OpenCV 3.0.0处理鱼眼镜头信息 - Fisheye camera model
此篇随笔主要参考OpenCV 3.0.0的官方文档翻译而来,主要用作理解OpenCV对鱼眼相机的标定、图像校正、3D重建功能的理解。
版权所有,转载请注明出处~
xzrch@2018.09.29
参考链接:https://docs.opencv.org/3.0.0/db/d58/group__calib3d__fisheye.html#gad626a78de2b1dae7489e152a5a5a89e1
---------------------------------------------------------------------
Namespace
cv::fisheye
枚举类型
enum {
cv::fisheye::CALIB_USE_INTRINSIC_GUESS = ,
cv::fisheye::CALIB_RECOMPUTE_EXTRINSIC = ,
cv::fisheye::CALIB_CHECK_COND = ,
cv::fisheye::CALIB_FIX_SKEW = ,
cv::fisheye::CALIB_FIX_K1 = ,
cv::fisheye::CALIB_FIX_K2 = ,
cv::fisheye::CALIB_FIX_K3 = ,
cv::fisheye::CALIB_FIX_K4 = ,
cv::fisheye::CALIB_FIX_INTRINSIC =
}
函数
//执行相机标定
double cv::fisheye::calibrate (InputArrayOfArrays objectPoints, InputArrayOfArrays imagePoints, const Size &image_size, InputOutputArray K, InputOutputArray D, OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs, int flags=, TermCriteria criteria=TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, , DBL_EPSILON))
//使用鱼眼模型为2D点叠加畸变效果
void cv::fisheye::distortPoints (InputArray undistorted, OutputArray distorted, InputArray K, InputArray D, double alpha=)
//为去畸变和图像校正估计新的相机矩阵
void cv::fisheye::estimateNewCameraMatrixForUndistortRectify (InputArray K, InputArray D, const Size &image_size, InputArray R, OutputArray P, double balance=0.0, const Size &new_size=Size(), double fov_scale=1.0)
//通过cv::remap()计算去畸变和图像校正的映射,如果D为空,则使用零失真;如果R为空,则使用单位矩阵
void cv::fisheye::initUndistortRectifyMap (InputArray K, InputArray D, InputArray R, InputArray P, const cv::Size &size, int m1type, OutputArray map1, OutputArray map2)
//使用鱼眼模型映射点
void cv::fisheye::projectPoints (InputArray objectPoints, OutputArray imagePoints, const Affine3d &affine, InputArray K, InputArray D, double alpha=, OutputArray jacobian=noArray())
void cv::fisheye::projectPoints (InputArray objectPoints, OutputArray imagePoints, InputArray rvec, InputArray tvec, InputArray K, InputArray D, double alpha=, OutputArray jacobian=noArray())
//执行双目相机标定
