ROS入门学习(基于Ubuntu16.04+kinetic)
本文主要部分全部来源于ROS官网的Tutorials.
Setup
roscore # making sure that we have roscore running
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key # Now you can use the arrow keys of the keyboard to drive the turtle around.
ROS Topics
sudo apt-get install ros-kinetic-rqt
sudo apt-get install ros-kinetic-rqt-common-plugins
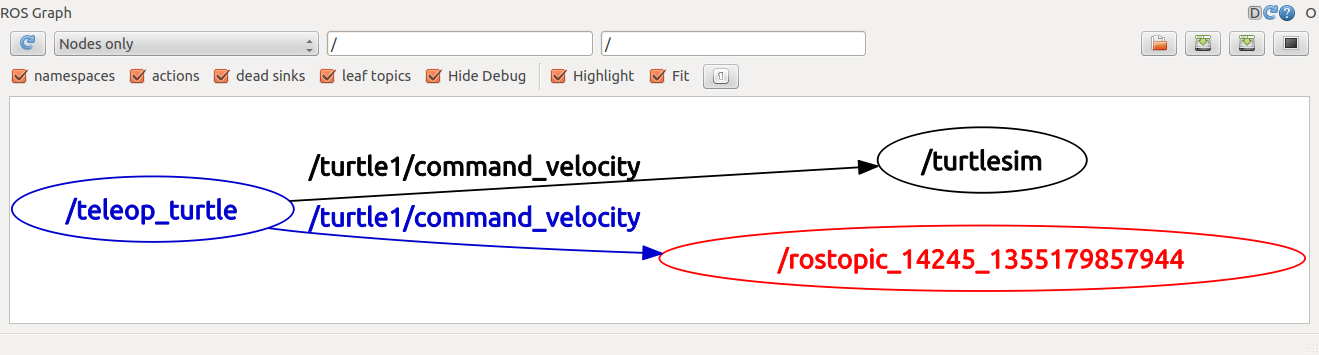
rosrun rqt_graph rqt_graph
rostopic -h
rostopic echo /turtle1/cmd_vel # you will now see topic datas when you press the arrow key in turtle_teleop_key terminal
rostopic list -h # figure out what argument the list sub-command needs
rostopic list -v # displays a verbose list of topics to publish to and subscribe to and their type
rostopic type /turtle1/cmd_vel # You should get the message type of the topic: geometry_msgs/Twist
rosmsg show geometry_msgs/Twist # look at the details of the message using rosmsg
