树莓派4B-细分驱动步进电机
树莓派4B-细分驱动步进电机
项目介绍
利用4B树莓派控制步进电机转动,精度可达:0.0144度 (即360度/25000)
适用于非常精密的角度转动。
舵机的精度为1度,无法实现超高精度控制。
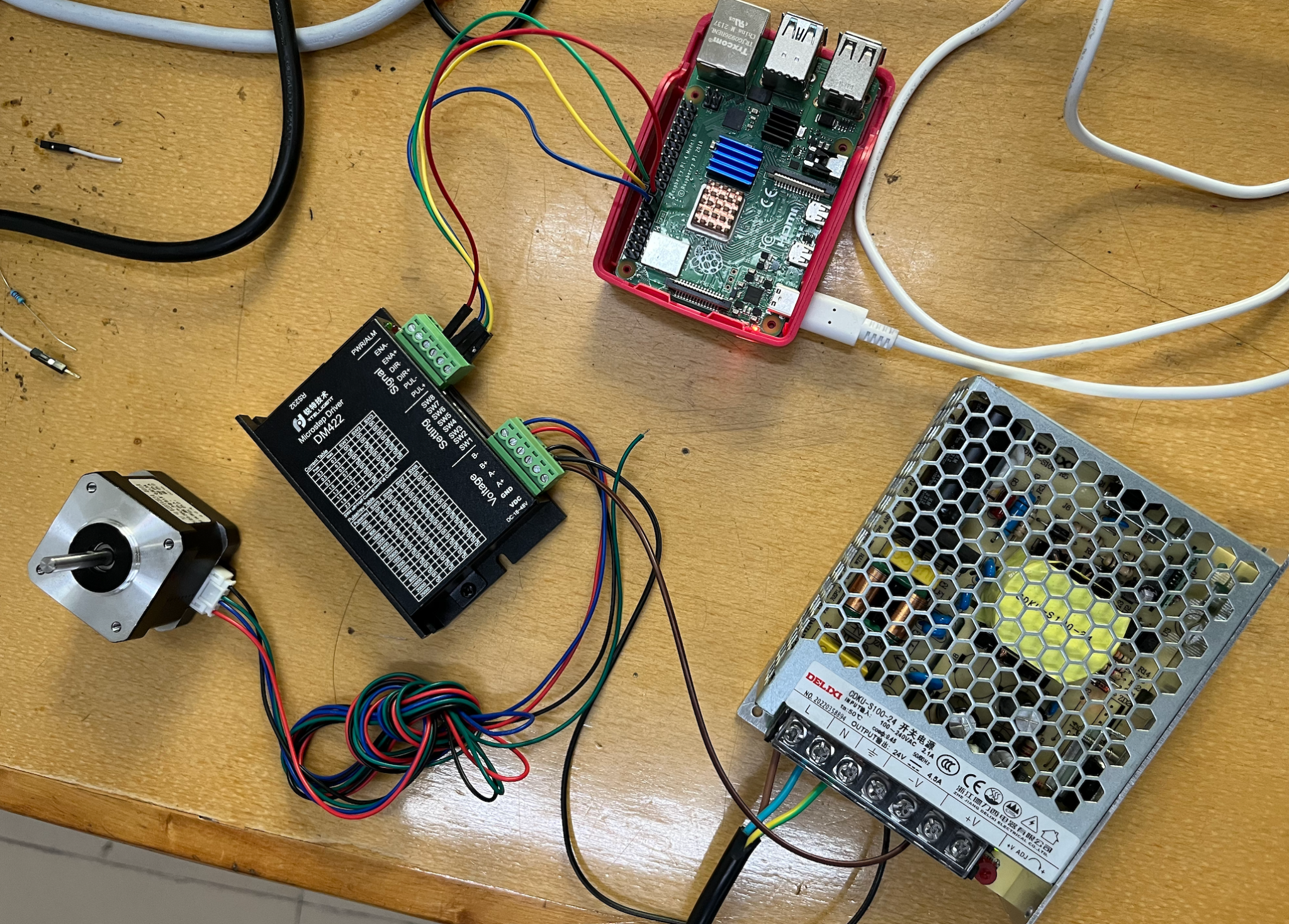
硬件需求
