Global Average Pooling Layers for Object Localization
For image classification tasks, a common choice for convolutional neural network (CNN) architecture is repeated blocks of convolution and max pooling layers, followed by two or more densely connected layers. The final dense layer has a softmax activation function and a node for each potential object category.
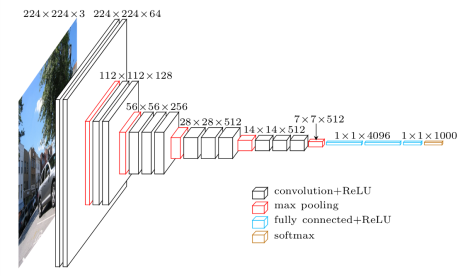
As an example, consider the VGG-16 model architecture, depicted in the figure below.
We can summarize the layers of the VGG-16 model by executing the following line of code in the terminal:
python -c 'from keras.applications.vgg16 import VGG16; VGG16().summary()'
Your output should appear as follows:
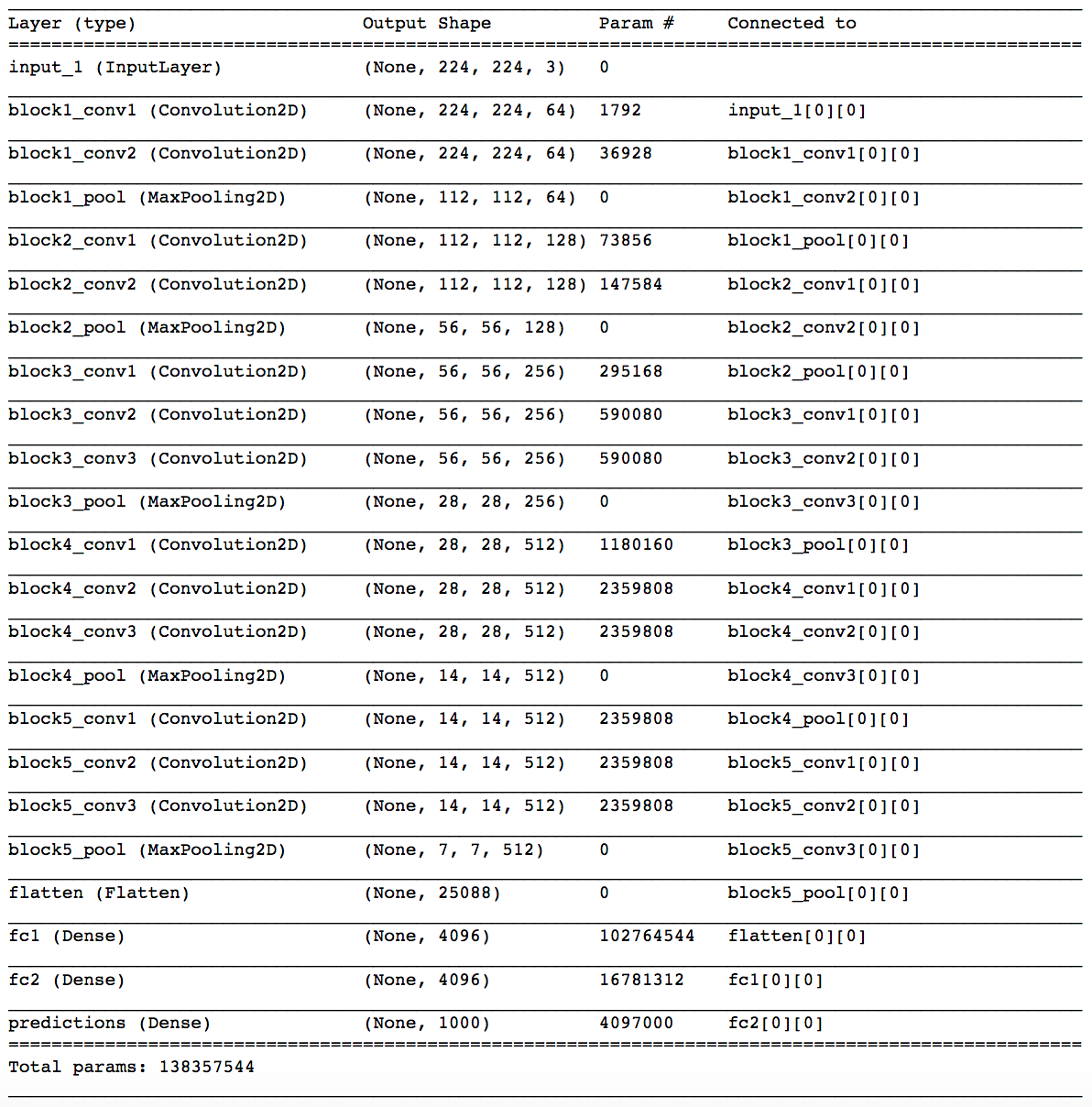
You will notice five blocks of (two to three) convolutional layers followed by a max pooling layer. The final max pooling layer is then flattened and followed by three densely connected layers. Notice that most of the parameters in the model belong to the fully connected layers!