Using rostopic pub
# publishes data on to a topic, rostopic pub [topic] [msg_type] [args]
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
# publishes the velocity commands at a rate of 1 Hz on the velocity topic
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
# Now We can also look at what is happening in rqt_graph.
# and see the data published by our turtlesim
rostopic echo /turtle1/pose
# see how fast the turtlesim_node is publishing /turtle1/pose, $ rostopic hz [topic]
rostopic hz /turtle1/pose
# get in depth information about a topic
rostopic type /turtle1/cmd_vel | rosmsg show
Using rqt_plot
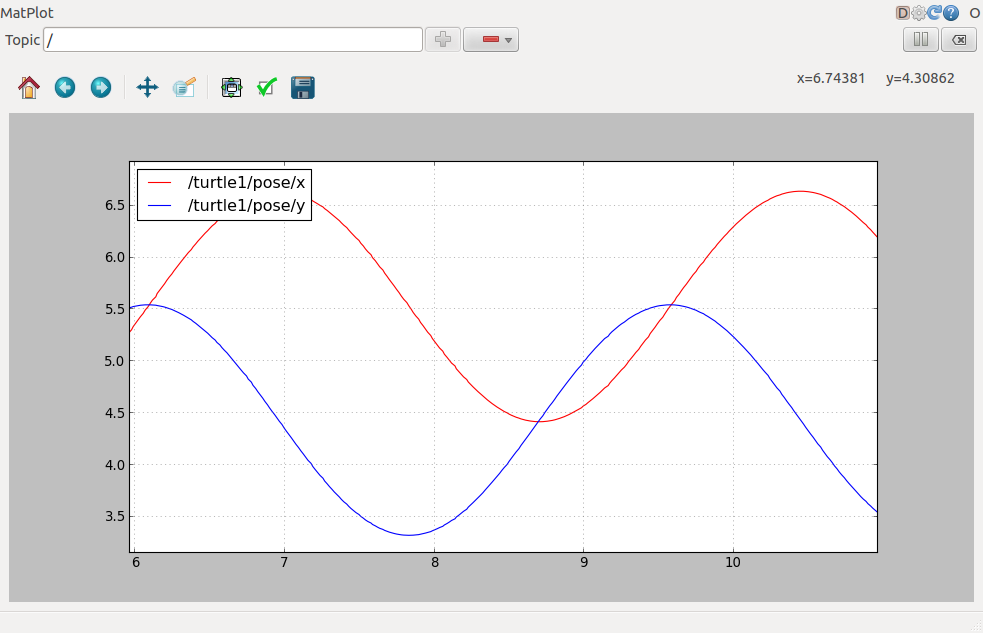
rosrun rqt_plot rqt_plot
# a text box in the upper left corner gives you the ability to add any topic to the plot.
# Typing /turtle1/pose/x and add it.
# Typing /turtle1/pose/y and add it.
ROS Services and Parameters
rosservice list # shows us that the turtlesim node provides nine services
rosservice type /clear # find out what type the clear service is
rosservice call /clear # clears the background of the turtlesim_node # look at the case where the service has arguments by looking at the information for the service spawn
rosservice type /spawn | rossrv show
rosservice call /spawn 2 2 0.2 "" # spawn a new turtle at a given location and orientation rosparam list # look at what parameters are currently on the param server
rosparam set /background_r 150 # change the red channel of the background color
rosservice call /clear # call the clear service for the parameter change to take effect
rosparam get /background_g # get the value of the green background channel
rosparam get / # show us the contents of the entire Parameter Serve rosparam dump params.yaml # write all the parameters to the file ./params.yaml (current directory)
rosparam load params.yaml copy # load these yaml files into new namespaces
rosparam get /copy/background_b
Using rqt_console and roslaunch
This tutorial introduces ROS using rqt_console and rqt_logger_level for debugging and roslaunch for starting many nodes at once.
sudo apt-get install ros-kinetic-rqt ros-kinetic-rqt-common-plugins ros-kinetic-turtlesim # in two new terminals start rqt_console and rqt_logger_level
rosrun rqt_console rqt_console
rosrun rqt_logger_level rqt_logger_level rosrun turtlesim turtlesim_node # Since the default logger level is INFO you will see any info that the turtlesim publishes when it starts up
roscd beginner_tutorials
mkdir launch
cd launch
gedit turtlemimic.launch
<launch> <group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group> <group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group> <node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node> </launch>
roslaunch beginner_tutorials turtlemimic.launch
rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]' # the two turtlesims start moving even though the publish command is only being sent to turtlesim1
Using rosed to edit files in ROS
rosed roscpp Logger.msg # demonstrates how you would edit the Logger.msg file within the roscpp package rosed roscpp <tab><tab> # tab auto complete echo "export EDITOR='gedit -w'" >> ~/.bashrc
source ~/.bashrc
echo $EDITOR
rosed roscpp Logger.msg # This time file will be open by The more beginner-friendly editor
Creating a ROS msg and srv
- msg: msg files are simple text files that describe the fields of a ROS message. They are used to generate source code for messages in different languages.
- srv: an srv file describes a service. It is composed of two parts: a request and a response.
Aboat Msg
$ roscd beginner_tutorials
$ mkdir msg
$ echo "int64 num" > msg/Num.msg rosed beginner_tutorials package.xml
Open package.xml, and make sure these two lines are in it.
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
rosed beginner_tutorials CMakeLists.txt
Modify it like this:
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
...
catkin_package(
...
CATKIN_DEPENDS message_runtime ...
...)
...
add_message_files(
FILES
Num.msg
)
...
generate_messages(
DEPENDENCIES
std_msgs
)
...
Make sure ROS can see it.
rosmsg show beginner_tutorials/Num # You will see: int64 num
rosmsg show Num # You will see: [beginner_tutorials/Num]: int64 num
Aboat srv
$ roscd beginner_tutorials
$ mkdir srv
$ roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
$ rosed beginner_tutorials CMakeLists.txt
Modify it like this:
...
add_service_files(
FILES
AddTwoInts.srv
)
...
make sure that ROS can see it using the rossrv show command
rossrv show beginner_tutorials/AddTwoInts
rossrv show AddTwoInts
Now that we have made some new messages we need to make our package again:
$ roscd beginner_tutorials
$ cd ../..
$ catkin_make install
$ cd -
Any .msg file in the msg directory will generate code for use in all supported languages. The C++ message header file will be generated in ~/catkin_ws/devel/include/beginner_tutorials/.
rosmsg -h
Review
Let's just list some of the commands we've used so far:
- rospack = ros+pack(age) : provides information related to ROS packages
roscd = ros+cd : changes directory to a ROS package or stack
rosls = ros+ls : lists files in a ROS package
roscp = ros+cp : copies files from/to a ROS package
- rosmsg = ros+msg : provides information related to ROS message definitions
- rossrv = ros+srv : provides information related to ROS service definitions
- catkin_make : makes (compiles) a ROS package
- rosmake = ros+make : makes (compiles) a ROS package (if you're not using a catkin workspace)
ROS入门学习(基于Ubuntu16.04+kinetic)的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 基于ubuntu16.04部署IBM开源区块链项目-弹珠资产管理(Marbles)
前言 本教程基本上是对Marbles项目的翻译过程. 如果英文比较好的话,建议根据官方操作说明,一步步进行环境部署.当然你也可以参考本教程在自己的主机上部署该项目. Marbles 介绍 关于 Mar ...
