Global Average Pooling Layers for Object Localization
For image classification tasks, a common choice for convolutional neural network (CNN) architecture is repeated blocks of convolution and max pooling layers, followed by two or more densely connected layers. The final dense layer has a softmax activation function and a node for each potential object category.
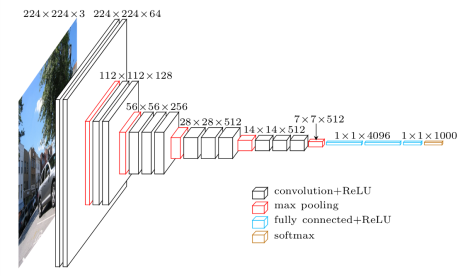
As an example, consider the VGG-16 model architecture, depicted in the figure below.
We can summarize the layers of the VGG-16 model by executing the following line of code in the terminal:
python -c 'from keras.applications.vgg16 import VGG16; VGG16().summary()'
Your output should appear as follows:
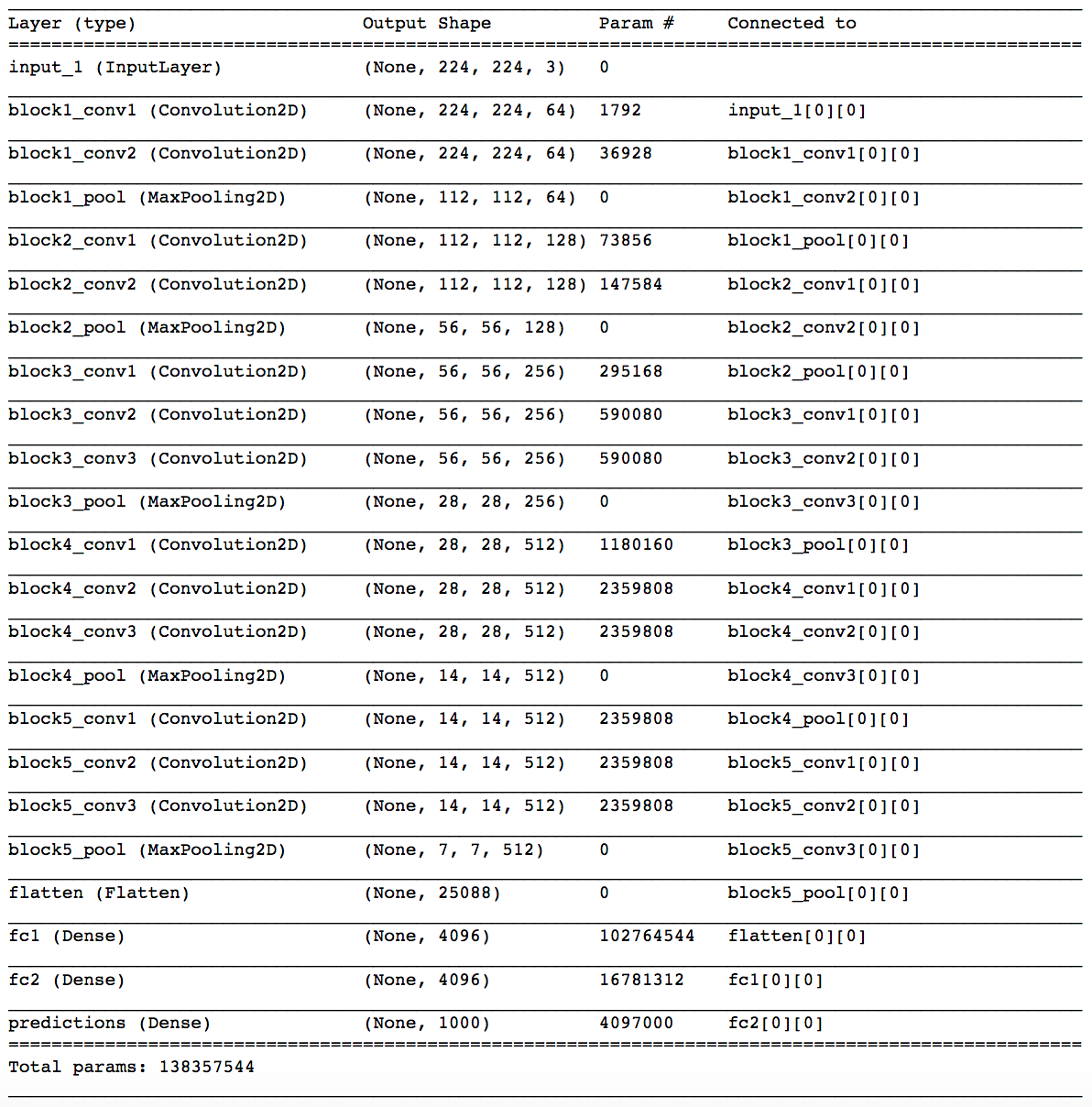
You will notice five blocks of (two to three) convolutional layers followed by a max pooling layer. The final max pooling layer is then flattened and followed by three densely connected layers. Notice that most of the parameters in the model belong to the fully connected layers!