As you can probably imagine, an architecture like this has the risk of overfitting to the training dataset. In practice, dropout layers are used to avoid overfitting.
Global Average Pooling
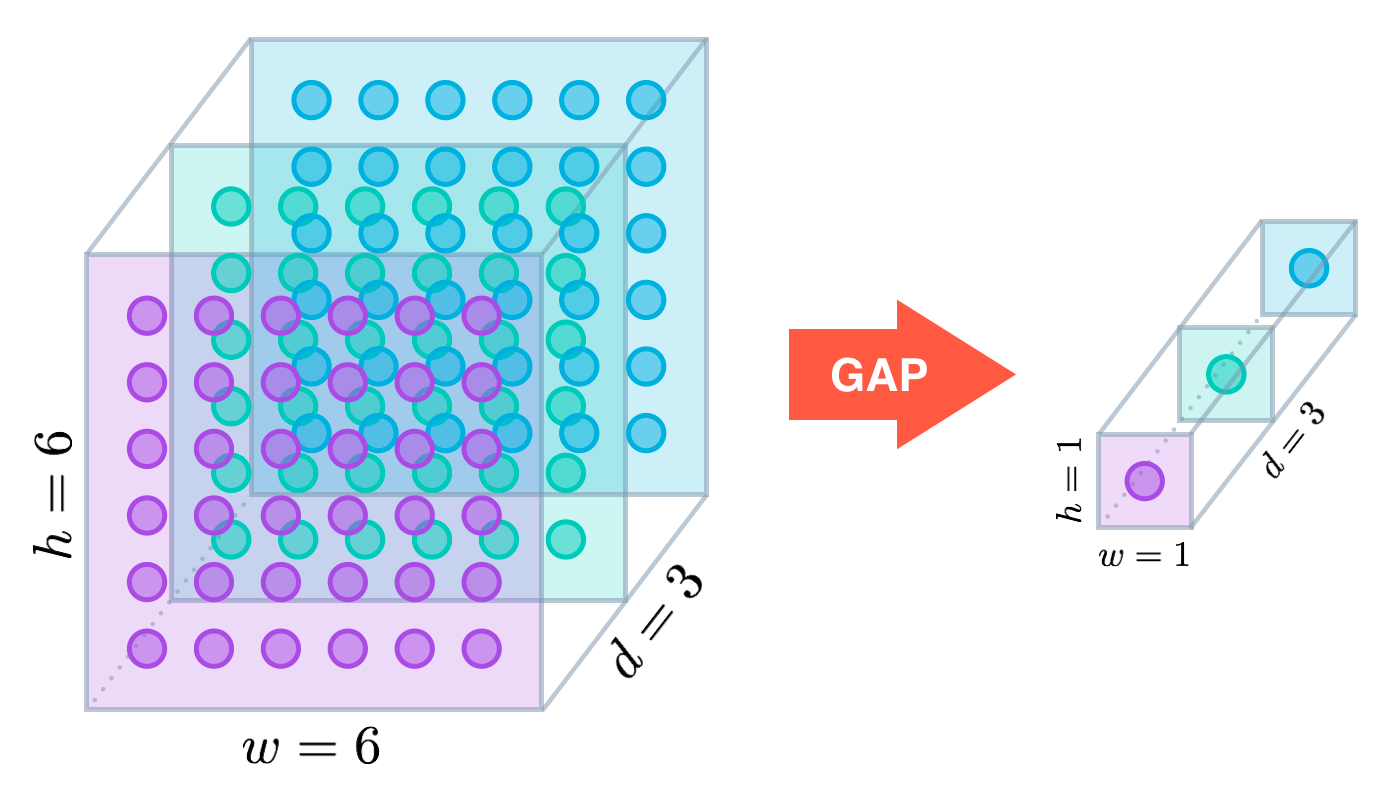
In the last few years, experts have turned to global average pooling (GAP) layers to minimize overfitting by reducing the total number of parameters in the model. Similar to max pooling layers, GAP layers are used to reduce the spatial dimensions of a three-dimensional tensor. However, GAP layers perform a more extreme type of dimensionality reduction, where a tensor with dimensions h×w×d" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">h×w×dh×w×d is reduced in size to have dimensions 1×1×d" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">1×1×d1×1×d. GAP layers reduce each h×w" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">h×wh×w feature map to a single number by simply taking the average of all hw" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">hwhw values.
