专家PID控制
1、专家PID控制原理
PID专家控制的实质是,基于受控对象和控制规律的各种知识,无需知道被控对象的精确模型,利用专家经验来设计PID参数。专家PID控制是一种直接型专家控制器。
典型的二阶系统单位阶跃响应误差曲线如图2-5所示。对于典型的二阶系统阶跃响应过程作如下分析。
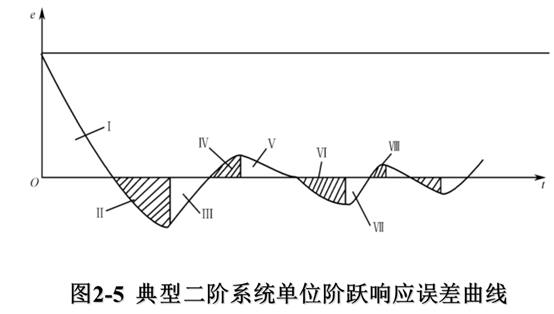
图2-5中,Ⅰ、Ⅲ、Ⅴ、Ⅶ、…区域,误差朝绝对值减小的方向变化。此时,可采取保持等待措施,相当于实施开环控制;Ⅱ、Ⅳ、Ⅵ、Ⅷ、…区域,误差绝对值朝增大的方向变化。此时,可根据误差的大小分别实施较强或一般的控制作用,以抑制动态误差。
令e(k)表示离散化的当前采样时刻的误差值,e(k-1)和e(k-2)分别表示前一个和前两个采样时刻的误差值,则有:

根据误差及其变化,可设计专家PID控制器,该控制器可分为以下五种情况进行设计:
(1)当|e(k)|>M1 时,说明误差的绝对值已经很大。不论误差变化趋势如何,都应考虑控制器的输出应按最大(或最小)输出,以达到迅速调整误差,使误差绝对值以最大速度减小。此时,它相当于实施开环控制。
(2)当e(k)Δe(k)>0或 Δe(k)=0时,说明误差在朝误差绝对值增大方向变化,或误差为某一常值,未发生变化。
此时,如果|e(k)|≥M2,说明误差也较大,可考虑由控制器实施较强的控制作用,以达到扭转误差绝对值朝减小方向变化,并迅速减小误差的绝对值,控制器输出为:

如果 |e(k)|<M2,说明尽管误差朝绝对值增大方向变化,但误差绝对值本身并不很大,可考虑控制器实施一般的控制作用,只要扭转误差的变化趋势,使其朝误差绝对值减小方向变化,控制器输出为

(3)当e(k)Δe(k)<0、Δe(k)Δe(k-1)>0或者e(k)=0 时,说明误差的绝对值朝减小的方向变化,或者已经达到平衡状态。此时,可考虑采取保持控制器输出不变。
(4)当e(k)Δe(k)<0、Δe(k)Δe(k-1)<0时,说明误差处于极值状态。如果此时误差的绝对值较大,即|e(k)|≥M2 ,可考虑实施较强的控制作用。

如果此时误差的绝对值较小,即|e(k)|<M2,可考虑实施较弱的控制作用

(5)当e(k)<ε时,说明误差的绝对值很小,此时加入积分,减少稳态误差。
以上各式中:
em(k)为误差e的第k个极值;
u(k)为第k次控制器的输出;
k1为增益放大系数,k1>1;
k2为抑制系数,0<k2<1;
M1,M2为设定的误差界限,M1>M2>0

