Maths | 相关接收机与最大似然准则
目录
学习《现代通信原理》(曹志刚)时,对其中相关接收机的近似阐述非常不解。借此机会,整理了大量课外资料,对相关接收机的原理有了比较清楚的认识。
一、 接收机的概念
接收机:由信号解调器和检测器组成。
1、信号解调器
功能:将接受波形\(r(t)\)变换为N维向量\(\boldsymbol r=[r_1,r_2,...,r_N]\),N为发送信号波形的维数。
目的:求接受波形在各基向量上的投影,即求\(r_i\)。
实现方式:
- 基于匹配滤波器的实现方法(匹配滤波器)。
- 基于信号相关器的实现方法(相关解调器)。
2、检测器
根据信号解调器输出的N维向量\(r=[r_1,r_2,...,r_N]\),判断发送波形。
发送信号波形的集合为\(\{S_m(t),m=1,2,...,M\}\),维数为N。
二、 相关解调器的解调过程及其原理
1、构造相关解调器
根据发送信号波形集合\(\{S_m(t),m=1,2,...,M\}\),构造正交基\(\{f_n(t),n=1,2,...,n\}\)
要求:每一个\(S_m(t)\)都可以表示为\(\{f_n(t)\}\)的线性加权组合:
\[
S_m(t)=\sum_{k=1}^N {S_{mk}f_k(t)}
\]
其中\(S_{mk}\)是在某个基向量上的幅度(投影)。
注意:尽管接收信号中会叠加信道噪声:
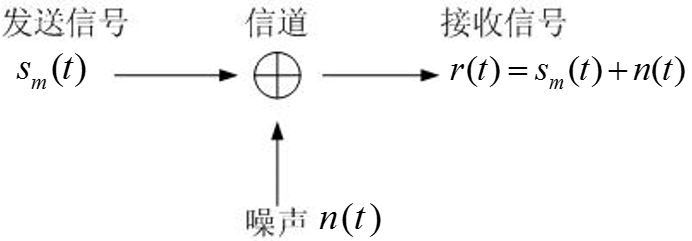
但在构造正交基\(\{f_n(t)\}\)时,我们不考虑噪声空间。
因此接收信号会被分解为:
\[
r(t)=\sum_{k=1}^N {S_{mk}f_k(t)}+n(t)=\sum_{k=1}^N {S_{mk}f_k(t)}+\sum_{k=1}^N {n_kf_k(t)}+n'(t)
\]
其中\(n'(t)\)是无法用基函数组合的噪声组分。
至于为什么不考虑噪声空间,我们马上揭晓。
2、得到接收信号在基向量上的投影
令接收信号\(r(t)\)通过一组并行的N个互相关器:
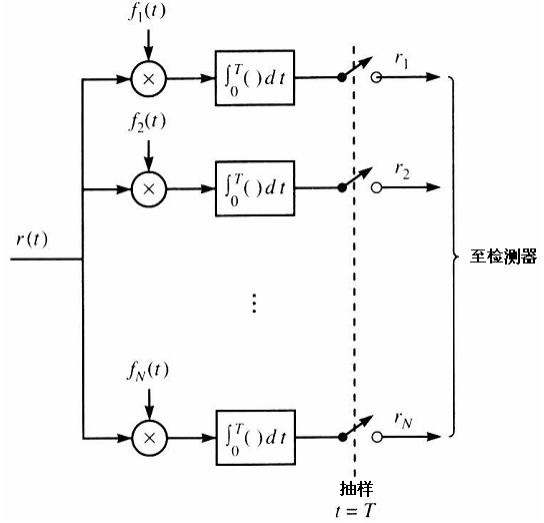
注意:在后面结合检测器,我们会对改图作改进和简化。因此这不是最终电路图!
各个相关器的输出为:
\[
\int_0^T {r(t)f_k(t)dt} = S_{mk}+n_k = r_k
\]
\(S_{mk}\)就是我们想要的投影,\(n_k\)是噪声的投影,是一个高斯随机变量,由信道引入的加性噪声决定。
而无法被基向量表示的\(n'(t)\)(在线性空间外),积分为0(由于噪声均值为0,因此不相关和正交等价),因此对输出没有任何影响!