The first paper to propose GAP layers designed an architecture where the final max pooling layer contained one activation map for each image category in the dataset. The max pooling layer was then fed to a GAP layer, which yielded a vector with a single entry for each possible object in the classification task. The authors then applied a softmax activation function to yield the predicted probability of each class. If you peek at the original paper, I especially recommend checking out Section 3.2, titled “Global Average Pooling”.
The ResNet-50 model takes a less extreme approach; instead of getting rid of dense layers altogether, the GAP layer is followed by one densely connected layer with a softmax activation function that yields the predicted object classes.
Object Localization
In mid-2016, researchers at MIT demonstrated that CNNs with GAP layers (a.k.a. GAP-CNNs) that have been trained for a classification task can also be used for object localization. That is, a GAP-CNN not only tells us what object is contained in the image - it also tells us where the object is in the image, and through no additional work on our part! The localization is expressed as a heat map (referred to as a class activation map), where the color-coding scheme identifies regions that are relatively important for the GAP-CNN to perform the object identification task. Please check out the YouTube video below for an awesome demo!
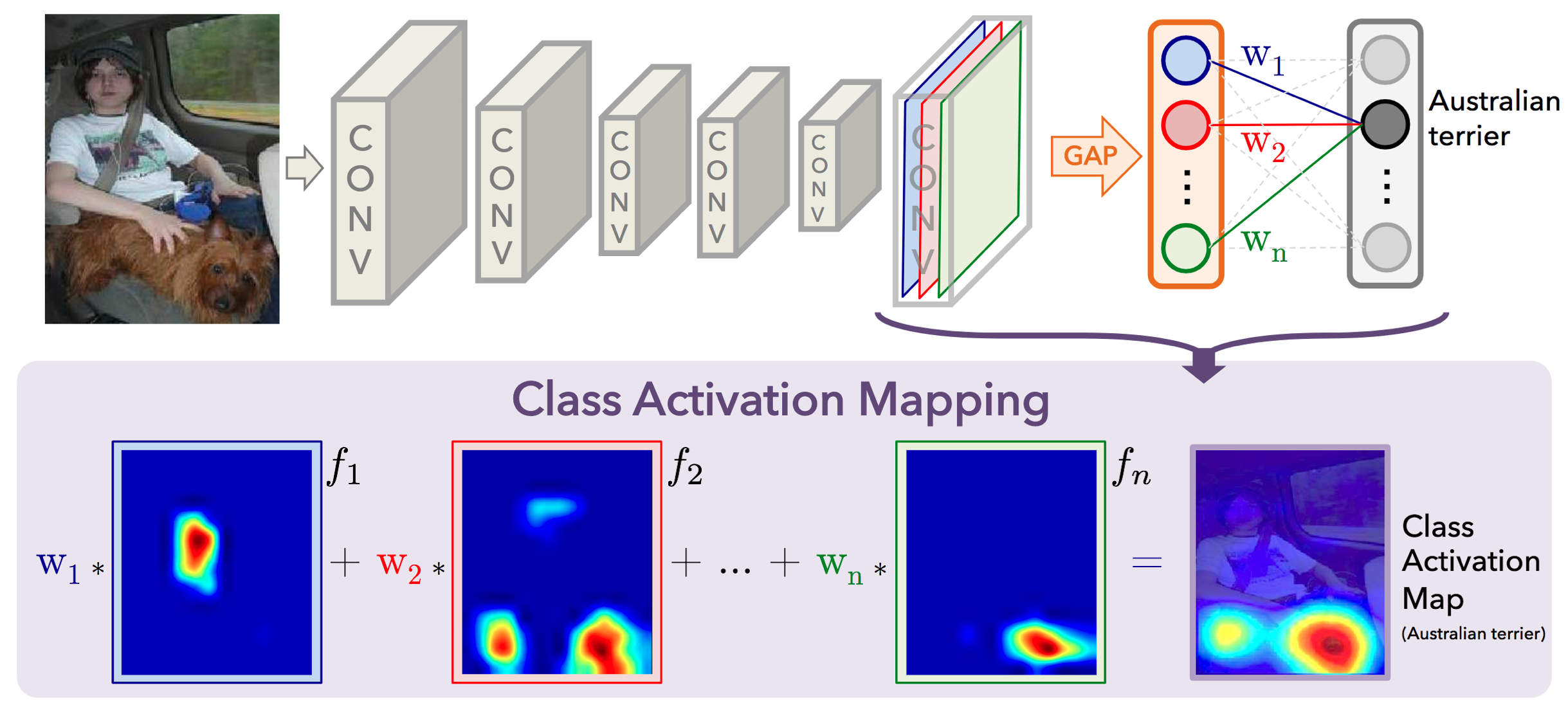
In the repository, I have explored the localization ability of the pre-trained ResNet-50 model, using the technique from this paper. The main idea is that each of the activation maps in the final layer preceding the GAP layer acts as a detector for a different pattern in the image, localized in space. To get the class activation map corresponding to an image, we need only to transform these detected patterns to detected objects.