专家PID控制的更多相关文章
- 专家PID控制仿真学习
目录 专家控制 专家系统 专家控制 学习笔记,用于记录学习 资料:<智能控制>(第四版)--刘金琨 专家系统 一.专家系统的定义 专家系统是一类包含知识和推理的智能计算机程序,其内部包含某 ...
- PID控制器开发笔记之十一:专家PID控制器的实现
前面我们讨论了经典的数字PID控制算法及其常见的改进与补偿算法,基本已经覆盖了无模型和简单模型PID控制经典算法的大部.再接下来的我们将讨论智能PID控制,智能PID控制不同于常规意义下的智能控制,是 ...
- 专家PID
前面我们讨论了经典的数字PID控制算法及其常见的改进与补偿算法,基本已经覆盖了无模型和简单模型PID控制经典算法的大部.再接下来的我们将讨论智能PID控制,智能PID控制不同于常规意义下的智能控制,是 ...
- 两轮自平衡小车双闭环PID控制设计
两轮自平衡小车的研究意义 ...
- PID控制算法的C语言实现十 专家PID与模糊PID的C语言实现
本节是PID控制算法的C语言实现系列的最后一节,前面8节中,已经分别从PID的实现到深入的过程进行了一个简要的讲解,从前面的讲解中不难看出,PID的控制思想非常简单,其主要问题点和难点在于比例.积分. ...
- PID控制及整定算法
一.PID控制算法 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID 控制的原理可以用人对炉温的手动控制来理解.阅读本 ...
- 【iCore3应用开发平台】发布 iCore3 应用开发平台PID控制代码
说明:1.本代码包包含FPGA和STM32F407两部分内容2.FPGA工程为出厂代码FPGA工程,版本为REV43.STM32F407为只含PID控制的ARM工程4.在使用风扇过程中,请勿将手伸入扇 ...
- 数字式PID控制的应用总结
PID控制是一个二阶线性闭环控制器,通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能.PID控制优点:a. 技术成熟,b. 易被人们熟悉和掌握,c. 不需要建立数学模型 ...
- PID控制学习笔记(二)
不管是基本的PID控制还是变形的PID控制算法,其核心都是对输入信号(设定值信号.测量信号或者偏差信号等)做基本的比例.积分.微分运算,最终提供给被控过程良好的调节信号. 在过程控制仪表,特别是在数字 ...
随机推荐
- linux 用户配置文件及其相关目录
用户配置文件及其相关目录: /etc/passwd 用户信息文件/etc/shadow 影子文件/etc/group 组信息文件/etc/gshadow 组密码文件邮箱目录模板目录 /etc/pass ...
- 实现自定义Session
1. 回话状态接口 /// <summary> /// 会话状态策略接口 /// </summary> public partial interface ISessionStr ...
- WEBserver 性能测试
本地实验(Centos7),WEBserver性能测试; 软件包地址 wget http://download.joedog.org/siege/siege-4.0.2.tar.gztar -xf s ...
- ASP.NET MVC使用AuthenticationAttribute验证登录
首先,添加一个类AuthenticationAttribute,该类继承AuthorizeAttribute,如下: using System.Web; using System.Web.Mvc; n ...
- iOS系统声音列表
iOS系统声音列表 效果 说明 1. 点击cell就能发出声音 2. 只需要给出声音编号,就可以,非常简单易用 源码 https://github.com/YouXianMing/iOS-Utilit ...
- django的admin后台注册model并显示
在admin后台注册model并显示其他字段: 修改app下的admin.py,注册model: from .models import vmadmin.site.register(vm) #注册名为 ...
- 通过nginx 访问 centos 7 服务器上的.Net Core
先安装依赖 # yum -y install pcre-devel openssl openssl-devel # yum -y install gcc gcc-c++ autoconf automa ...
- jQuery插件实例二:年华时代插件ReturnTop回到首页
这个插件功能在于当网页内容高度很高时,方便用户快速回到顶部.核心在于对屏幕高度的获取,定时器的使用,在引用代码后,只使用$.nhsd.returnTop();即可实现效果 效果图: 代码: ; fun ...
- web.config设置之system.webServer 详细介绍,为网站设置默认文档
如何:为 IIS 7.0 配置 <system.webServer> 节2008-06-14 22:26http://technet.microsoft.com/zh-cn/sysinte ...
- 【教程】【FLEX】#005 拖动
在Flex中,组件的拖动分为: 1. 加强型(即本身就可以拖动设置是否可以拖动的属 [dragEnabled ,dropEnabled ] 即可) 2. 非加强型(可以通过DragManager,Dr ...