ARM 的Thumb状态测试
作为一个使用ARM的学习者,有必要全面了解你的处理器内核。尽管有些内容可能在实际应用中用不到,但是“了解”还是很必要的。Thumb状态,是ARM的一个特色,但是你知道Thumb状态与ARM状态最大的区别是什么,ARM公司设计Thumb状态的初衷是什么?
带着这些问题,我就Thumb状态写了一个简单的程序以作测试。测试平台是ADS1.2,先贴上测试代码。
GET 2440addr.inc
AREA Init,CODE,READONLY
CODE32 ENTRY
EXPORT __ENTRY
__ENTRY
b ResetHandler
b HandlerUndef ;handler for Undefined mode
b HandlerSWI ;handler for SWI interrupt
b HandlerPabort ;handler for PAbort
b HandlerDabort ;handler for DAbort
b . ;reserved
b HandlerIRQ ;handler for IRQ interrupt
b HandlerFIQ ;handler for FIQ interrupt
HandlerFIQ
b .
HandlerIRQ
b .
HandlerUndef
b .
HandlerSWI
b .
HandlerDabort
b .
HandlerPabort
b .
ResetHandler
ldr r0,=WTCON ;watch dog disable
ldr r1,=0x0
str r1,[r0]
mov r1,#0x34000000
ldr r0,=ThumbState+1
bx r0
CODE16
ThumbState
add r0,r0,r1
ldr r0,=HandlerFIQ
ldr r0,[r0]
ldr r0,=BackARM
bx r0
CODE32
ALIGN
BackARM
ldr r0,=GPFCON
ldr r1,=0x55aa
str r1,[r0]
ldr r0,=GPFDAT
ldr r1,=0x0
str r1,[r0] ;
b .
END
我们在看一下反汇编代码。
__ENTRY [0xea00000c] b ResetHandler
00000004 [0xea000007] b HandlerUndef
00000008 [0xea000007] b HandlerSWI
0000000c [0xea000008] b HandlerPabort
00000010 [0xea000006] b HandlerDabort
00000014 [0xeafffffe] b 0x14 ; (__ENTRY + 0x14)
00000018 [0xea000001] b HandlerIRQ
0000001c [0xeaffffff] b HandlerFIQ
HandlerFIQ [0xeafffffe] b HandlerFIQ
HandlerIRQ [0xeafffffe] b HandlerIRQ
HandlerUndef [0xeafffffe] b HandlerUndef
HandlerSWI [0xeafffffe] b HandlerSWI
HandlerDabort [0xeafffffe] b HandlerDabort
HandlerPabort [0xeafffffe] b HandlerPabort
ResetHandler [0xe3a00453] mov r0,#0x53000000
0000003c [0xe3a01000] mov r1,#0
00000040 [0xe5801000] str r1,[r0,#0]
00000044 [0xe3a015d0] mov r1,#0x34000000
00000048 [0xe59f0028] ldr r0,0x00000078 ; = #0x00000051
0000004c [0xe12fff10] bx r0
ThumbState [0x1840] add r0,r0,r1
00000052 [0x480a] ldr r0,0x0000007c ; = #0x00000020
00000054 [0x6800] ldr r0,[r0,#0]
00000056 [0x480a] ldr r0,0x00000080 ; = #0x0000005c
00000058 [0x4700] bx r0
0000005a [0x0000] dcw 0x000 (说明:为了使下边的CODE32代码4字节对齐起到占位作用)
BackARM [0xe59f0020] ldr r0,0x00000084 ; = #0x56000050
00000060 [0xe59f1020] ldr r1,0x00000088 ; = #0x000055aa
00000064 [0xe5801000] str r1,[r0,#0]
00000068 [0xe59f001c] ldr r0,0x0000008c ; = #0x56000054
0000006c [0xe3a01000] mov r1,#0
00000070 [0xe5801000] str r1,[r0,#0]
00000074 [0xeafffffe] b 0x74 ; (BackARM + 0x18)
从反汇编代码中,我们可以看出Thumb状态的指令变为2个字节,所以指令代码密度更高。
下边,我再贴出用AXD调试过程中的现象。
mov r1,#0x34000000 ;运行后r1=0x34000000
ldr r0,=ThumbState+1 ;运行后 r0=x00000051
bx r0 ;跳转到Thumbstate位置处执行,并且切换处理器到Thumb状态
CODE16
ThumbState ;pc = x00000050
add r0,r0,r1 ;运行后r0=0x34000051
ldr r0,=HandlerFIQ ;运行后r0=0x0x00000020
ldr r0,[r0] ;运行后r0=0xeafffffe
ldr r0,=BackARM
bx r0
分析结果,"add r0,r0,r1;运行后r0=0x34000051"说明加法运算是32位的,也就是说CPU在Thumb状态还是32位的,还能说明寄存器也是32位的,并非16位的。"ldr r0,[r0] ;运行后r0=0xeafffffe"也说明了寄存器仍然与ARM状态一样是32位的。
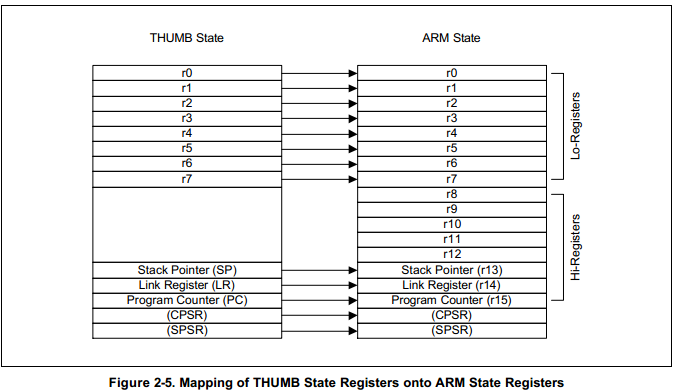
结论:虽然,ARM的Thumb状态的指令是16位的,但是CPU还是32位的,而且寄存器也是32位的。所以,Thumb状态最大的区别就是指令变成16位的,寄存器少了一点,其他没什么变化。
