PCL贪婪投影三角化算法
贪婪投影三角化算法是一种对原始点云进行快速三角化的算法,该算法假设曲面光滑,点云密度变化均匀,不能在三角化的同时对曲面进行平滑和孔洞修复。
方法:
(1)将三维点通过法线投影到某一平面
(2)对投影得到的点云作平面内的三角化
(3)根据平面内三位点的拓扑连接关系获得一个三角网格曲面模型
在平面区域的三角化过程中用到了基于Delaunay的空间区域增长算法,该方法通过选取一个样本三角片作为初始曲面,不断扩张曲面边界,最后形成一张完整的三角网格曲面,最后根据投影点云的连接关系确定各原始三维点间的拓扑连接,所得的三角网格即为重建得到的曲面模型。
该算法适用于采样点云来自表面连续光滑的曲面且点云的密度变化比较均匀的情况
pcl1.8.1+vs2015
#include<iostream>
#include<pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include<pcl/point_types.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/features/normal_3d.h>
#include <pcl/io/obj_io.h>
#include <pcl/surface/gp3.h>
#include <pcl/visualization/pcl_visualizer.h> int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
pcl::PCLPointCloud2 cloud_blob;
//*打开点云文件
if (pcl::io::loadPCDFile("rabbit.pcd", cloud_blob) == -1) {
PCL_ERROR("Couldn't read file rabbit.pcd\n");
return(-1);
}
pcl::fromPCLPointCloud2(cloud_blob, *cloud); //法线估计对象
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> n;
//存储估计的法线
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
//定义kd树指针
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
n.setInputCloud(cloud);
n.setSearchMethod(tree);
n.setKSearch(20);
//估计法线存储到其中
n.compute(*normals);//Concatenate the XYZ and normal fields*
pcl::PointCloud<pcl::PointNormal>::Ptr cloud_width_normals(new pcl::PointCloud<pcl::PointNormal>);
//链接字段
pcl::concatenateFields(*cloud, *normals, *cloud_width_normals); //定义搜索树对象
pcl::search::KdTree<pcl::PointNormal>::Ptr tree2(new pcl::search::KdTree<pcl::PointNormal>);
//点云构建搜索树
tree2->setInputCloud(cloud_width_normals); //定义三角化对象
pcl::GreedyProjectionTriangulation<pcl::PointNormal> gp3;
//存储最终三角化的网络模型
pcl::PolygonMesh triangles;//设置连接点之间的最大距离,(即是三角形最大边长)
gp3.setSearchRadius(200.0f);
//设置各种参数值
gp3.setMu(2.5f);
gp3.setMaximumNearestNeighbors(100);
gp3.setMaximumSurfaceAngle(M_PI_4);
gp3.setMinimumAngle(M_PI / 18);
gp3.setMaximumAngle(2 * M_PI / 3);
gp3.setNormalConsistency(false); //设置搜索方法和输入点云
gp3.setInputCloud(cloud_width_normals);
gp3.setSearchMethod(tree2); //执行重构,结果保存在triangles中
gp3.reconstruct(triangles); //保存网格图
//pcl::io::saveOBJFile("result.obj", triangles);
std::string output_dir = "E:/C/cloud_mesh.ply";
std::string sav = "saved mesh in:";
sav += output_dir;
pcl::console::print_info(sav.c_str());
std::cout << std::endl; pcl::io::savePLYFileBinary(output_dir.c_str(), triangles); // 显示结果图
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("MAP3D MESH"));
////设置背景;
viewer->setBackgroundColor(0, 0, 0);
//设置显示的网格
viewer->addPolygonMesh(triangles, "my");
//viewer->initCameraParameters();
while (!viewer->wasStopped()) {
viewer->spin();
}
std::cout << "success" << std::endl;
return 0;
}
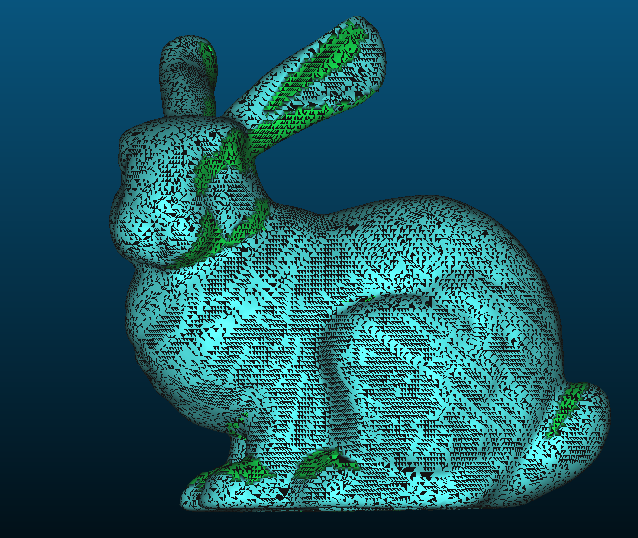
运行结果

说明:
需要处理的数据比较多,因此需要耐心等一会
三角化后的文件保存在 E:/C/cloud_mesh.ply,用compareCloud打开
PCL贪婪投影三角化算法的更多相关文章
- Delaunay三角化算法
参考:<平面域中的Delaunay三角算法>
- 用canvas 实现个图片三角化(LOW POLY)效果
之前无意中看到Ovilia 用threejs做了个LOW POLY,也就是图片平面三角化的效果,觉得很惊艳,然后就自己花了点时间尝试了一下. 我是没怎么用过threejs,所以就直接用canvas的2 ...