硬件型号不同,只要功能相同,代码即可兼用。
- 树莓派
- CDKU- S100-24开关电源
- DM542驱动器
- 42bygh34步进电机
- 220V插头
硬件介绍
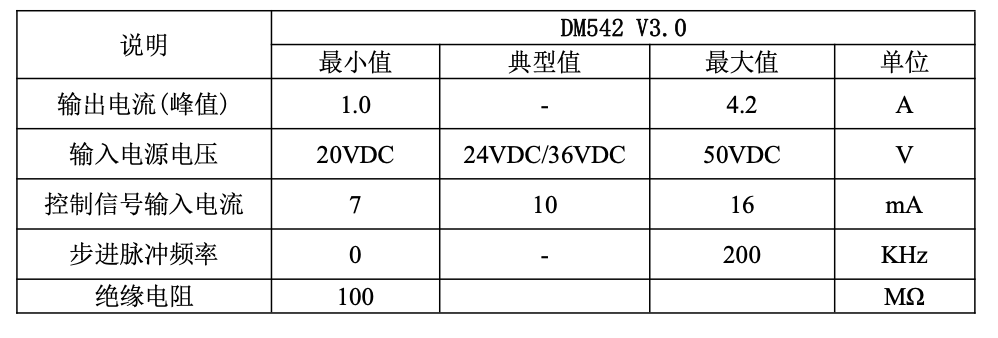
DM542驱动器

概述:
用户使用该驱动器可以设置常用的 8 档电流以及 16 档细分,能够满足大多数场合的应用需要。低中高速运 行都很平稳,噪音小。多种功能可通过外部拨码选择,极大地方便了客户的应用。
应用领域:
适合各种中小型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图
仪、数控机床、自动装配设备等。
电气指标:
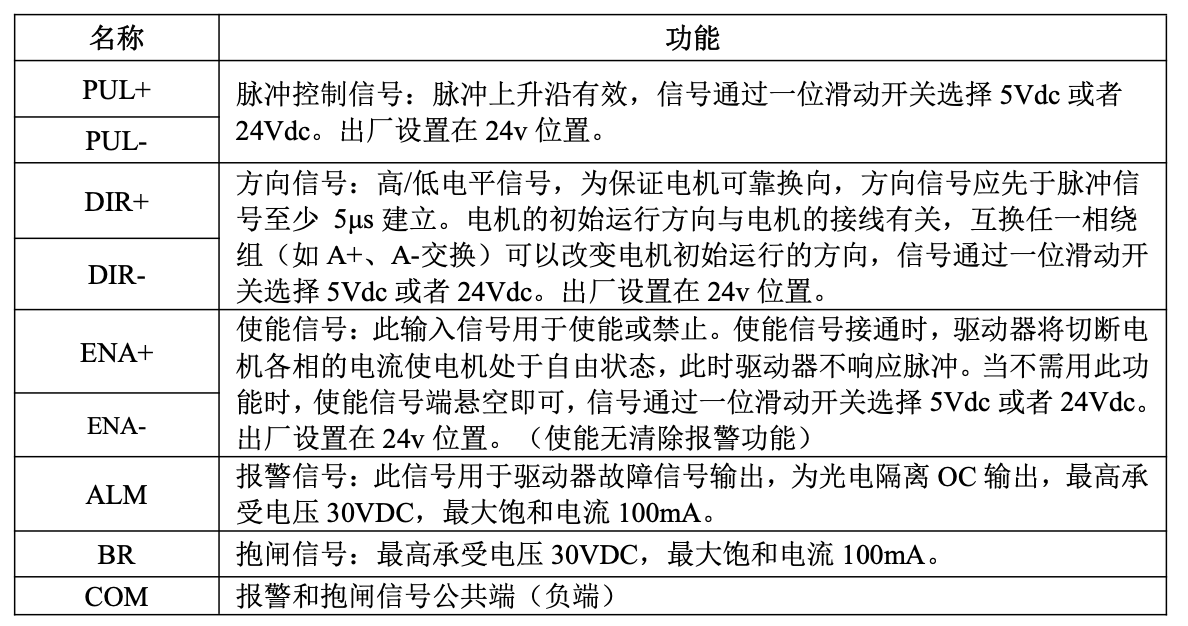
控制信号接口:
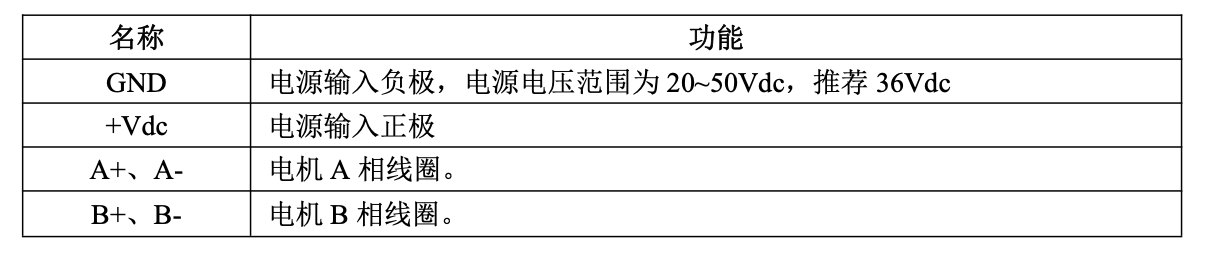
强电接口:
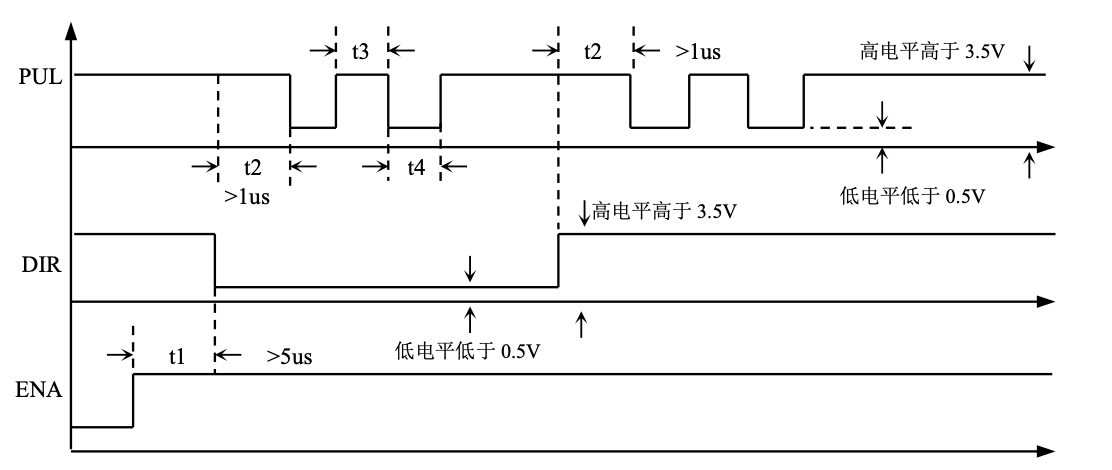
控制信号时序图:

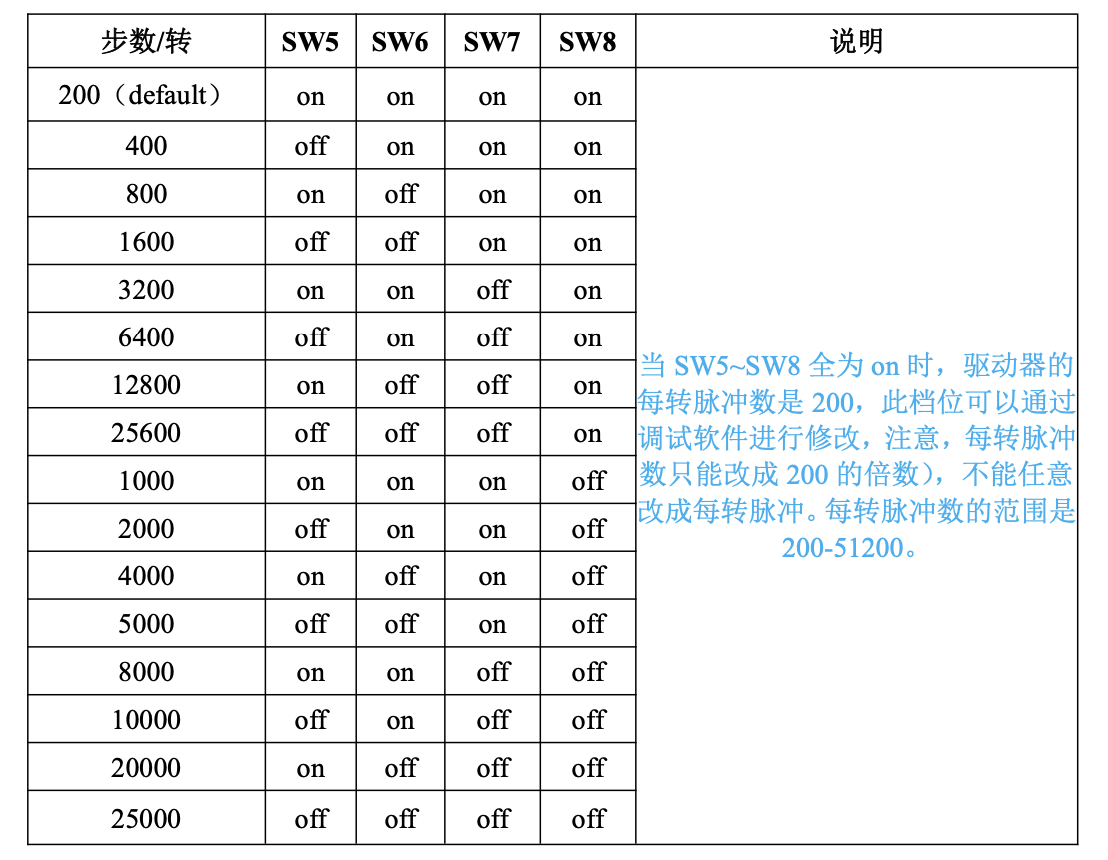