This transformation is done by noticing each node in the GAP layer corresponds to a different activation map, and that the weights connecting the GAP layer to the final dense layer encode each activation map’s contribution to the predicted object class. To obtain the class activation map, we sum the contributions of each of the detected patterns in the activation maps, where detected patterns that are more important to the predicted object class are given more weight.
How the Code Operates
Let’s examine the ResNet-50 architecture by executing the following line of code in the terminal:
python -c 'from keras.applications.resnet50 import ResNet50; ResNet50().summary()'
The final few lines of output should appear as follows (Notice that unlike the VGG-16 model, the majority of the trainable parameters are not located in the fully connected layers at the top of the network!):
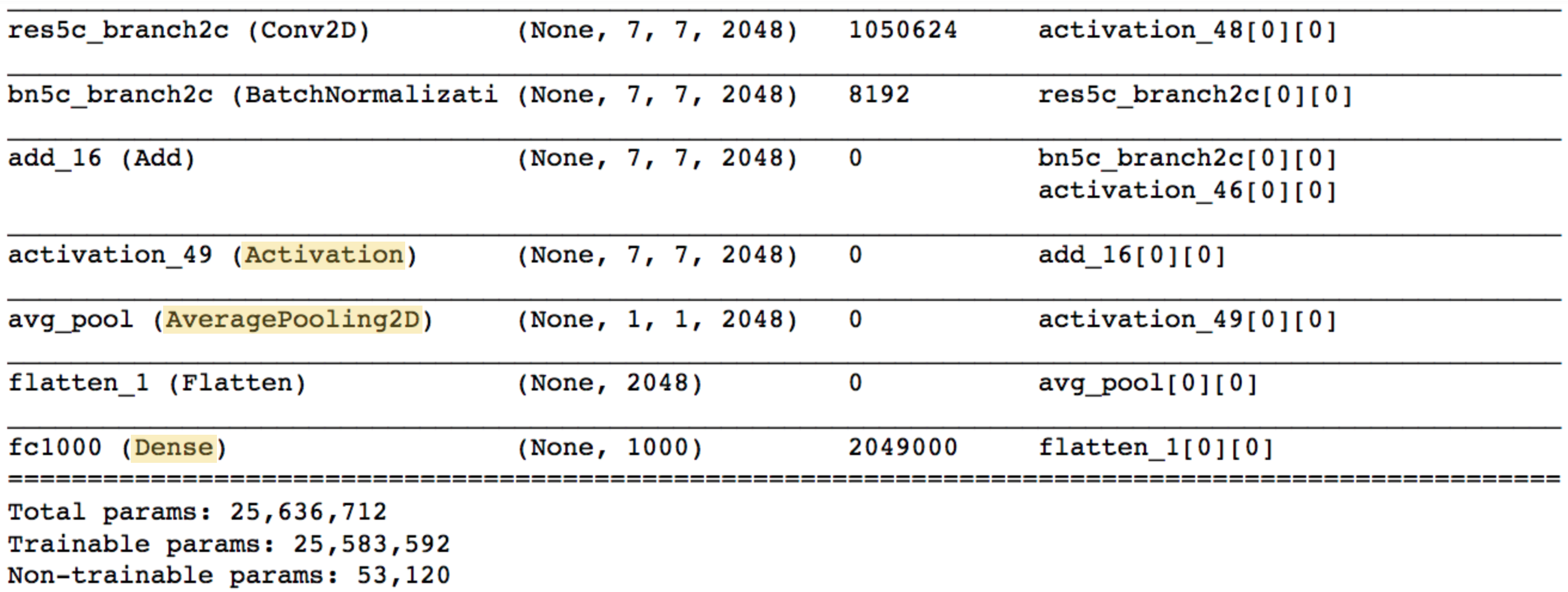
The Activation, AveragePooling2D, and Dense layers towards the end of the network are of the most interest to us. Note that the AveragePooling2D layer is in fact a GAP layer!
We’ll begin with the Activation layer. This layer contains 2048 activation maps, each with dimensions 7×7" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">7×77×7. Let fk" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">fkfk represent the k" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">kk-th activation map, where k∈{1,…,2048}" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">k∈{1,…,2048}k∈{1,…,2048}.
