插入,非常方便。
三、使用
1、新建teb_local_planner配置文件teb_local_planner_params.yaml
在此我偷了个懒,直接从tutorials中下载:
git clone https://github.com/rst-tu-dortmund/teb_local_planner_tutorials.git
在/cfg中找到所需的teb_local_planner_params.yaml。由于使用机器人odom为差动模式的,故选取diff_drive中的。
2、将teb_local_planner_params.yaml和navigation中其他的配置文件(如costmap_common_params.yaml等)放在一起,方便查阅调用。个人习惯如此,也可以不放在一起。
3、在启动navigation的launch文件中load上述配置文件
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
...
<rosparam file="$(find my_robot_name_2dnav)/base_local_planner_params.yaml" command="load" />
...
</node>
4、在启动navigation的launch文件中声明base_local_planner采用先前注册的plugin
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
...
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" />
...
</node>
当然也可以选择在move_base_params.yaml中声明。
5、启动navigation,在rviz中将三条path调出来,即可观察机器人导航过程中规划路径的变化。
此外,可以通过rosrun rqt_reconfigure rqt_reconfigure动态调节参数使机器人导航性能达到最佳。关于参数调节的方法请参考其ros官方文档。实际使用的经历来看,采用从teb_local_planner_tutorials下载下来的默认参数达到的性能已经远优于原始navigation中的路径规划算法的性能。我认为teb_local_planner的应用价值非常大。
四、异常处理
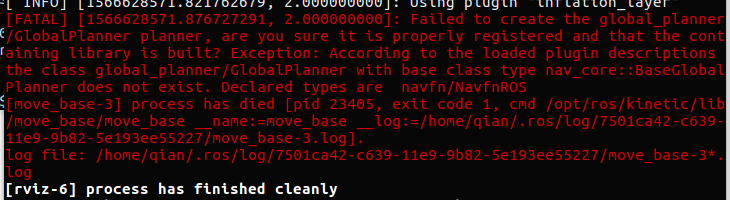
原因是相关库没有安装好,根据提示把库安装好就可以使用了。
解决办法,比较懒,没有一个个试试,所以直接都安装了,有兴趣的小伙伴可以尝试分部分,O(∩_∩)O哈哈~
sudo apt install ros-kinetic-mbf-costmap-core ros-kinetic-mbf-costmap-nav ros-kinetic-move-base-flex ros-kinetic-move-base-to-manip ros-kinetic-moveit-kinematics ros-kinetic-moveit-ros-manipulation ros-kinetic-moveit-ros-move-group ros-kinetic-moveit-ros-perception ros-kinetic-moveit-ros-planning ros-kinetic-moveit-ros-planning-interface ros-kinetic-moveit-ros-warehouse ros-kinetic-assisted-teleop ros-kinetic-carrot-planner ros-kinetic-dwa-local-planner ros-kinetic-global-planner ros-kinetic-goal-passer ros-kinetic-move-slow-and-clear ros-kinetic-navigation ros-kinetic-navigation-experimental ros-kinetic-navigation-layers ros-kinetic-navigation-stage ros-kinetic-navigation-tutorials ros-kinetic-pose-follower ros-kinetic-range-sensor-layer ros-kinetic-roomba-stage ros-kinetic-sbpl-lattice-planner ros-kinetic-sbpl-recovery ros-kinetic-social-navigation-layers ros-kinetic-twist-recovery ros-kinetic-assisted-teleop ros-kinetic-carrot-planner ros-kinetic-dwa-local-planner ros-kinetic-global-planner ros-kinetic-goal-passer ros-kinetic-move-slow-and-clear ros-kinetic-navigation ros-kinetic-navigation-experimental ros-kinetic-navigation-layers ros-kinetic-navigation-stage ros-kinetic-navigation-tutorials ros-kinetic-pose-follower ros-kinetic-range-sensor-layer ros-kinetic-roomba-stage ros-kinetic-sbpl-lattice-planner ros-kinetic-sbpl-recovery ros-kinetic-social-navigation-layers ros-kinetic-twist-recovery ros-kinetic-assisted-teleop ros-kinetic-carrot-planner ros-kinetic-dwa-local-planner ros-kinetic-global-planner ros-kinetic-goal-passer ros-kinetic-move-slow-and-clear ros-kinetic-navigation ros-kinetic-navigation-experimental ros-kinetic-navigation-layers ros-kinetic-navigation-stage ros-kinetic-navigation-tutorials ros-kinetic-pose-follower ros-kinetic-range-sensor-layer ros-kinetic-roomba-stage ros-kinetic-sbpl-lattice-planner ros-kinetic-sbpl-recovery ros-kinetic-social-navigation-layers ros-kinetic-twist-recovery ros-kinetic-cost-map ros-kinetic-cost-map-demos ros-kinetic-cost-map-ros ros-kinetic-cost-map-visualisations ros-kinetic-costmap-prohibition-layer ros-kinetic-grid-map-costmap-2d ros-kinetic-grid-map-cv ros-kinetic-grid-map-ros ros-kinetic-grid-map-visualization
teb_local_planner安装及使用的更多相关文章
- docker——容器安装tomcat
写在前面: 继续docker的学习,学习了docker的基本常用命令之后,我在docker上安装jdk,tomcat两个基本的java web工具,这里对操作流程记录一下. 软件准备: 1.jdk-7 ...
