Hi3559AV100外接UVC/MJPEG相机实时采图设计(二):V4L2接口的实现(以YUV422为例)
下面将给出Hi3559AV100外接UVC/MJPEG相机实时采图设计的整体流程,主要实现是通过V4L2接口将UVC/MJPEG相机采集的数据送入至MPP平台,经过VDEC、VPSS、VO最后通过HDMI的输出,给出(二)V4L2接口的实现。
可以先参照前面随笔介绍(一)Linux USB摄像头驱动加载与分析:https://www.cnblogs.com/iFrank/p/14399421.html
板载平台:BOXER-8410AI
芯片型号:Hi3559AV100
相机型号:Logitch c270
开发环境:VM15.5+ubuntu16.04+Hilinux
1、V4L2接口说明
V4L2是Video for linux2的简称,为linux中关于视频设备的内核驱动。在Linux中,视频设备是设备文件,可以像访问普通文件一样对其进行读写,摄像头在/dev/video*下,如果只有一个视频设备,通常为/dev/video0。V4L2是内核提供给应用程序访问音、视频驱动的统一接口。V4L2 的相关定义包含在头文件<linux/videodev2.h> 中。
IOCTL的实现V4L2的控制
1:分配内存
2 VIDIOC_QUERYBUF:把VIDIOC_REQBUFS中分配的数据缓存转换成物理地址
3 VIDIOC_QUERYCAP:查询驱动功能
4 VIDIOC_ENUM_FMT:获取当前驱动支持的视频格式
5 VIDIOC_S_FMT:设置当前驱动的频捕获格式
6 VIDIOC_G_FMT:读取当前驱动的频捕获格式
7 VIDIOC_TRY_FMT:验证当前驱动的显示格式
8 VIDIOC_CROPCAP:查询驱动的修剪能力
9 VIDIOC_S_CROP:设置视频信号的边框
10 VIDIOC_G_CROP:读取视频信号的边框
11 VIDIOC_QBUF:把数据放回缓存队列
12 VIDIOC_DQBUF:把数据从缓存中读取出来
13 VIDIOC_STREAMON:开始视频显示函数