double cv::fisheye::stereoCalibrate (InputArrayOfArrays objectPoints, InputArrayOfArrays imagePoints1, InputArrayOfArrays imagePoints2, InputOutputArray K1, InputOutputArray D1, InputOutputArray K2, InputOutputArray D2, Size imageSize, OutputArray R, OutputArray T, int flags=fisheye::CALIB_FIX_INTRINSIC, TermCriteria criteria=TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, , DBL_EPSILON))
//执行双目图像校正
void cv::fisheye::stereoRectify (InputArray K1, InputArray D1, InputArray K2, InputArray D2, const Size &imageSize, InputArray R, InputArray tvec, OutputArray R1, OutputArray R2, OutputArray P1, OutputArray P2, OutputArray Q, int flags, const Size &newImageSize=Size(), double balance=0.0, double fov_scale=1.0)
//变换图像以补偿鱼眼图像失真
void cv::fisheye::undistortImage (InputArray distorted, OutputArray undistorted, InputArray K, InputArray D, InputArray Knew=cv::noArray(), const Size &new_size=Size())
//使用鱼眼模型为2D点去畸变
void cv::fisheye::undistortPoints (InputArray distorted, OutputArray undistorted, InputArray K, InputArray D, InputArray R=noArray(), InputArray P=noArray())
详细描述
定义P为3D空间中的一个点,其在世界参考坐标系中的坐标向量为X。那么P点在相机参考坐标系中的坐标可以表示为:
Xc=RX+T
其中R是旋转向量,将此坐标的三个维度分别用x、y、z表示,则可知:
x=Xc1
P的小孔成像映射坐标为[a:b],其中:
a=x/z
b=y/z
r^2=a^2+b^2
θ=atan(r)
鱼眼相机的畸变为:
θd=θ(1+k1*θ^2+k2*θ^4+k3*θ^6+k4*θ^8)
考虑畸变后的点的坐标为:
x′=(θd/r)x
y′=(θd/r)y
最终,转换到像素域后,最终的像素点坐标[u,v]为:
u=fx*(x′+αy′)+c*x
v=fy*yy+c*y(此处好像有问题)
枚举类型文档
| Enumerator | |
|---|---|
| CALIB_USE_INTRINSIC_GUESS | |
| CALIB_RECOMPUTE_EXTRINSIC | |
| CALIB_CHECK_COND | |
| CALIB_FIX_SKEW | |
| CALIB_FIX_K1 | |
| CALIB_FIX_K2 | |
| CALIB_FIX_K3 | |
| CALIB_FIX_K4 | |
| CALIB_FIX_INTRINSIC | |
函数详细文档
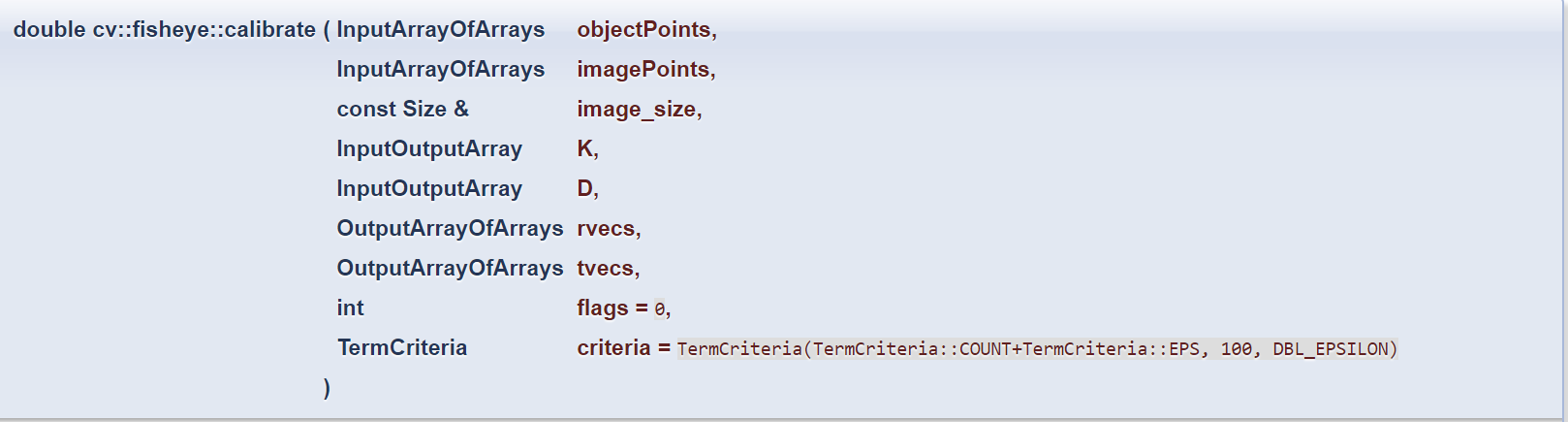
objectPoints: 标定模式坐标空间中的标定模式点向量
imagePoints: 标定模式点的映射结果。对于每个i来说,imagePoints[i].size()与objectPoints[i].size()必须是一样大的。
image_size: 用于初始化相机内参矩阵的图像大小
K: 输出的3*3浮点相机矩阵A(包含fx、fy、cx、cy参数)。如果 fisheye::CALIB_USE_INTRINSIC_GUESS/ 被指定的话,这四个参数当中的所有或一部分需要被事先初始化。
D: 输出的相机畸变系数(k1,k2,k3,k4)
rvecs: 每个pattern view的旋转向量
tvecs: 每个pattern view的平移向量
flags: 不同的标志项代表不同的意义,可以为0或者以下值的若干组合
fisheye::CALIB_USE_INTRINSIC_GUESS :相机矩阵包含事先进一步优化的fx、fy、cx、cy的初始值。如果不选,则cx、cy会被初始化为图像正中心,并且以最小二乘的方式计算焦距。
fisheye::CALIB_RECOMPUTE_EXTRINSIC:每次优化迭代内参后,重新计算外参
fisheye::CALIB_CHECK_COND :函数将检查条件数和合法性
fisheye::CALIB_FIX_SKEW :偏差系数alpha会被置成0,并一直保持在0的状态
fisheye::CALIB_FIX_K1:选中的畸变系数会被置成0并一直保持在0的状态
criteria: 迭代优化算法的终止阈值