As you can probably imagine, an architecture like this has the risk of overfitting to the training dataset. In practice, dropout layers are used to avoid overfitting.
Global Average Pooling
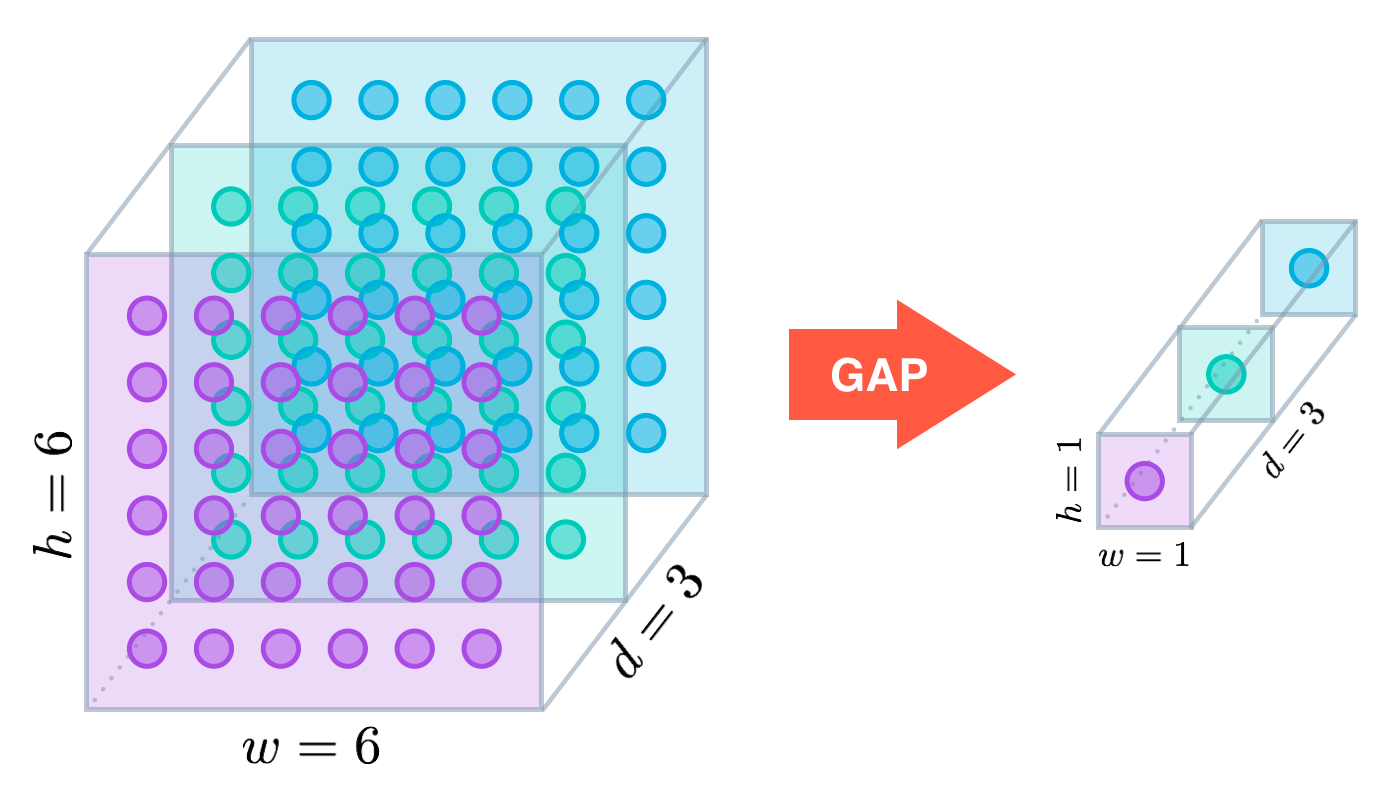
In the last few years, experts have turned to global average pooling (GAP) layers to minimize overfitting by reducing the total number of parameters in the model. Similar to max pooling layers, GAP layers are used to reduce the spatial dimensions of a three-dimensional tensor. However, GAP layers perform a more extreme type of dimensionality reduction, where a tensor with dimensions h×w×d" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">h×w×dh×w×d is reduced in size to have dimensions 1×1×d" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">1×1×d1×1×d. GAP layers reduce each h×w" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">h×wh×w feature map to a single number by simply taking the average of all hw" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">hwhw values.