14 VIDIOC_STREAMOFF:结束视频显示函数
15 VIDIOC_QUERYSTD:检查当前视频设备支持的标准,例如PAL或NTSC。
这些IO调用,有些是必须的,有些是可选择的,其命令标志符在在头文件<linux/videodev2.h> 定义,具体如下:
1 #define VIDIOC_QUERYCAP _IOR('V', 0, struct v4l2_capability)
2 #define VIDIOC_RESERVED _IO('V', 1)
3 #define VIDIOC_ENUM_FMT _IOWR('V', 2, struct v4l2_fmtdesc)
4 #define VIDIOC_G_FMT _IOWR('V', 4, struct v4l2_format)
5 #define VIDIOC_S_FMT _IOWR('V', 5, struct v4l2_format)
6 #define VIDIOC_REQBUFS _IOWR('V', 8, struct v4l2_requestbuffers)
Logitch c270支持的像素格式有两种:
1 YUYV 4:2:2 2 Motion-JPEG
2、V4L2的实现流程
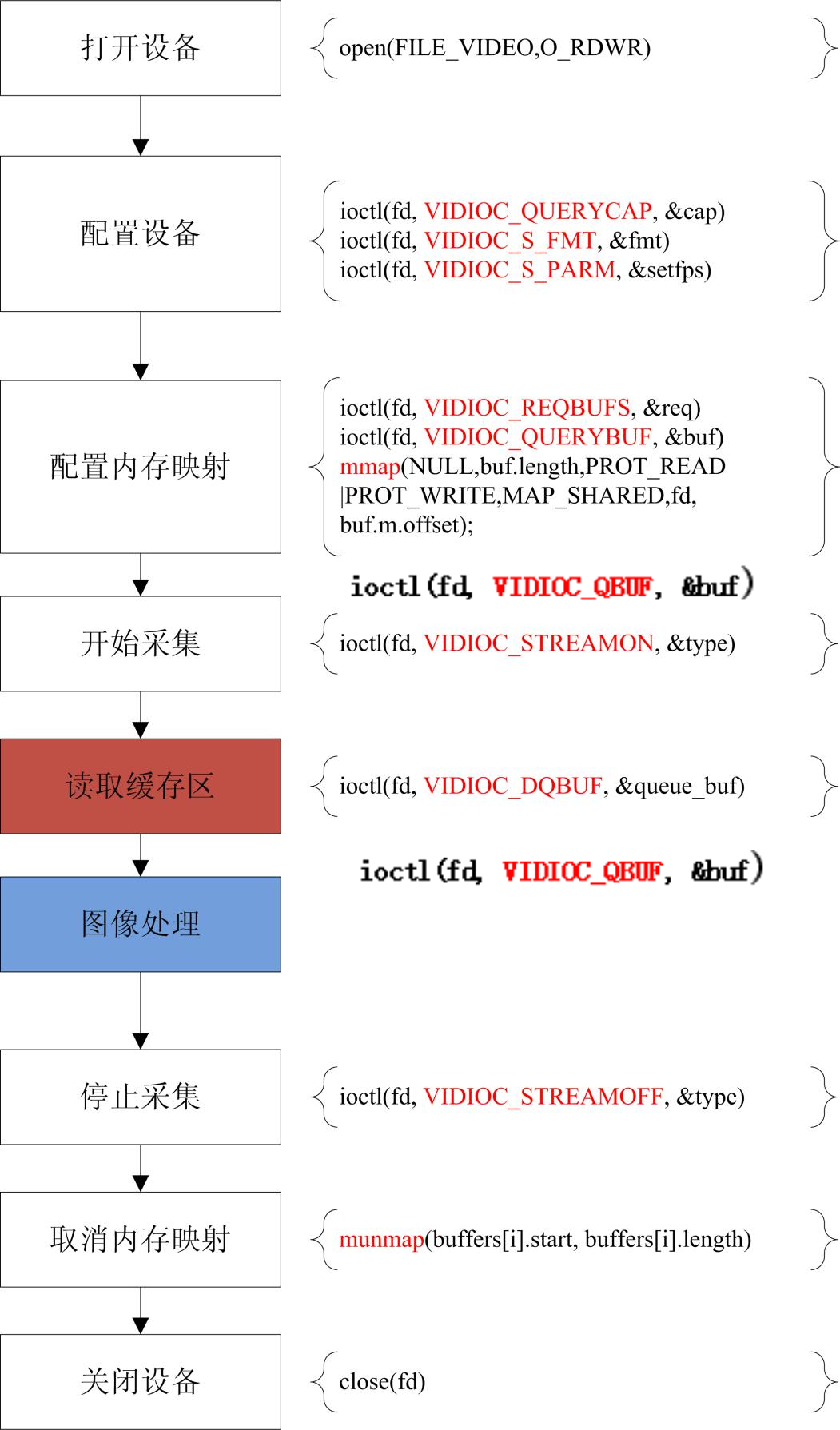
动态视频采集流程:
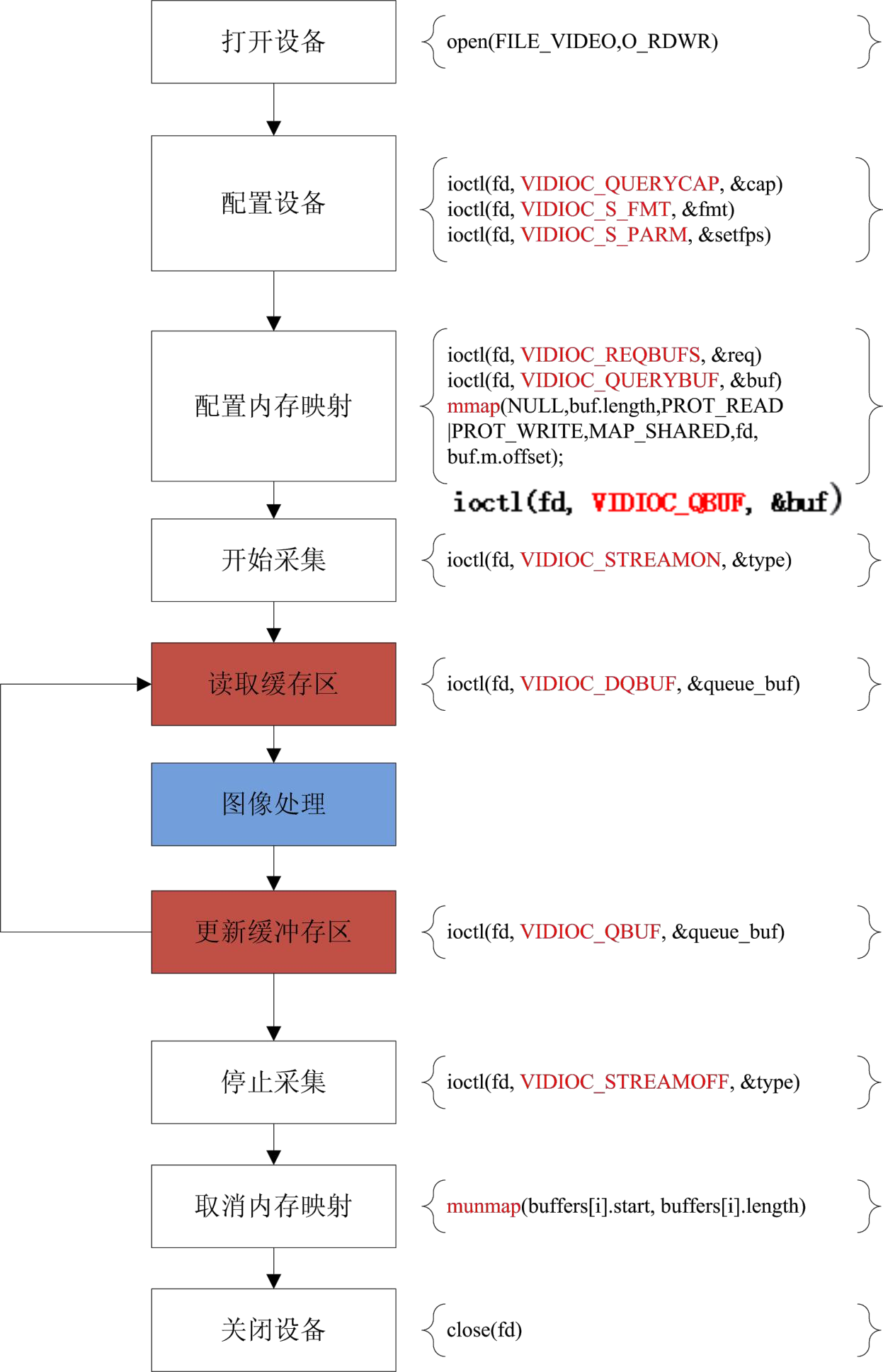
部分代码实现:
1 /*打开视频*/
2 if ((fd = open(FILE_VIDEO, O_RDWR)) == -1)
3 {
4 printf("Error opening V4L interface\n");
5 return (FALSE);
6 }
7
8 /*读video_capability中信息。
9 通过调用IOCTL函数和接口命令VIDIOC_QUERYCAP查询
10 摄像头的信息*/
11 if (ioctl(fd, VIDIOC_QUERYCAP, &cap) == -1)
12 {