undistorted: 物点矩阵,2通道的1*N或N*1向量,或用vector<Point2f>表示。N是可见的点的数量。
distorted: 图像点的输出矩阵,2通道的1*N或N*1向量,或用vector<Point2f>表示。
K: 相机内参矩阵(包含fx、fy、cx、cy参数)
D: 相机畸变系数(k1,k2,k3,k4)
alpha: 偏差系数

K: 相机内参矩阵(包含fx、fy、cx、cy参数)
D: 相机畸变系数(k1,k2,k3,k4)
image_size:
R: 在物体空间的校正变换参数,1通道的3*3数值,或以vector形式表示: 1通道的3*1、1*3 或 3通道的 1*1
P: 新的相机矩阵(3*3)或新的映射矩阵(3*4)
balance: 在最大焦距值和最小焦距值范围之间设置新焦距值
new_size:
fov_scale: 新焦距的除数

K: 相机内参矩阵(包含fx、fy、cx、cy参数)
D: 相机畸变系数(k1,k2,k3,k4)
R: 在物体空间的校正变换参数,1通道的3*3数值,或以vector形式表示: 1通道的3*1、1*3 或 3通道的 1*1
P: 新的相机矩阵(3*3)或新的映射矩阵(3*4)
size: 无畸变的图像大小
m1type: map1的类型,可以是CV_32FC1或者CV_16SC2。
map1: 第一输出map
map2: 第二输出map

objectPoints: 物点向量,3通道的1*N或N*1向量,或用vector<Point3f>表示。N是可见的点的数量。
imagePoints: 像点向量,1通道的2*N/N*2或者2通道的1*N/N*1,或者vector<Point2f>
affine:
K: 相机内参矩阵(包含fx、fy、cx、cy参数)
D: 输入的相机畸变系数(k1,k2,k3,k4)
alpha: 偏差系数
jacobian: 可选的2N*15的雅克比输出矩阵,表示图像点相对于焦距的分量、主点的坐标、失真系数、旋转向量、平移向量、偏差系数等的导数。

objectPoints:
imagePoints1:
imagePoints2:
K1:
D1:
K2:
D2:
iamgeSize:
R:
T:
flags:
criteria;

K1:
D1:
K2:
D2:
imageSize:
R:
tvec:
R1:
R2:
P1:
P2:
Q:
flags:
newImageSize:
balance:
fov_scale:

distorted: 有鱼眼镜头畸变的图像
undistorted: 输出的鱼眼镜头畸变补偿后的图像
K: 相机内参矩阵(包含fx、fy、cx、cy参数)
D: 输入的相机畸变系数(k1,k2,k3,k4)
Knew: 失真图像的相机矩阵,默认情况下,它是单位矩阵,但可以使用其他矩阵来调整输出结果。
new_size: 该功能可以转换图像以补偿径向和切向镜头失真
说明:
这个函数只是简单的将fisheye::initUndistortRectifyMap 和 remap(使用双线性插值) 组合在一起使用。可以看如下的失真校正结果:

distorted: 物点矩阵,2通道的1*N或N*1向量,或用vector<Point2f>表示。N是可见的点的数量。
undistorted: 图像点的输出矩阵,2通道的1*N或N*1向量,或用vector<Point2f>表示。
K: 相机内参矩阵(包含fx、fy、cx、cy参数)
D: 输入的相机畸变系数(k1,k2,k3,k4)
R: 在物体空间的校正变换参数,1通道的3*3数值,或以vector形式表示: 1通道的3*1、1*3 或 3通道的 1*1
P: 新的相机矩阵(3*3)或新的映射矩阵(3*4)
OpenCV 3.0.0处理鱼眼镜头信息 - Fisheye camera model的更多相关文章
- 在Windows下编译扩展OpenCV 3.1.0 + opencv_contrib
为什么要CMake,这里我陈述自己的想法,作为一个刚使用opencv库的小白来说,有以下大概三点内容 1.由于在学习图像处理滤波器中,需要用到各种边缘保护滤波器(EPS)算法,但是这些算法在OpenC ...
- VS2013安装oepncv2.4.10 以及opencv 3.0.0
Author:Maddock Date:2014.12.27 …………………………………………………………………………………………………… PS: VS2013 + OPENCV 3.0.0 的安装, ...
- 【OpenCV】opencv3.0中的SVM训练 mnist 手写字体识别
前言: SVM(支持向量机)一种训练分类器的学习方法 mnist 是一个手写字体图像数据库,训练样本有60000个,测试样本有10000个 LibSVM 一个常用的SVM框架 OpenCV3.0 中的 ...
- Win7 OpenCV 3.0.0 VS2013 环境配置
参考资料:http://jingyan.baidu.com/article/75ab0bcbee4b47d6864db2fc.html 注: x86 x64 这些根据自己的系统以及需求而定, 这里就不 ...
- (win10 64位系统中)Visual Studio 2015+OpenCV 3.3.0环境搭建,100%成功
(win10 64位系统中)Visual Studio 2015+OpenCV 3.3.0环境搭建,100%成功 1.下载opencv 官网http://opencv.org/下载windows版Op ...
- Opencv 3.3.0 常用函数
如何调图像的亮度和对比度? //如何增加图片的对比度或亮度? void contrastOrBrightAdjust(InputArray &src,OutputArray &dst, ...
- 安装cmake 和 opencv 4.0.0
1.安装cmake3.5.1或更新的版本 安装gcc-c++:sudo apt-get install build-essential (或者直接执行这两条命令sudo apt-get install ...
- visual studio 2015 Opencv 3.4.0配置
因为想做AR方面,需要了解计算机视觉知识,决定从opencv开始入门,在网上买了本毛星云的<Opencv3编程入门>开始自学. 一.opencv 3.4.0下载安装 在官网http://o ...
- ubuntu卸载opencv并重装opencv3.0.0
一. 卸载opencv2.4.9: Going to the "build" folder directory of opencv from terminal, and execu ...
随机推荐
- 前端使用ajax传到后台的实体类的多个属性,直接用Map接收
前端ajax传过来的数据按照以上方法接收Map中 var ip = $("#ip").val(); var port = $("#port").val(); v ...
- alibaba--java规范
18. [推荐]final 可以声明类.成员变量.方法.以及本地变量,下列情况使用 final 关键字: 1) 不允许被继承的类,如:String 类. 2) 不允许修改引用的域对象,如:POJO 类 ...
- EF Core中如何通过实体集合属性删除从表的数据
假设在数据库中有两个表:Person表和Book表,Person和Book是一对多关系 Person表数据: Book表数据: 可以看到数据库Book表中所有的数据都属于Person表中"F ...
- 如何在jsp页面获取系统时间
<%@ page import="java.util.*"%> //获取系统时间必须导入的 <%@ page import="java.text.*&q ...
- 课时44.表单标签-input(掌握)
1.什么是表单? 表单是专门用收集用户信息的 2.什么是表单元素? 2.1什么是元素? 在HTML中,标签/标记/元素都是指HTML中的标签 例如: <a>a标签/a标记/a元素 表单元素 ...
- JS其他类型值转化为Boolean类型规则
由于最近在笔试的时候,发现好多关于其他类型转化为Boolean类型的题目,因此总结一下! 一.String类型转化为Boolean 1.转化结果为true的情况 ①任何非空字符串 PS:空白字符串也是 ...
- 08 Oracle表碎片查询以及整理(高水位线)
Oracle表碎片查询以及整理(高水位线) 1.表碎片的来源 当针对一个表的删除操作很多时,表会产生大量碎片.删除操作释放的空间不会被插入操作立即重用,甚至永远也不会被重用. 2.怎样确定是否有表碎片 ...
- 『ACM C++』 PTA 天梯赛练习集L1 | 036-037
这几天比较忙,所以随便做做水题了,得赶紧把英剧搞完啊啊啊啊啊啊 ------------------------------------------------L1-036-------------- ...
- MySQL学习之流程结构
流程结构 流程结构:代码的执行顺序. if分支 根据要求选择合适的执行部分. 基本语法 if在MySQL中有两种基本用法 1.用在select查询当中,当作一种条件来进行判断. 基本语法:if(条件, ...
- MySQL 5.7增强半同步测试
we've know the machenism of semi-synchronous replication in my previous article,let's do som ...