The first paper to propose GAP layers designed an architecture where the final max pooling layer contained one activation map for each image category in the dataset. The max pooling layer was then fed to a GAP layer, which yielded a vector with a single entry for each possible object in the classification task. The authors then applied a softmax activation function to yield the predicted probability of each class. If you peek at the original paper, I especially recommend checking out Section 3.2, titled “Global Average Pooling”.
The ResNet-50 model takes a less extreme approach; instead of getting rid of dense layers altogether, the GAP layer is followed by one densely connected layer with a softmax activation function that yields the predicted object classes.
Object Localization
In mid-2016, researchers at MIT demonstrated that CNNs with GAP layers (a.k.a. GAP-CNNs) that have been trained for a classification task can also be used for object localization. That is, a GAP-CNN not only tells us what object is contained in the image - it also tells us where the object is in the image, and through no additional work on our part! The localization is expressed as a heat map (referred to as a class activation map), where the color-coding scheme identifies regions that are relatively important for the GAP-CNN to perform the object identification task. Please check out the YouTube video below for an awesome demo!
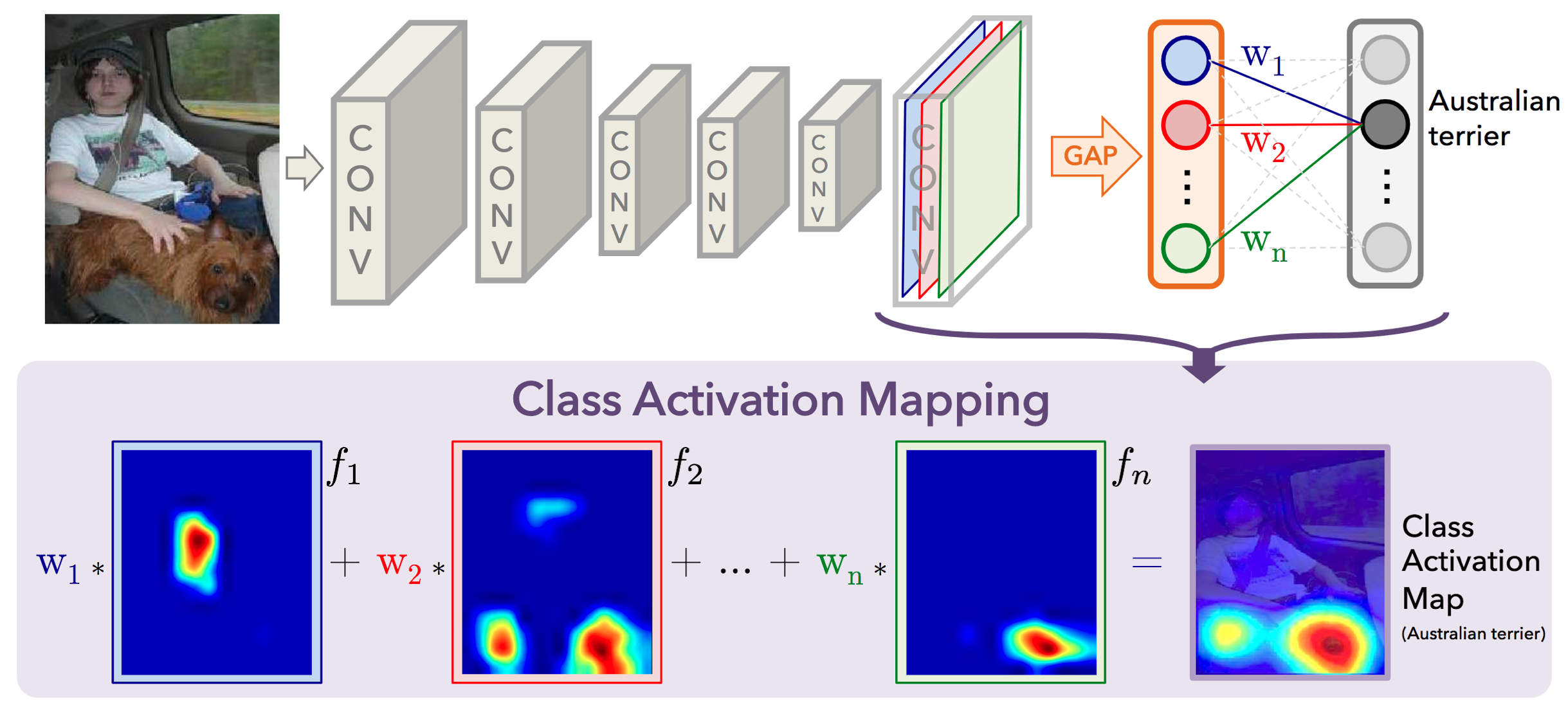
In the repository, I have explored the localization ability of the pre-trained ResNet-50 model, using the technique from this paper. The main idea is that each of the activation maps in the final layer preceding the GAP layer acts as a detector for a different pattern in the image, localized in space. To get the class activation map corresponding to an image, we need only to transform these detected patterns to detected objects.
This transformation is done by noticing each node in the GAP layer corresponds to a different activation map, and that the weights connecting the GAP layer to the final dense layer encode each activation map’s contribution to the predicted object class. To obtain the class activation map, we sum the contributions of each of the detected patterns in the activation maps, where detected patterns that are more important to the predicted object class are given more weight.