附上ARM的Thumb状态与ARM状态寄存器的对应关系图
懂得的越多,越是无知
ARM 的Thumb状态测试的更多相关文章
- ARM处理器的寄存器,ARM与Thumb状态,7中运行模式
** ARM处理器的寄存器,ARM与Thumb状态,7中运行模式 分类: 嵌入式 ARM处理器工作模式一共有 7 种 : USR 模式 正常用户模式,程序正常执行模式 FIQ模式(Fast ...
- ARM处理器的寄存器,ARM与Thumb状态,7中运行模式 【转】
转自:http://blog.chinaunix.net/uid-28458801-id-3494646.html ARM处理器工作模式一共有 7 种 : USR 模式 正常用户模式,程序正常 ...
- ARM状态和THUMB状态
ARM处理器的工作状态 在ARM的体系结构中,可以工作在三种不同的状态,一是ARM状态,二是Thumb状态及Thumb-2状态,三是调试状态. <嵌入式系统开发与应用教程(第2版)>上介绍 ...
- arm汇编学习(六)---跳转到thumb状态
通常函数返回使用 pop {r7,pc}或bx lr等方式(bx,b类似jmp为跳转指令,但bx可以指定跳转区域究竟为thumb还是arm指令.thumb指令指令的时候,直接填写该地址却总是产生SIG ...
- ARM ® and Thumb ®-2 指令系统
指令表关键词 Rm {, <opsh>} 寄存器移位方式,将寄存器的移位结果作为操作数而Rm值保持不变 <Operand2> 灵活的使用第二个操作数. ...
- 对于Android NDK编译器ARM和Thumb模式的理解
编译NDK项目时,编译器无法识别arm汇编,设置LOCAL_ARM_MODE := arm后问题解决, NDK文档上对LOCAL_ARM_MODE的说明如下: LOCAL_ARM_MODE By de ...
- LinuxShell脚本编程基础5--数值,字符串,文件状态测试,((..))和[[..]]的使用
1.数值比较 ! /bin/bash echo "enter a score:" read num1 ] then echo "Very Good" elif ...
- 监控 HTTP 服务器的状态(测试返回码)shell脚本
#!/bin/bash # 监控 HTTP 服务器的状态(测试返回码) # 设置变量,url为你需要检测的目标网站的网址(IP 或域名),比如百度 url=http://http://183.232. ...
- 036_监控 HTTP 服务器的状态(测试返回码)
#!/bin/bash #设置变量,url 为你需要检测的目标网站的网址(IP 或域名)url=http://192.168.4.5/index.html #定义函数 check_http:#使用 c ...
随机推荐
- Bluetooth 4.0之Android 讲解
Android平台包含了对蓝牙网络协议栈的支持,它允许一个蓝牙设备跟其他的蓝牙设备进行无线的数据交换.应用程序通过Android蓝牙API提供访问蓝牙的功能.这些API会把应用程序无线连接到其他的蓝牙 ...
- 适用于cocos2dx的编辑器:Texture,Tilemap,Particle,Action,Level etc
原文:http://www.cocos2d-x.org/wiki/Editors_for_cocos2d-x_TextureTilemapParticleActionLevel_etc Action ...
- phpcms 源码分析一: common.inc.php
其实就是从网上找到的的逆雪寒的分析, 我下来之后发现格式和错字的问题,非常影响阅读,现在我就是做了下搬运工的角色, 同时将格式调整到可读性提高点而已,让各位看官稍微舒心点: 下面进入整体: < ...
- C#数据类型中的decimal精度比double更高
decimal 128bit大小 有效数字:28~29,虽然decimal类型有比浮点类型更高的精度,但它的范围更小.故double转decimal有可能发生溢出错误,此外,decimal的计算速度稍 ...
- ZBLibrary不能运行的解决方法
ADT运行 右键ZBLibrary Demo > Run as > Android Application 可能出现部分错误,解决方案如下: 右键Project(这里为ZBLibrar ...
- [Form Builder]Oracle Form系统变量中文版总结大全
转:http://yedward.net/?id=57 Form中的系统变量,它存在于一个Form的整个运行时期的会话之中,变量包含了有关Form相关属性的字节信息.有些变量标明了当前状态,还有些变量 ...
- Android 頁面中有 EditText ,進入時取消自動彈出鍵盤
Android 畫面裡的 EditText 被 Focus 時 會自動彈出鍵盤 這是方便使用者習慣的設計 不過筆者在開發時發現 有時候方便過頭了 原因 一開始進入有 EditText 的頁面時 Edi ...
- C# Mutex对象的使用
C# Mutex对象的使用 C#语言有很多值得学习的地方,这里我们主要介绍C# Mutex对象,包括介绍控制好多个线程相互之间的联系等方面. 如何控制好多个线程相互之间的联系,不产生冲突和重复,这需要 ...
- php中怎么实现后台执行?
http://www.cnblogs.com/zdz8207/p/3765567.html php中实现后台执行的方法: ignore_user_abort(true); // 后台运行set_tim ...
- UIKit各类概述
1.UIAcceleration: 被叫做加速事件的一个UIAcceleration类的实例是用来代表即时的三维加速数据.为了接收重力加速度,要注册一个应用应用程序作为一个共享UIAccelerate ...