2019 SDN上级第五次作业
1.浏览RYU官网学习RYU控制器的安装和RYU开发入门教程,提交你对于教程代码的理解,包括但不限于:
描述官方教程实现了一个什么样的交换机功能?
答:官方教程实现了一个将接收到的数据包发送到所有端口的交换机功能
控制器设定交换机支持什么版本的OpenFlow?
答:控制器设定交换机支持OpenFlow 1.0
控制器设定了交换机如何处理数据包?
答:'''@set_ev_cls(ofp_event.EventOFPPacketIn, MAIN_DISPATCHER)'''
答:当Ryu收到OpenFlow交换机送来的packet_in消息时调用新增方法packet_in_handler,set_ev_cls的第一个参数也声明了
2.根据官方教程和提供的示例代码(SimpleSwitch.py),将具有自学习功能的交换机代码(SelfLearning.py)补充完整
代码链接
如下是补充完整代码:
from ryu.base import app_manager
from ryu.controller import ofp_event
from ryu.controller.handler import MAIN_DISPATCHER
from ryu.controller.handler import set_ev_cls
from ryu.ofproto import ofproto_v1_0
from ryu.lib.mac import haddr_to_bin
from ryu.lib.packet import packet
from ryu.lib.packet import ethernet
from ryu.lib.packet import ether_types
from ryu.lib.packet import ipv4
class SimpleSwitch(app_manager.RyuApp):
# TODO define OpenFlow 1.0 version for the switch
# add your code here
OFP_VERSIONS = [ofproto_v1_0.OFP_VERSION]
def __init__(self, *args, **kwargs):
super(SimpleSwitch, self).__init__(*args, **kwargs)
self.mac_to_port = {}
def add_flow(self, datapath, in_port, dst, src, actions):
ofproto = datapath.ofproto
match = datapath.ofproto_parser.OFPMatch(
in_port=in_port,
dl_dst=haddr_to_bin(dst), dl_src=haddr_to_bin(src))
mod = datapath.ofproto_parser.OFPFlowMod(
datapath=datapath, match=match, cookie=0,
command=ofproto.OFPFC_ADD, idle_timeout=0, hard_timeout=0,
priority=ofproto.OFP_DEFAULT_PRIORITY,
flags=ofproto.OFPFF_SEND_FLOW_REM, actions=actions)
# TODO send modified message out
# add your code here
datapath.send_msg(mod)
@set_ev_cls(ofp_event.EventOFPPacketIn, MAIN_DISPATCHER)
def _packet_in_handler(self, ev):
msg = ev.msg
datapath = msg.datapath
ofproto = datapath.ofproto
pkt = packet.Packet(msg.data)
eth = pkt.get_protocol(ethernet.ethernet)
if eth.ethertype == ether_types.ETH_TYPE_LLDP:
# ignore lldp packet
return
if eth.ethertype == ether_types.ETH_TYPE_IPV6:
# ignore ipv6 packet
return
dst = eth.dst
src = eth.src
dpid = datapath.id
self.mac_to_port.setdefault(dpid, {})
self.logger.info("packet in DPID:%s MAC_SRC:%s MAC_DST:%s IN_PORT:%s", dpid, src, dst, msg.in_port)
# learn a mac address to avoid FLOOD next time.
self.mac_to_port[dpid][src] = msg.in_port
if dst in self.mac_to_port[dpid]:
out_port = self.mac_to_port[dpid][dst]
else:
out_port = ofproto.OFPP_FLOOD
# TODO define the action for output
# add your code here
actions = [datapath.ofproto_parser.OFPActionOutput(out_port)]
# install a flow to avoid packet_in next time
if out_port != ofproto.OFPP_FLOOD:
self.logger.info("add flow s:DPID:%s Match:[ MAC_SRC:%s MAC_DST:%s IN_PORT:%s ], Action:[OUT_PUT:%s] ", dpid, src, dst, msg.in_port, out_port)
self.add_flow(datapath, msg.in_port, dst, src, actions)
data = None
if msg.buffer_id == ofproto.OFP_NO_BUFFER:
data = msg.data
# TODO define the OpenFlow Packet Out
# add your code here
out = datapath.ofproto_parser.OFPPacketOut(datapath=datapath, buffer_id=msg.buffer_id, in_port=msg.in_port, actions=actions, data=data)
datapath.send_msg(out)
print ("PACKET_OUT...")