How the Code Operates
Let’s examine the ResNet-50 architecture by executing the following line of code in the terminal:
python -c 'from keras.applications.resnet50 import ResNet50; ResNet50().summary()'
The final few lines of output should appear as follows (Notice that unlike the VGG-16 model, the majority of the trainable parameters are not located in the fully connected layers at the top of the network!):
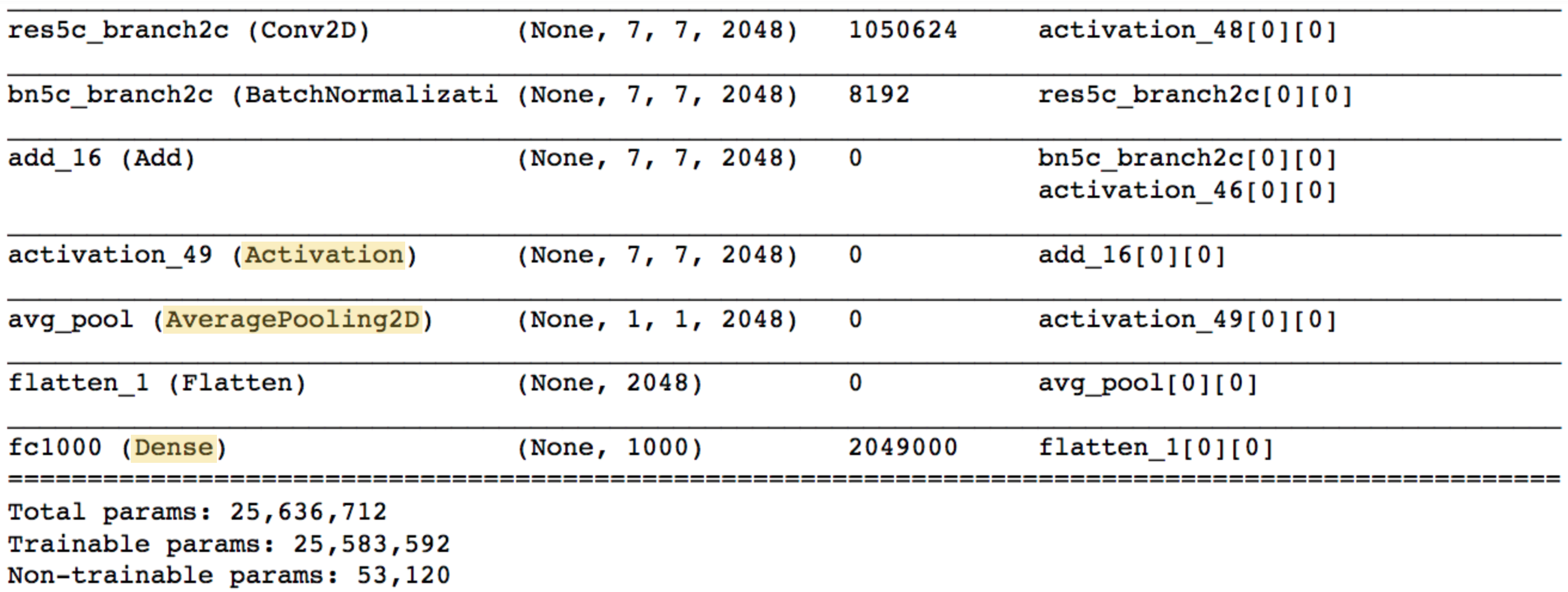
The Activation, AveragePooling2D, and Dense layers towards the end of the network are of the most interest to us. Note that the AveragePooling2D layer is in fact a GAP layer!
We’ll begin with the Activation layer. This layer contains 2048 activation maps, each with dimensions 7×7" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">7×77×7. Let fk" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">fkfk represent the k" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">kk-th activation map, where k∈{1,…,2048}" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">k∈{1,…,2048}k∈{1,…,2048}.
The following AveragePooling2D GAP layer reduces the size of the preceding layer to (1,1,2048)" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">(1,1,2048)(1,1,2048) by taking the average of each feature map. The next Flatten layer merely flattens the input, without resulting in any change to the information contained in the previous GAP layer.
The object category predicted by ResNet-50 corresponds to a single node in the final Dense layer; and, this single node is connected to every node in the preceding Flattenlayer. Let wk" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">wkwk represent the weight connecting the k" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">kk-th node in the Flatten layer to the output node corresponding to the predicted image category.
Then, in order to obtain the class activation map, we need only compute the sum
w1⋅f1+w2⋅f2+…+w2048⋅f2048" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">w1⋅f1+w2⋅f2+…+w2048⋅f2048w1⋅f1+w2⋅f2+…+w2048⋅f2048.