13 printf("Error opening device %s: unable to query device.\n",FILE_VIDEO);
14 return (FALSE);
15 }
16 else
17 {
18 printf("driver:\t\t%s\n",cap.driver);
19 printf("card:\t\t%s\n",cap.card);
20 printf("bus_info:\t%s\n",cap.bus_info);
21 printf("version:\t%d\n",cap.version);
22 printf("capabilities:\t%x\n",cap.capabilities);
23
24 /*其中capabilities: 4000001通过与各种宏位与,
25 可以获得物理设备的功能属性*/
26 if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) == V4L2_CAP_VIDEO_CAPTURE)
27 {
28 printf("Device %s: supports capture.\n",FILE_VIDEO);
29 }
30
31 if ((cap.capabilities & V4L2_CAP_STREAMING) == V4L2_CAP_STREAMING)
32 {
33 printf("Device %s: supports streaming.\n",FILE_VIDEO);
34 }
35 } //VIDIOC_QUERYCAP对应唯一结构体
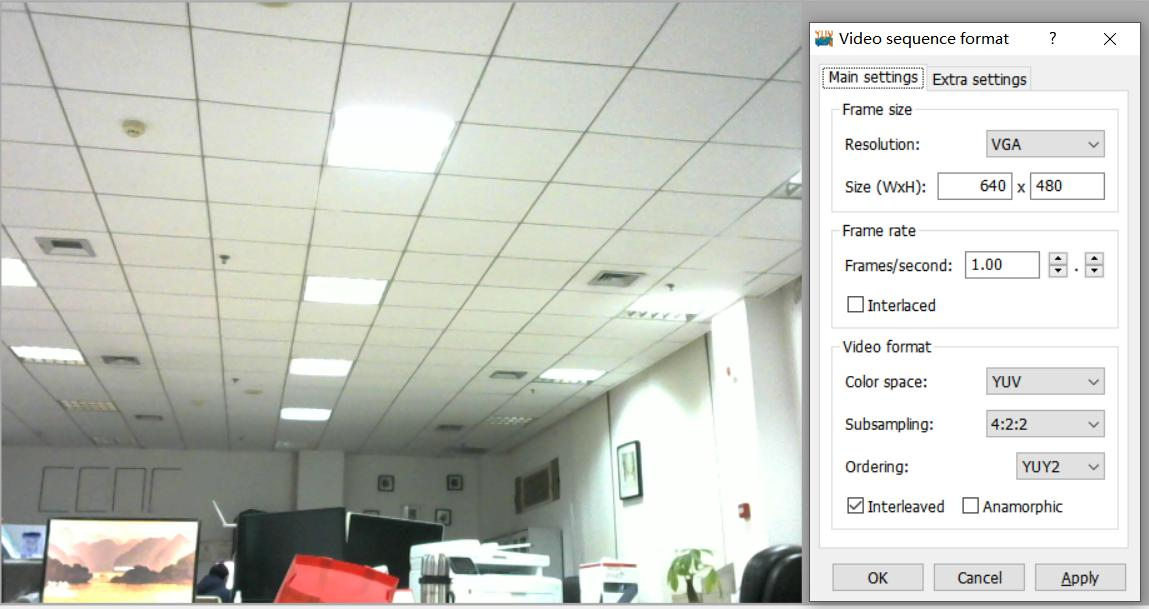
3、V4L2测试(640×480像素一帧图片输出)