3.在mininet创建一个最简拓扑,并连接RYU控制器
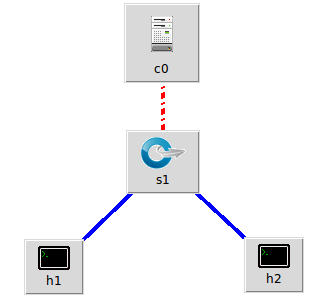
拓扑代码如下:
#!/usr/bin/python
#Creating Inernet Topo
from mininet.topo import Topo
class MyTopo(Topo):
def __init__(self):
# initilaize topology
Topo.__init__(self)
# add hosts and switches
h1 = self.addHost('h1')
h2 = self.addHost('h2')
s1 = self.addSwitch('s1')
# add links
self.addLink(h1, s1, 1, 1)
self.addLink(h2, s1, 1, 2)
topos = {'mytopo': (lambda: MyTopo())}

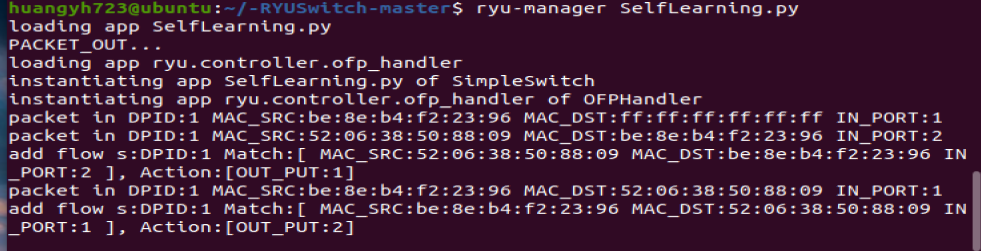
使用命令连接控制器
ryu-manager SelfLearning.py
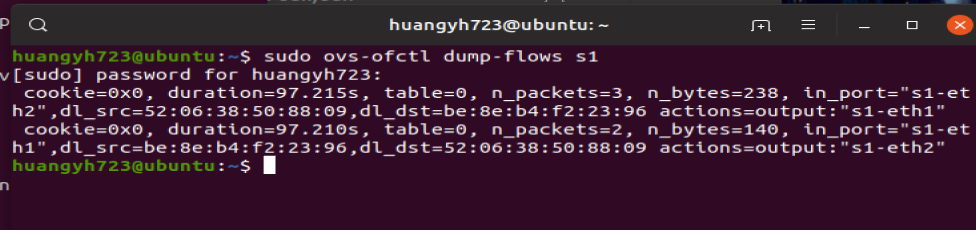
4.验证自学习交换机的功能,提交分析过程和验证结果
创建一个拓扑后,如果没有ryu控制器连接,pingall命令的时候是不通的

通过ovs-ofctl dump-flow命令查看s1所有流表时显示无流表存在

接入ryu控制器之后使用pingall命令的时候可以ping通,且s1存在多个流表

5.写下你的实验体会
感觉这次实验除了Ryu难装其他还是很轻松的,这个实验很有意思,代码要看好久才能懂得一点···希望自己加油吧!2019 SDN上级第五次作业的更多相关文章
- 2019 SDN上机第五次作业
1.浏览RYU官网学习RYU控制器的安装和RYU开发入门教程,提交你对于教程代码的理解,包括但不限于: 描述官方教程实现了一个什么样的交换机功能? 实现将接收到的数据包发送到所有端口 控制器设定交换机 ...