- 三角化---深度滤波器---单目稠密重建(高翔slam---十三讲)
一.三角化 [1]三角化得到空间点的三维信息(深度值) (1)三角化的提出 三角化最早由高斯提出,并应用于测量学中.简单来讲就是:在不同的位置观测同一个三维点P(x, y, z),已知在不同位置处观察 ...
- 多视几何——三角化求解3D空间点坐标
VINS-Mono / VINS-Fusion中triangulatePoint()函数通过三角化求解空间点坐标,代码所体现的数学描述不是很直观,查找资料,发现参考文献[1]对这个问题进行详细解释,记 ...
- FPGA加三移位算法:硬件逻辑实现二进制转BCD码
本文设计方式采用明德扬至简设计法.利用FPGA来完成显示功能不是个很理想的方式,当显示任务比较复杂,要通过各种算法显示波形或者特定图形时,当然要用单片机通过C语言完成这类流程控制复杂,又对时序要求不高 ...
- 三目算法、if/else,switch/case运用
//输入学生的成绩,判断考试是否及格,及格6大于等于0 //第一种写法:三目运算 大多用于单独判断是否满足某个条件 import java.util.Scanner; public class Hel ...
- [CGAL]带岛多边形三角化
CGAL带岛多边形三角化,并输出(*.ply)格式的模型 模型输出的关键是节点和索引 #include <CGAL/Triangulation_vertex_base_with_id_2.h&g ...
- K:找寻数组中第n大的数组元素的三个算法
相关介绍: 给定一个数组,找出该数组中第n大的元素的值.其中,1<=n<=length.例如,给定一个数组A={2,3,6,5,7,9,8,1,4},当n=1时,返回9.解决该问题的算法 ...
- Schur 三角化定理的推论
将学习到什么 从 Schur 的酉三角化定理可以收获一批结果,在这一部分介绍重要的几个. 迹与行列式 相似矩阵具有相同的特征多项式, 从特征多项式一节中, 我们又知道,相似矩阵的迹以及行列式都是相 ...
随机推荐
- Vue 路由守卫解决页面退出和弹窗的显示冲突
在使用UI框架提供的弹出层Popup时,如Vant UI的popup,在弹出层显示时,点击物理按键或者小程序自带的返回时,会直接退出页面,这明显不符合页面逻辑. 解决思路: 在弹出层显示时,点击了返回 ...
- 12.基于vue-router的案例
案例分析 用到的路由技术要点: 路由的基础用法 嵌套路由 路由重定向 路由传参 编程式导航 根据项目的整体布局划分好组件结构,通过路由导航控制组件的显示 1.抽离并渲染 App根组件 2.将左侧菜 单 ...
- Java项目使用 Tomcat 部署 Linux 服务器
一.安装 Java 环境 1 下载 jdk 8 yum -y install java-1.8.0-openjdk java-1.8.0-openjdk-devel 设置 centos7 环境变量 v ...
- PostgreSQL 一些比较好用的字符串函数
最近刚接触到PostgreSQL数据库,发现很多功能比较强大的内置函数,特此记录下来.示例下次再补. 1.concat 字符串连接函数 2.concat_ws concat_ws函数连接可自定义分隔符 ...
- 指数基金介绍专栏(4):上证50AH优选指数
作者:牛大 | 公众号:定投五分钟 大家好,我是牛大.每天五分钟,投资你自己:坚持基金定投,终会财富自由! 想必大家会有疑问,什么是上证50AH优选指数?今天老师给大家答疑解惑,详细介绍一下上证50A ...
- laravel使用手札——使用PHPStorm提升开发速度
laravel使用手札——使用PHPStorm提升开发速度 phpstormphplaravel 阅读约 4 分钟 PHPStorm安装 PHPStorm 使用手札——安装看这里 代码自动提示支持 ...
- 2019.12.10 switch(){ case: }
if 适合判断范围 switch 适合判断某个值 两种方法: import java.util.Scanner; class Demo02 { public static void main(Stri ...
- jQuery - 添加元素append/prepend和after/before的区别
append <p> <span class="s1">s1</span> </p> <script> $(" ...
- CSS行内元素
一.典型代表 span a ,strong em del, ins 二.特点: 在一行上显示 不能直接设置宽高 元素的宽和高就是内容撑开的宽高. <style type="text/c ...
- C# VS 调试 动态加载的 DLL
原文:https://www.cnblogs.com/DasonKwok/p/10510218.html 在这篇文章的底部,有提供示例的Demo,可以参考一下哦,拿来直接就可以运行. 说明: 编译类库 ...