The following AveragePooling2D GAP layer reduces the size of the preceding layer to (1,1,2048)" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">(1,1,2048)(1,1,2048) by taking the average of each feature map. The next Flatten layer merely flattens the input, without resulting in any change to the information contained in the previous GAP layer.
The object category predicted by ResNet-50 corresponds to a single node in the final Dense layer; and, this single node is connected to every node in the preceding Flattenlayer. Let wk" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">wkwk represent the weight connecting the k" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">kk-th node in the Flatten layer to the output node corresponding to the predicted image category.
Then, in order to obtain the class activation map, we need only compute the sum
w1⋅f1+w2⋅f2+…+w2048⋅f2048" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">w1⋅f1+w2⋅f2+…+w2048⋅f2048w1⋅f1+w2⋅f2+…+w2048⋅f2048.
You can plot these class activation maps for any image of your choosing, to explore the localization ability of ResNet-50. Note that in order to permit comparison to the original image, bilinear upsampling is used to resize each activation map to 224×224" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">224×224224×224. (This results in a class activation map with size 224×224" style="margin: 0px; padding: 0px; border: 0px; font-style: normal; font-variant: inherit; font-weight: normal; font-stretch: inherit; line-height: normal; font-family: inherit; vertical-align: baseline; display: inline; text-indent: 0px; text-align: left; text-transform: none; letter-spacing: normal; word-spacing: normal; word-wrap: normal; white-space: nowrap; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; position: relative;">224×224224×224.)