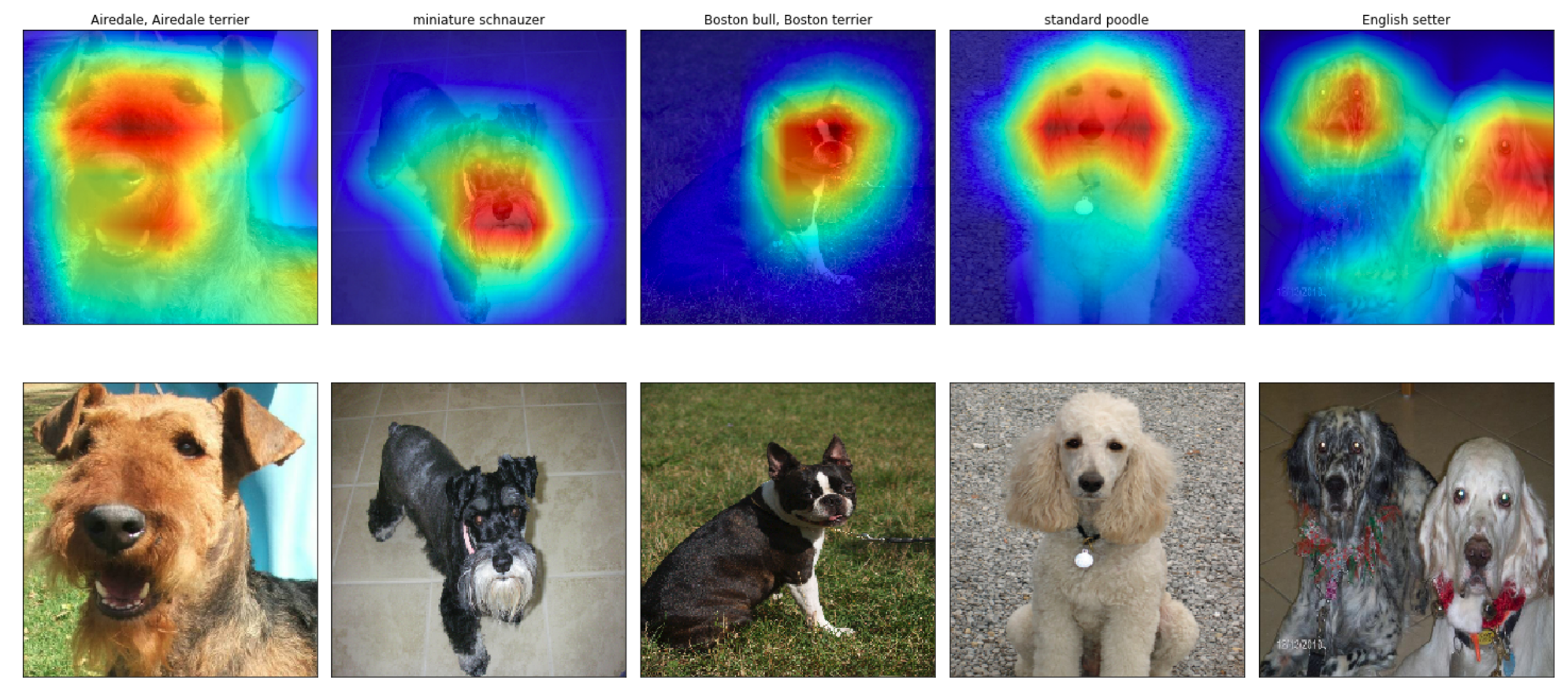
You can plot these class activation maps for any image of your choosing, to explore the localization ability of ResNet-50. Note that in order to permit comparison to the original image, bilinear upsampling is used to resize each activation map to 224×224" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">224×224224×224. (This results in a class activation map with size 224×224" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">224×224224×224.)
If you’d like to use this code to do your own object localization, you need only download the repository.
Global Average Pooling Layers for Object Localization的更多相关文章
- 深度学习基础系列(十)| Global Average Pooling是否可以替代全连接层?
Global Average Pooling(简称GAP,全局池化层)技术最早提出是在这篇论文(第3.2节)中,被认为是可以替代全连接层的一种新技术.在keras发布的经典模型中,可以看到不少模型甚至 ...
- 深度拾遗(06) - 1X1卷积/global average pooling
什么是1X1卷积 11的卷积就是对上一层的多个feature channels线性叠加,channel加权平均. 只不过这个组合系数恰好可以看成是一个11的卷积.这种表示的好处是,完全可以回到模型中其 ...