我板载上装的是Logitch c270摄像头,从摄像头支持的图像像素输出的信息可以看出,在Hi3559板载上可以支持2种像素格式,这里选用的是V4L2_PIX_FMT_YUV422 格式。从生成image的大小可以判断出是正确的(YUV422数据大小 = 长 * 宽 * 1.5 = 640 * 480 * 2 = 614400 bytes = 600k)可以将image文件拷出来,使用pYUV 软件查看YUV图片。这里需要注意,使用pYUV 查看YUV图片的时候,需要正确设置图片格式,按我上面代码采集的数据格式,最后一帧图片输出结果如下:
之后随笔将推出结合MPP平台实现视频流的输出。
问题:

在虚拟机上,脚本运行正常,但是会卡在视频采集处,个人认为是虚拟机的缓存问题,而板载缓存比较充足,所以能够很好实现。
Hi3559AV100外接UVC/MJPEG相机实时采图设计(二):V4L2接口的实现(以YUV422为例)的更多相关文章
- Hi3559AV100外接UVC/MJPEG相机实时采图设计(三):V4L2接口通过MPP平台输出
可以首先参考前面两篇文章: Hi3559AV100外接UVC/MJPEG相机实时采图设计(一):Linux USB摄像头驱动分析: https://www.cnblogs.com/iFrank/p/1 ...
- Hi3559AV100外接UVC/MJPEG相机实时采图设计(一):Linux USB摄像头驱动分析
下面将给出Hi3559AV100外接UVC/MJPEG相机实时采图设计的整体流程,主要实现是通过V4L2接口将UVC/MJPEG相机采集的数据送入至MPP平台,经过VDEC.VPSS.VO最后通过HD ...
- Hi3559AV100外接UVC/MJPEG相机实时采图设计(四):VDEC_Send_Stream线程分析
下面随笔将对Hi3559AV100外接UVC/MJPEG相机实现实时采图设计的关键点-VDEC_Send_Stream线程进行分析,一两个星期前我写了有三篇系列随笔,已经实现了项目功能,大家可以参考下 ...
- Dalsa 8K彩色相机Camera link C#采图
一个采图工具,所以界面做的很简单. private SapAcquisition m_Acquisition; private SapBuffer m_Buffers; private SapAcqT ...