这就是为什么我们在构造正交基时,不考虑噪声空间!
3、相关器输出的性质
由于\(S_{mk}\)是一个确定的值,而\(n_k\)是一个高斯随机变量,因此:
\(r_k\)也是一个高斯随机变量,其均值为\(S_{mk}\),方差同\(n_k\),为\(\frac{n_0}{2}\)。
因此,相关解调器最终输出的N维向量\(\boldsymbol r=[r_1,r_2,...,r_N]\),其概率满足联合高斯分布:
\[
P(\boldsymbol r|\boldsymbol S_m) = \prod_{k=1}^N {P(r_k|S_{mk})}
\]
\[
= \frac{1}{(\sqrt{2\pi\frac{n_0}{2}})^N}exp[\frac{-\sum_{k=1}^N{(r_k-S_{mk})^2}}{2\frac{n_0}{2}}]
\]
三、检测器的实现及其数学原理
尽管相关器已经为我们得到了一个满足联合高斯分布的N维向量,但由于噪声的存在,为了使判错率最小,我们还需要合理地选出最合适的波形,作为最终判断结果。
1、MAP准则
全称为最大后验概率Maximum A posteriori Probability,其中A posteriori在拉丁文中是“后验”的意思。
根据推导(参见信息论相关书籍),选择后验概率\(P(\boldsymbol S_m|\boldsymbol r)\)最大对应的发送信号\(S_m(t)\)作为判断结果,则错误率最小。
这一点也很好理解。在接收到\(r(t)\)并转换得到\(\boldsymbol r\)的条件下,发送信号最有可能是\(S_m(t)\),那么我们当然选择它作为输出结果啦~
可惜的是,后验概率很难通过电路获得。
因此,我们无法直接利用MAP准则。
2、ML准则
全称为最大似然Maximum Likelihood。
根据贝叶斯公式:
\[
P(\boldsymbol S_m|\boldsymbol r)=\frac{P(\boldsymbol S_m,\boldsymbol r)}{P(\boldsymbol r)}=\frac{P(\boldsymbol r|\boldsymbol S_m)P(\boldsymbol S_m)}{\sum_{i=1}^M{P(\boldsymbol r|S_i)P(S_i)}}
\]
其中:
- \(P(\boldsymbol S_m)\)是先验概率,一般设为等概。
- \(P(\boldsymbol r)=P(\boldsymbol r|S_i)P(S_i)\)与发送信号无关。因为无论发的是哪个\(P(\boldsymbol S_m)\),\(P(\boldsymbol r)\)都是既定的,客观存在且无法改变的。具体而言,其中的先验概率\(P(S_i)\)和发送概率\(P(\boldsymbol r|S_i)\)都不随发送信号的变化而改变。
这么看来,我们有重要结论:
- 当\(P(\boldsymbol S_m)\)等概时,最大的\(P(\boldsymbol S_m|\boldsymbol r)\),对应最大的\(P(\boldsymbol r|\boldsymbol S_m)\)!这就是MAP准则到ML准则的转化!