- 深度学习方法(十):卷积神经网络结构变化——Maxout Networks,Network In Network,Global Average Pooling
欢迎转载,转载请注明:本文出自Bin的专栏blog.csdn.net/xbinworld. 技术交流QQ群:433250724,欢迎对算法.技术感兴趣的同学加入. 最近接下来几篇博文会回到神经网络结构 ...
- Network in Network(2013),1x1卷积与Global Average Pooling
目录 写在前面 mlpconv layer实现 Global Average Pooling 网络结构 参考 博客:blog.shinelee.me | 博客园 | CSDN 写在前面 <Net ...
- [CVPR2015] Is object localization for free? – Weakly-supervised learning with convolutional neural networks论文笔记
p.p1 { margin: 0.0px 0.0px 0.0px 0.0px; font: 13.0px "Helvetica Neue"; color: #323333 } p. ...
- 论文笔记之:Active Object Localization with Deep Reinforcement Learning
Active Object Localization with Deep Reinforcement Learning ICCV 2015 最近Deep Reinforcement Learning算 ...
- [CVPR2017] Deep Self-Taught Learning for Weakly Supervised Object Localization 论文笔记
http://openaccess.thecvf.com/content_cvpr_2017/papers/Jie_Deep_Self-Taught_Learning_CVPR_2017_paper. ...
- 【37】池化层讲解(Pooling layers)
池化层(Pooling layers) 除了卷积层,卷积网络也经常使用池化层来缩减模型的大小,提高计算速度,同时提高所提取特征的鲁棒性,我们来看一下. 先举一个池化层的例子,然后我们再讨论池化层的 ...
- Spark UDAF实现举例 -- average pooling
目录 1.UDAF定义 2.向量平均(average pooling) 2.1 average的并行化 2.2 代码实现 2.3 使用 参考 1.UDAF定义 spark中的UDF(UserDefin ...
随机推荐
- 使用命令行创建一个vue项目的全部命令及结果
dell@DESKTOP-KD0EJ4H MINGW64 /f/05 项目 $ npm install --global vue-cli npm WARN deprecated coffee-scri ...
- python求100以内素数
python求100以内素数之和 from math import sqrt # 使用isPrime函数 def isPrime(n): if n <= 1: return False for ...
- mapreduce程序的按照key值从大到小降序排列
在近期的Hadoop的学习中,在学习mapreduce时遇到问题:让求所给数据的top10,们我们指导mapreduce中是有默认的排列机制的,是按照key的升序从大到小排列的 然而top10问题的求 ...
- vector.clear()不能用来清零
vector.clear()函数并不会把所有元素清零,笔者就曾经这样幻想过这个函数的作用,然而事实证明并不是. vector有两个参数,一个是size,表示当前vector容器内存储的元素个数,一个是 ...
- RabbitMq qos prefetch 消息堵塞问题
mq是实现代码扩展的有利手段,个人喜欢用概念来学习新知识,介绍堵塞问题的之前,先来段概念的学习. ConnectionFactory:创建connection的工厂类 Connection: 简单理解 ...
- HashMap、HashSet、LinkedHashSet、TreeSet的关系
类图及说明如下:
- (转) rabbitmq应用场景
原文:http://blog.csdn.net/wangpengblog/article/details/76405598
- linux中的tar命令的使用
参考网址: https://www.cnblogs.com/newcaoguo/p/5896975.html https://www.cnblogs.com/xccjmpc/p/6035397.htm ...
- tensorflow 滑动平均使用和恢复
https://www.cnblogs.com/hrlnw/p/8067214.html
- idea 错误: -source 1.6 中不支持 diamond 运算符的解决办法
在取一段github代码时,发现说是支持jdk 7 ,但是使用MAVEN编译不过去. 报错信息为错误: -source 1.6 中不支持 diamond 运算符 我使用的环境是1.7 + intel ...