- 相机拍的图,电脑上画的图,word里的文字,电脑屏幕,手机屏幕,相机屏幕显示大小一切的一切都搞明白了!
相机拍的图,电脑上画的图,word里的文字,电脑屏幕,手机屏幕,相机屏幕显示大小一切的一切都搞明白了! 先说图片X×dpi=点数dotX是图片实际尺寸,简单点,我们只算图片的高吧,比如说拍了张图片14 ...
- FusionCharts制作实时刷新图
转自:http://yklovejava-163-com.iteye.com/blog/1889949 下面介绍的是用FusionCharts制作实时刷新图的过程(FusionCharts确实太好用了 ...
- Android相机实时自动对焦的完美实现
https://zhidao.baidu.com/question/873328177698804372.html Android相机实时自动对焦的完美实现 http://blog.csdn.net/ ...
- 关于nagios系统下使用shell脚本自定义监控插件的编写以及没有实时监控图的问题
关于nagios系统下shell自定义监控插件的编写.脚本规范以及没有实时监控图的问题的解决办法 在自已编写监控插件之前我们首先需要对nagios监控原理有一定的了解 Nagios的功能是监控服务和主 ...
- Hi3559AV100板载开发系列-pthread_create()下V4L2接口MJPEG像素格式的VIDIOC_DQBUF error问题解决-采用阻塞方式下select监听
最近一直加班加点进行基于Hi3559AV100平台的BOXER-8410AI板载开发,在开发的过程中,遇到了相当多的问题,其一是板载的开发资料没有且功能不完整,厂家不提供太多售后技术支持,厂家对部分 ...
随机推荐
- Codeforces Round #656 (Div. 3) C. Make It Good
题目链接:https://codeforces.com/contest/1385/problem/C 题意 去除一个数组的最短前缀使得余下的数组每次从首或尾部取元素可以排为非减序. 题解一 当两个大数 ...
- POJ - 3376 Finding Palindromes(拓展kmp+trie)
传送门:POJ - 3376 题意:给你n个字符串,两两结合,问有多少个是回文的: 题解:这个题真的恶心,我直接经历了5种错误类型 : ) ... 因为卡内存,所以又把字典树改成了指针版本的. 字符串 ...
- Codeforces Round #582 (Div. 3) E. Two Small Strings (构造,思维,全排列)
题意:给你两个长度为\(2\)的字符串\(s\)和\(t\),你需要构造一个长度为\(3n\)的字符串,满足:含有\(n\)个\(a\),\(n\)个\(b\),\(n\)个\(c\),并且\(s\) ...
- Codeforces Round #672 (Div. 2) C1. Pokémon Army (easy version) (DP)
题意:给你一组数\(a\),构造一个它的子序列\(b\),然后再求\(b_1-b2+b3-b4...\),问构造后的结果最大是多少. 题解:线性DP.我们用\(dp1[i]\)来表示在\(i\)位置, ...
- CodeForces - 1250J The Parade 二分
题目 题意: 一共n种身高,每一个士兵有一个身高.你需要把他们安排成k行(士兵不需要全部安排),每一行士兵身高差距小于等于1.你要找出来最多能安排多少士兵 题解: 这道题很容易就能看出来就是一道二分, ...
- 二进制方式安装docker(非root用户启动docker)
二进制方式安装docker(非root用户启动docker) 一.下载安装包: 地址:https://download.docker.com/linux/static/stable/x86_64/ 这 ...
- 图解算法——链表中倒数第k个节点
题目来源: 剑指 Offer 22. 链表中倒数第k个节点 leetCode 题目描述: 输入一个链表,输出该链表中倒数第k个节点.为了符合大多数人的习惯,本题从1开始计数,即链表的尾节点是倒数第1个 ...
- linux通识
linux是服务器应用领域的开源且免费的多用户多任务操作系统的内核. 以下是对上述论断的解释: 操作系统 简言之,操作系统乃是所有计算设备的大管家,小到智能手表,大到航天航空设备,所有需要操控硬件的地 ...
- TypeScript Errors All In One
TypeScript Errors All In One 1. Property 'name' has no initializer and is not definitely assigned in ...
- CustomEvent & Event
CustomEvent & Event js 自定义事件 const event = new CustomEvent(typeArg, customEventInit); // add an ...