- 基于ubuntu16.04快速构建Hyperledger Fabric网络
前言 最近在参加一个比赛,使用到了区块链的开源软件hyperledger,由于之前从未接触过区块链,以及和区块链开发相关的内容,所有在网上查阅了大量的资料,并且通过学习yeasy(杨宝华)开源的入门书 ...
- ROS入门学习
ROS学习笔记 ROS入门网站; ROS入门书籍 ROS主要包含包括功能包.节点.话题.消息类型和服务; ROS功能包/软件包(Packages) ROS软件包是一组用于实现特定功能的相关文件的集合, ...
- C#码农的大数据之路 - 使用Ambari自动化安装HDP2.6(基于Ubuntu16.04)并运行.NET Core编写的MR作业
准备主机 准备3台主机,名称作用如下: 昵称 Fully Qualified Domain Name IP 作用 Ubuntu-Parrot head1.parrot 192.168.9.126 Am ...
- 基于Ubuntu16.04的GeForce GTX 1080驱动安装,遇到的问题及对应的解决方法
1.在主机上插上GPU之后,查看设备: $ nvidia-smi Tue Dec :: +------------------------------------------------------- ...
- Kubernetes入门学习--在Ubuntu16.0.4安装配置Minikube
目 录 一. 安装minikube环境 1.1. 安装前准备 1.2. 安装Lantern 1.2.1. Lantern下载网站 1.2.2. Lantern下载地址 1.2.3. Lantern安装 ...
- 深度学习caffe:Ubuntu16.04安装指南(1)
caffe [CPU ONLY] 2017-01-15 最简单的安装配置方式: 不用GPU加速,使用OPENCV2.4图像库, 这是根据官方教程(链接如下)简化而得到. Ubuntu 16.04 or ...
- Hadoop完全分布式环境搭建(三)——基于Ubuntu16.04安装和配置Java环境
[系统环境] 1.宿主机OS:Win10 64位 2.虚拟机软件:VMware WorkStation 12 3.虚拟机OS:Ubuntu16.04 4.三台虚拟机 5.JDK文件:jdk-8u201 ...
随机推荐
- string子串匹配(用string自带函数,不涉及char数组转换)
using namespace std; #include <iostream> #include<string> //第1种,用string自带的s.subdtr()截取任意 ...
- [Vue warn]: Invalid prop: type check failed for prop "percentage". Expected Number, got Null
Vue组件报错 <ElProgress> at packages/progress/src/progress.vue 用了element组件 绑定数据时后端给我们传的参数为null,所以组 ...
- 1.1 MATLAB系统环境
专题一 MATLAB基础知识 1.1 MATLAB系统环境 1. 续行符(三个点) 2. 当前文件夹 先建立当前文件夹,再cd 3.工作区窗口 4.搜索路径 01当前文件夹下的程序文件 变 ...
- vsCode开发flutter项目
Visual Studio Code 安装: 下载链接:https://code.visualstudio.com/ 下载完成后根据步骤自行安装. 使用vsCode开发flutter项目需要部 ...
- Thinkphp中取消url中的index.php 和 Home 默认模块
将配置文件中改: <?phpreturn array( //'配置项'=>'配置值' 'URL_MODEL'=>'2', //去掉url中index.php ' ...
- 开源与Saas,如何选择软件?
随着云计算的发展和普及,在云上使用软件已经成为了主流,为了帮助广大用户理解,我在这里对云上软件的三种主要形态以及如何做出选择做一个简单的分析. 开源免费软件 绝大部分开源软件都是免费的,免费的出发点有 ...
- 记录21.07.23 —— Vue.js基础(二)
Vue基础(二) 过滤器 过滤器作用 全局过滤器 输出结果 私有过滤器 输出结果 把其中一个做点修改 错误信息 自定义指令 全局自定义指令 私有自定义指令 钩子函数 注意:fond-weight是粗细 ...
- MongoDB 批量插入和循环插入性能测试
一万条数据批量插入和循环插入 循环插入 var startTime = (new Date()).getTime() var db = connect('log') for(var i = 0;i&l ...
- Logback 快速入门 / 使用详解
官方文档: http://logback.qos.ch/manual/index.html 一.简介 Java 开源日志框架,以继承改善 log4j 为目的而生,是 log4j 创始人 Ceki Gü ...
- Java容器学习——List
Java容器学习--List 基础知识 数组: 优点:随机存取,可以快速访问元素 缺点:静态分配内存,存在空间闲置或者溢出现象:不适合进行插入和删除操作,需要移动大量元素. 链表: 优点: ...