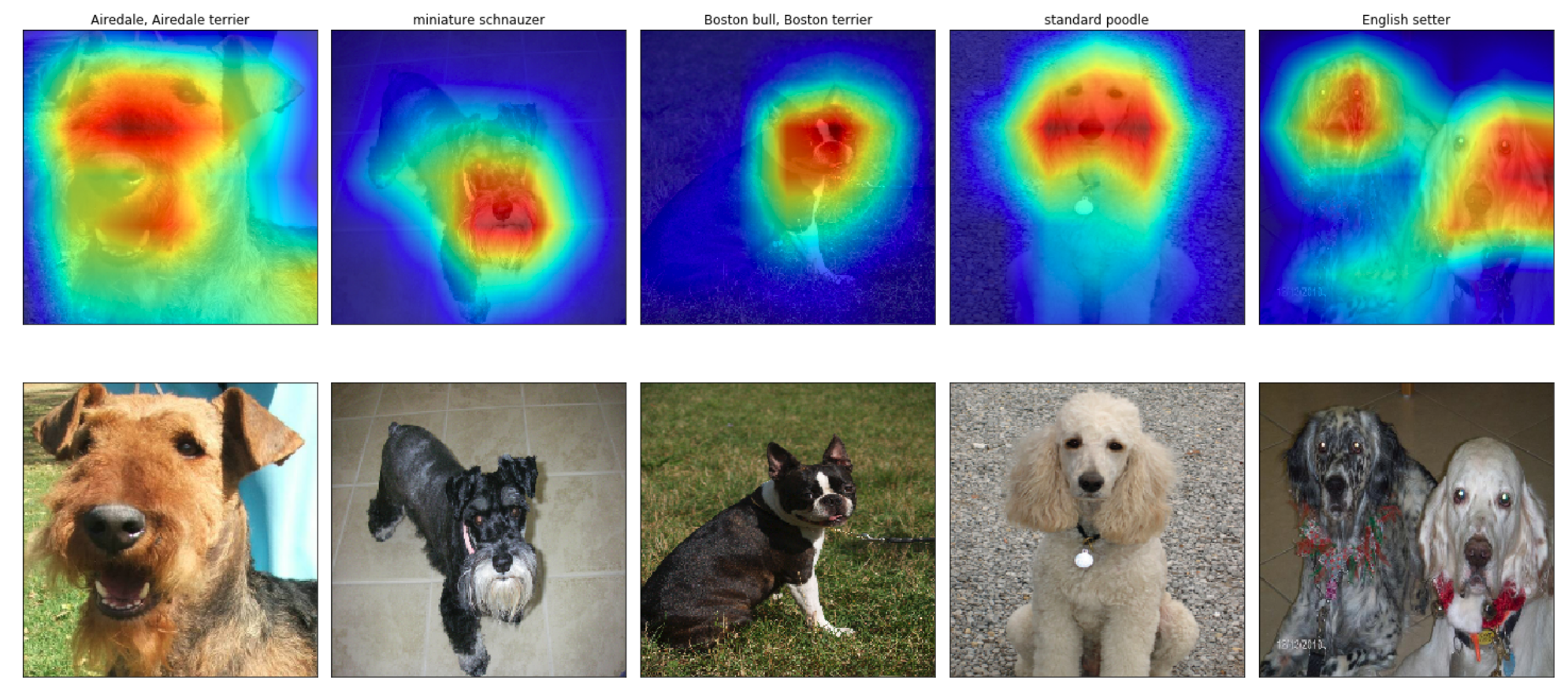
If you’d like to use this code to do your own object localization, you need only download the repository.
Global Average Pooling Layers for Object Localization的更多相关文章
- 深度学习基础系列(十)| Global Average Pooling是否可以替代全连接层?
Global Average Pooling(简称GAP,全局池化层)技术最早提出是在这篇论文(第3.2节)中,被认为是可以替代全连接层的一种新技术.在keras发布的经典模型中,可以看到不少模型甚至 ...
- 深度拾遗(06) - 1X1卷积/global average pooling
什么是1X1卷积 11的卷积就是对上一层的多个feature channels线性叠加,channel加权平均. 只不过这个组合系数恰好可以看成是一个11的卷积.这种表示的好处是,完全可以回到模型中其 ...
- 深度学习方法(十):卷积神经网络结构变化——Maxout Networks,Network In Network,Global Average Pooling
欢迎转载,转载请注明:本文出自Bin的专栏blog.csdn.net/xbinworld. 技术交流QQ群:433250724,欢迎对算法.技术感兴趣的同学加入. 最近接下来几篇博文会回到神经网络结构 ...