- 当不等概时,最大的\(P(\boldsymbol S_m|\boldsymbol r)\),对应最大的\(P(\boldsymbol r|\boldsymbol S_m)P(\boldsymbol S_m)\),稍微复杂一些,但也很好求。
先剧透一波,ML准则非常容易通过电路实现!我们接着看~
3、简化ML准则,实现检测器
现在我们讨论\(P(\boldsymbol S_m)\)等概的情况,即ML准则可以使用。
由第一部分我们知道:解调器输出为:
\[
P(\boldsymbol r|\boldsymbol S_m)=\frac{1}{(\sqrt{2\pi\frac{n_0}{2}})^N}exp[\frac{-\sum_{k=1}^N{(r_k-S_{mk})^2}}{2\frac{n_0}{2}}]
\]
我们取对数:
\[
ln[P(\boldsymbol r|\boldsymbol S_m)]=-\frac{N}{2}ln(\pi n_0)-\frac{\sum_{k=1}^N{(r_k-S_{mk})^2}}{n_0}
\]
显然,第一项是常数,对判断发送信号没有贡献。
第二项是关于\(\sum_{k=1}^N{(r_k-S_{mk})^2}\)单调的函数。
因此,最大后验概率,对应着最小的欧氏距离:
\[
D(\boldsymbol r,\boldsymbol S_m)=\sum_{k=1}^N{(r_k-S_{mk})^2}
\]
因此,基于ML准则的判决,又称为最小距离检测。
进一步展开、化简得到:
\[
D(\boldsymbol r,\boldsymbol S_m)=\sum_{k=1}^N{(r_k)^2}+\sum_{k=1}^N{(S_{mk})^2}-2\sum_{k=1}^N{r_kS_{mk}}
\]
其中,第一项是向量\(\boldsymbol r\)的模值,对判断没有贡献。
第二项是接收信号的能量:\(\varepsilon_m\),与发送信号有关,需要考虑。
第三项是投影,显然也需要考虑:
\[
2\sum_{k=1}^N{r_kS_{mk}}=2\boldsymbol r\bigodot \boldsymbol S_m = 2 \int_0^T {r(t)S_m(t)}dt
\]
我们把需要考虑的后两项的相反数合称为相关度量:
\[
C(\boldsymbol r, \boldsymbol S_m)=2\sum_{k=1}^N{r_kS_{mk}}-\varepsilon_m
\]
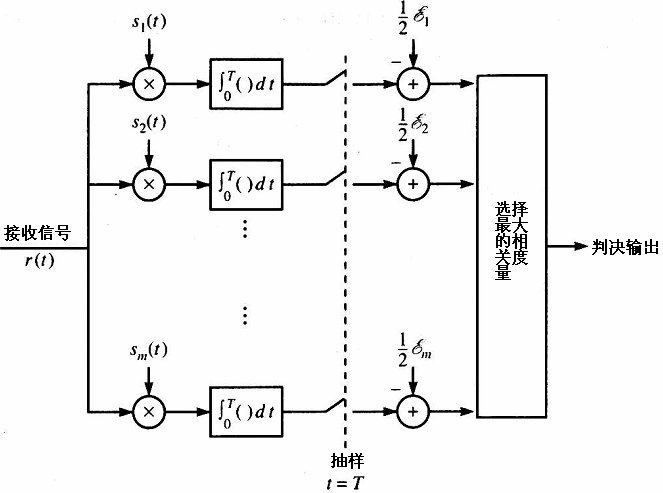
综上,我们得到判断的最终准则:
最大相关度量\(C(\boldsymbol r, \boldsymbol S_m)\)对应的发送信号\(S_m(t)\),就是最终判决结果。
因此,我们希望整个相关接收机实现如下流程:
- 将接收信号\(r(t)\)转换为N维向量\(\boldsymbol r\)
- 求出\(\boldsymbol r\)和各个\(\boldsymbol S_m\)的相关度量\(C(\boldsymbol r, \boldsymbol S_m)\)
- 选择最大相关度量对应的发送信号波形\(S_m(t)\)输出
最终电路图(相关接收机)如下:
如果发送波形不等概率,那么MAP准则就不可以直接转换为ML准则啦。此时只需要寻找最大\(P(\boldsymbol r|\boldsymbol S_m)P(\boldsymbol S_m)\)对应的发送波形,化简方式类似,这里就不赘述了。
Maths | 相关接收机与最大似然准则的更多相关文章
- 参数估计:最大似然估计MLE
http://blog.csdn.net/pipisorry/article/details/51461997 最大似然估计MLE 顾名思义,当然是要找到一个参数,使得L最大,为什么要使得它最大呢,因 ...
- 一种利用 Cumulative Penalty 训练 L1 正则 Log-linear 模型的随机梯度下降法
Log-Linear 模型(也叫做最大熵模型)是 NLP 领域中使用最为广泛的模型之一,其训练常采用最大似然准则,且为防止过拟合,往往在目标函数中加入(可以产生稀疏性的) L1 正则.但对于这种带 L ...