- SDN上机第五次作业
2019 SDN上机第五次作业 1.浏览RYU官网学习RYU控制器的安装和RYU开发入门教程,提交你对于教程代码的理解,包括但不限于: 1.1描述官方教程实现了一个什么样的交换机功能? 答:官方教程实 ...
- 2019 SDN上机第7次作业
2019 SDN上机第7 次作业 basic补充`/* -- P4_16 -- */ include <core.p4> include <v1model.p4> const ...
- 2019 SDN上机第6次作业
2019 SDN上机第6次作业 1.实验拓扑 (1)实验拓扑 (2)使用Python脚本完成拓扑搭建 from mininet.topo import Topo from mininet.net im ...
- 2019 SDN上机第5次作业
2019 SDN上机第5次作业 1.浏览RYU官网学习RYU控制器的安装和RYU开发入门教程,提交你对于教程代码的理解,包括但不限于: 描述官方教程实现了一个什么样的交换机功能? 答:官方教程实现了一 ...
- 2019 SDN上机第四次作业
2019 SDN上机第4次作业 1. 解压安装OpenDayLight控制器(本次实验统一使用Beryllium版本) 修改环境变量 2. 启动并安装插件 3. 用Python脚本搭建如下拓扑,连接O ...
- 2019 SDN上机第三次作业
2019 SDN上机第三次作业 实验一 利用Mininet仿真平台构建如下图所示的网络拓扑,配置主机h1和h2的IP地址(h1:10.0.0.1,h2:10.0.0.2),测试两台主机之间的网络连通性 ...
- 2019 SDN第6次上机作业
1.作业要求: 作业链接 参考资料: Ryu控制器的API文档:ryu.app.ofctl_rest Ryu的拓扑展示 助教博客:基于RYU restful api实现的VLAN网络虚拟化 2.具体操 ...
- 2019 SDN第四次上机作业
作业博客链接:http://edu.cnblogs.com/campus/fzu/fzusdn2019/homework/10017 1. 解压安装OpenDayLight控制器(本次实验统一使用Be ...
随机推荐
- 有用的vscode快捷键大全+自定义快捷键
VS Code是前端的一个比较好用的代码编辑器,但是我们不能老是局限于鼠标操作呀,有时候很不方便,所以呢,快捷键大全来啦,有的可能会和你们电脑自带的快捷键冲突呢,这时候,你自己设置一下就好了呀 一.v ...
- Linux磁盘管理——虚拟文件系统
前言 Linux支持众多文件系统,包括: 传统文件系统:ext2 / minix / MS-DOS / FAT (用 vfat 模块) / iso9660 (光盘)等等:日志式文件系统: ext3 / ...
- roles
nginx 官方下载 [root@ansible roles]# tree yngx yngx ├── defaults ├── files │ ├── blog.conf │ ├── edu ...
- 基于Java+Selenium的WebUI自动化测试框架(六)---浏览器初始化
本篇我们来讨论,如何写一个浏览器初始化的类.在写之前,先思考一下,我们需要一个什么样的初始化? 先来看看使用原生的Java + selenium是怎么做的.(以firefox为例) System.se ...
- 【胡搞的不能AC的题解,暴力搜索一发博弈问题】1995 三子棋 - 51Nod
1995 三子棋 题目来源: syu校赛 基准时间限制:1 秒 空间限制:131072 KB 分值: 0 难度:基础题 原题链接: https://www.51nod.com/onlineJudge/ ...
- 4.Python 进制和位运算
.button, #logout { color: #333; background-color: #fff; border-color: #ccc; } span#login_widget > ...
- 使用jQuery快速高效制作网页交互特效---jQuery选择器
一.什么是jQuery选择器 Query选择器继承了CSS与Path语言的部分语法,允许通过标签名.属性名或内容对DOM元素进行快速.准确的选择, 而不必担心浏览器的兼容性,通过jQuery选择器对页 ...
- SQLServer函数 left()、charindex()、stuff()
SQLServer函数 left().charindex().stuff()的使用 1.left()LEFT (<character_expression>, <integer_ex ...
- learning scala Function Composition andThen
Ordering using andThen: f(x) andThen g(x) = g(f(x)) Ordering using compose: f(x) compose g(x) = f(g( ...
- promise 及 setTimeout 执行顺序
setTimeout(function() { console.log(1); }, 0); new Promise(function(res, rej) { res(2); console.log( ...