- 网络原因导致 npm 软件包 node-sass / gulp-sass 安装失败的处理办法
如果你正在构建一个基于 gulp 的前端自动化开发环境,那么极有可能会用到 gulp-sass ,由于网络原因你可能会安装失败,因为安装过程中部分细节会到亚马逊云服务器上获取文件.本文主要讨论在不变更 ...
- Sublime Text3安装JsHint
介绍 Sublime Text3使用jshint依赖Nodejs,SublimeLinter和Sublimelinter-jshint. NodeJs的安装省略. 安装SublimeLinter Su ...
- Fabio 安装和简单使用
Fabio(Go 语言):https://github.com/eBay/fabio Fabio 是一个快速.现代.zero-conf 负载均衡 HTTP(S) 路由器,用于部署 Consul 管理的 ...
- gentoo 安装
加载完光驱后 1进行ping命令查看网络是否通畅 2设置硬盘的标识为GPT(主要用于64位且启动模式为UEFI,还有一个是MBR,主要用于32位且启动模式为bois) parted -a optima ...
- Linux平台 Oracle 10gR2(10.2.0.5)RAC安装 Part3:db安装和升级
Linux平台 Oracle 10gR2(10.2.0.5)RAC安装 Part3:db安装和升级 环境:OEL 5.7 + Oracle 10.2.0.5 RAC 5.安装Database软件 5. ...
- Linux平台 Oracle 10gR2(10.2.0.5)RAC安装 Part1:准备工作
Linux平台 Oracle 10gR2(10.2.0.5)RAC安装 Part1:准备工作 环境:OEL 5.7 + Oracle 10.2.0.5 RAC 1.实施前准备工作 1.1 服务器安装操 ...
- 【原】nodejs全局安装和本地安装的区别
来微信支付有2年多了,从2年前的互联网模式转变为O2O模式,主要的场景是跟线下的商户去打交道,不像以往的互联网模式,有产品经理提需求,我们帮忙去解决问题. 转型后是这样的,团队成员更多需要去寻找业务的 ...
- tLinux 2.2下安装Mono 4.8
Tlinux2.2发行版基于CentOS 7.2.1511研发而成,内核版本与Tlinux2.0发行版保持完全一致,更加稳定,并保持对Tlinux2.0的完全兼容.Mono 4版本要求CentOS 7 ...
随机推荐
- js drag drop 收藏夹拖拽移除的简单例子
代码 <!DOCTYPE html> <html> <head> <meta charset="utf-8"> <title& ...
- pip3 常用操作
清华大学pip镜像 https://mirrors.tuna.tsinghua.edu.cn/help/pypi/ # 设置为默认 pip install pip -U pip config set ...
- 反编译字节码角度分析synchronized关键字的原理
1.synchronized介绍 synchronized是java关键字.JVM规范中,synchronized关键字用于在线程并发执行时,保证同一时刻,只有一个线程可以执行某个代码块或方法:同时还 ...
- boost asio acceptor 构造
boost::asio::io_service io_svc; boost::asio::ip::address_v4 lis_ip; // 默认监听本机所有IP boost::asio::ip::t ...
- 面对对象(JS)
面对对象的三大特征:封闭.继承.多态 七大基本原则: 1.单一职责 2.开闭原则 3.里氏替换 4.依赖倒置 5.接口隔离 6.迪米特法则 7.01组合/聚合 ...
- 网站数据采集|埋点设计|nginx日志文件
数据获取的方式主要可以分为两种: 1.网站日志文件(log files) 页面埋点js自定义的采集. 优缺点: web服务器自带的日志记录功能:优点方便,缺点信息收集不全 自定义的js埋点收集:优点想 ...
- iOS报错锦集
1.Your session has expired. Please log in. 提示“Your session has expired. Please log in.” 解决办法: Xcode ...
- Memory barrier,
A memory barrier, also known as a membar, memory fence or fence instruction, 是一种屏障指令,它使中央处理单元(CPU)或编 ...
- ncurses库的介绍与安装
Frm: http://blog.csdn.net/Mary_Jane/article/details/50769631 介绍 ncurses(new curses)是一套编程库,它提供了一系列的函数 ...
- 剑指offer——36二叉树和为某一值的路径
题目描述 输入一颗二叉树的根节点和一个整数,打印出二叉树中结点值的和为输入整数的所有路径.路径定义为从树的根结点开始往下一直到叶结点所经过的结点形成一条路径.(注意: 在返回值的list中,数组长度大 ...