- Network in Network(2013),1x1卷积与Global Average Pooling
目录 写在前面 mlpconv layer实现 Global Average Pooling 网络结构 参考 博客:blog.shinelee.me | 博客园 | CSDN 写在前面 <Net ...
- [CVPR2015] Is object localization for free? – Weakly-supervised learning with convolutional neural networks论文笔记
p.p1 { margin: 0.0px 0.0px 0.0px 0.0px; font: 13.0px "Helvetica Neue"; color: #323333 } p. ...
- 论文笔记之:Active Object Localization with Deep Reinforcement Learning
Active Object Localization with Deep Reinforcement Learning ICCV 2015 最近Deep Reinforcement Learning算 ...
- [CVPR2017] Deep Self-Taught Learning for Weakly Supervised Object Localization 论文笔记
http://openaccess.thecvf.com/content_cvpr_2017/papers/Jie_Deep_Self-Taught_Learning_CVPR_2017_paper. ...
- 【37】池化层讲解(Pooling layers)
池化层(Pooling layers) 除了卷积层,卷积网络也经常使用池化层来缩减模型的大小,提高计算速度,同时提高所提取特征的鲁棒性,我们来看一下. 先举一个池化层的例子,然后我们再讨论池化层的 ...
- Spark UDAF实现举例 -- average pooling
目录 1.UDAF定义 2.向量平均(average pooling) 2.1 average的并行化 2.2 代码实现 2.3 使用 参考 1.UDAF定义 spark中的UDF(UserDefin ...
随机推荐
- 【bzoj4259】 残缺的字符串 FFT
又是一道FFT套路题 思路可以参考bzoj4503,题解 我们对串S和串T中出现的*处全部赋值为0. 反正最终的差异度式子大概就是 $C[i]=\sum_{j=0}^{|T|-1}S[i+j]T[j] ...
- spring基础回顾
1.什么是Spring框架?Spring框架有哪些主要模块? Spring框架是一个为Java应用程序的开发提供了综合.广泛的基础性支持的Java平台.Spring帮助开发者解决了开发中基础性的问题, ...
- 1301班 github安装及账户注册
1.下载github 下载地址: http://git-scm.com/download/ 2.账号注册 进入:mukever.online 在右下角的“New user? Create an acc ...
- 分区助手官网使用教程(专业版、绿色版和WinPE版)(图文详解)
不多说,直接上干货! 详情见 http://www.disktool.cn/jiaocheng/index.html http://www.disktool.cn/jiaocheng/index2.h ...
- C/C++ -- Gui编程 -- Qt库的使用 -- 使用图片与动画
QWidget工程 #include "mywidget.h" #include "ui_mywidget.h" #include <QLabel> ...
- springboot-9-在springboot中引入bean
在非spring管理的包中引入spring管理的类, 可以使用一个类继承ApplicationContextAware即可 分两种, 第一种该类在spring的包扫描范围之下: package com ...
- 什么是Java序列化?为什么序列化?序列化有哪些方式?
先普及一下,计算机中无法识别一个基本单元[字节]来表示,必须经过“翻译”才能让计算机理解人类的语言,这个翻译过程就是[编码],通常所说的字符转换为字节. 有I/O的地方机就会涉及编码,现在几乎所有的 ...
- python迭代器、生成器、装饰器
1 迭代器 这里我们先来回顾一下什么是可迭代对象(Iterable)? 可以直接作用于for循环的对象统称为可迭代对象,即Iterable. # 一是集合数据类型,如list.tuple.dict.s ...
- C语言——<计算>_较大两个数相乘
例题:9876543210*1234567890 的乘积 分析:正常的数据结构已经无法满足这么大的数相乘的结果.只能使用数组来进行操作. 1.两个数都用字符数组来接收. 2.接收后,因为每一位要乘以另 ...
- [CQOI 2018]解锁屏幕
Description 题库链接 给出平面上 \(n\) 个点,一开始你可以选任何一个点作为起点,接着对于每一个你在的位置,你可以选取一个未走过的点.将路径(线段)上所有的点均选上(包括起点终点),并 ...