- 一个用 Cumulative Penalty 培训 L1 正规 Log-linear 型号随机梯度下降
Log-Linear 模型(也叫做最大熵模型)是 NLP 领域中使用最为广泛的模型之中的一个.其训练常採用最大似然准则.且为防止过拟合,往往在目标函数中增加(能够产生稀疏性的) L1 正则.但对于 ...
- 【论文:麦克风阵列增强】Speech Enhancement Based on the General Transfer Function GSC and Postfiltering
作者:桂. 时间:2017-06-06 16:10:47 链接:http://www.cnblogs.com/xingshansi/p/6951494.html 原文链接:http://pan.ba ...
- 论文笔记:Chaotic Invariants of Lagrangian Particle Trajectories for Anomaly Detection in Crowded Scenes
[原创]Liu_LongPo 转载请注明出处 [CSDN]http://blog.csdn.net/llp1992 近期在关注 crowd scene方面的东西.由于某些原因须要在crowd scen ...
- OpenCV相机标定
标签(空格分隔): Opencv 相机标定是图像处理的基础,虽然相机使用的是小孔成像模型,但是由于小孔的透光非常有限,所以需要使用透镜聚焦足够多的光线.在使用的过程中,需要知道相机的焦距.成像中心以及 ...
- 浅议极大似然估计(MLE)背后的思想原理
1. 概率思想与归纳思想 0x1:归纳推理思想 所谓归纳推理思想,即是由某类事物的部分对象具有某些特征,推出该类事物的全部对象都具有这些特征的推理.抽象地来说,由个别事实概括出一般结论的推理称为归纳推 ...
- Reading | 《DEEP LEARNING》
目录 一.引言 1.什么是.为什么需要深度学习 2.简单的机器学习算法对数据表示的依赖 3.深度学习的历史趋势 最早的人工神经网络:旨在模拟生物学习的计算模型 神经网络第二次浪潮:联结主义connec ...
- Reading | 《TensorFlow:实战Google深度学习框架》
目录 三.TensorFlow入门 1. TensorFlow计算模型--计算图 I. 计算图的概念 II. 计算图的使用 2.TensorFlow数据类型--张量 I. 张量的概念 II. 张量的使 ...
随机推荐
- css变换与动画详解
举个栗子:--------元素整体居中.box{ position:absolute;top:50%;left:50%; width:50px; height:50px; t ...
- Android ScrollView嵌套Recyclerview滑动卡顿,松手即停问题解决;
假如你的布局类似这样的: <ScrollView android:layout_width="match_parent" android:layout_height=&quo ...
- spring 大会的启示
1.事件驱动的微服务编程 2.无服务架构的编程模型 3.微服务缓存
- 第一篇、Python初识
1.Python文件后缀是否可以任意? 单独执行的时候没关系,但当文件需要导入(即导入模块)的时候,如果不是py后缀的,会出错. 2.执行方法 1) python +文件路径 python + fil ...
- js 模拟css3 动画1
<html> <head> <title> javaScript缓动入门 </title> </head> <body> < ...
- Spring 4 官方文档学习 Web MVC 框架
1.介绍Spring Web MVC 框架 Spring Web MVC 框架是围绕DispatcherServlet设计的,所谓DispatcherServlet就是将请求分发到handler,需要 ...
- javascript中的getter和setter
在ECMAScript 5中,属性值可以用一个或两个方法代替,这两个方法就是getter和setter var man = { name : 'lidg', weibo : '@lidg', get ...
- 【Django】RROR 2003 (HY000): Can't connect to MySQL server on 'localhost' (10061)
刚刚启动项目的时候,突然报了这个错误.之前一直正常 后来百度一下,让我在window的host文件下,把被注释的127.0.0.1 localhost这个的注释取消 然鹅并木有用 直接用cmd连接 ...
- python中获取python版本号的方法
import platform print platform.python_version()
- oracle 新增并返回新增的主键
oracle 的insert into 语句需要返回新增的主键的时候,可以使用一下insert 语法: insert into ims.t_bank_inquire_results (t_date,l ...