每转脉冲设定:
工作电流设定:

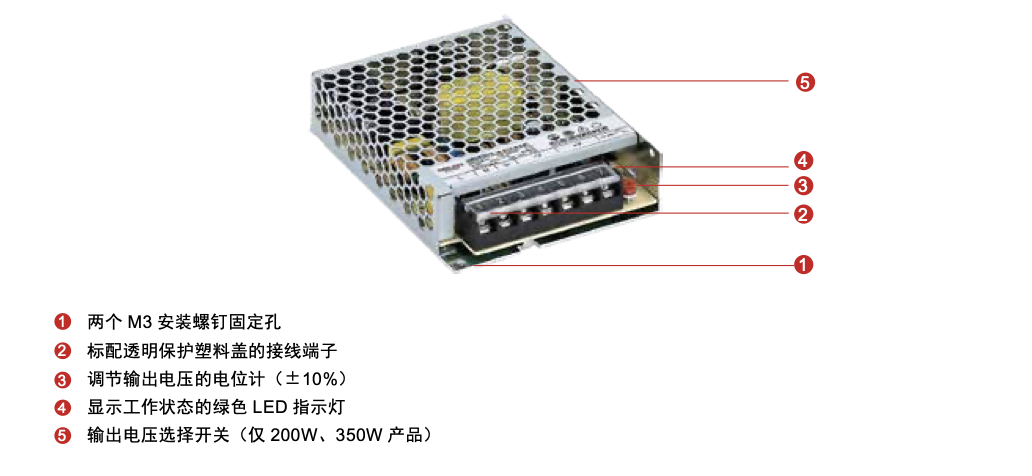
开关电源
采用 90-264VAC 全范围输入电压,(200W、350W 有拨动开关选择)。可任选一组 5V、12V、24V、36V、48V 单组输出
步进电机

电气指标:

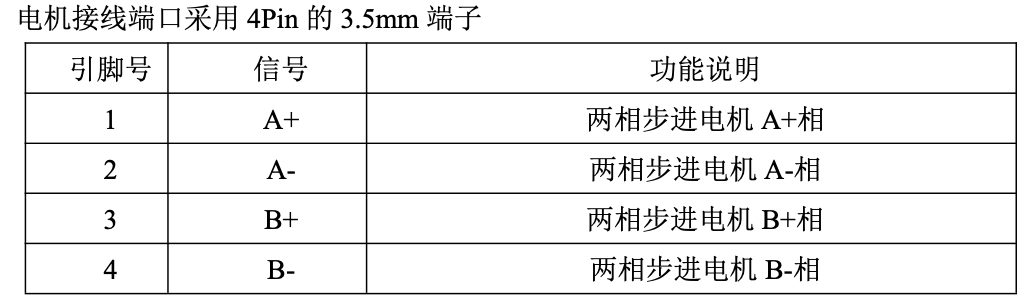
电机接口:
控制信号时序图:
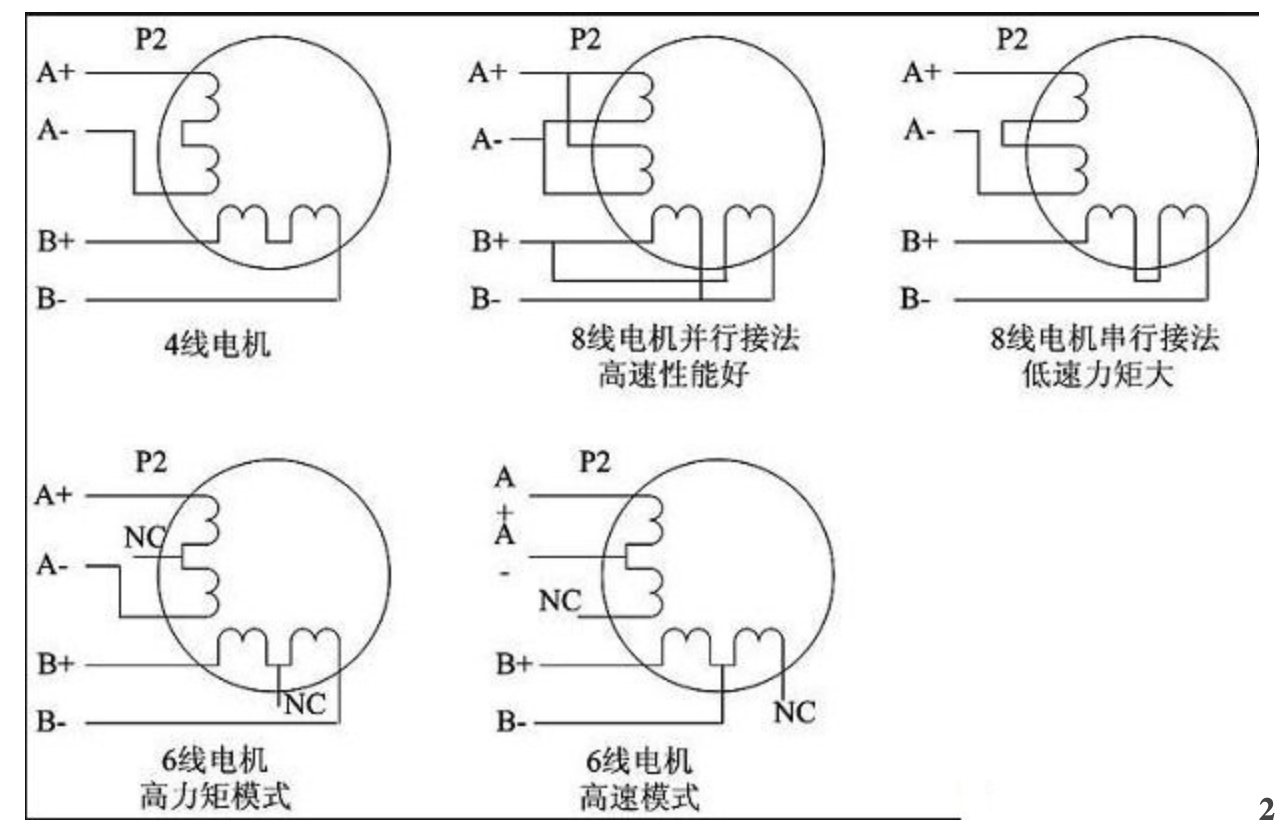
接线方法
共阳极接法
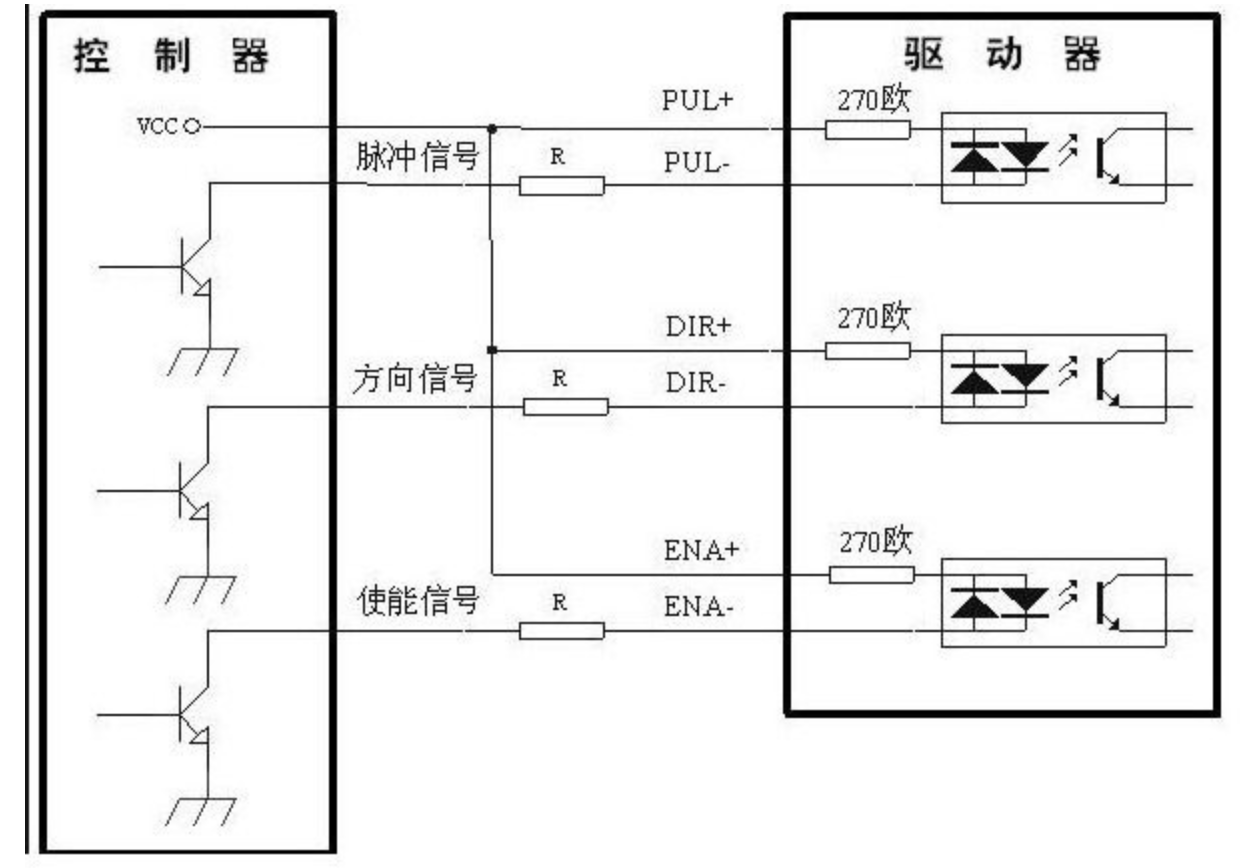
共阴极接法

差分方式接法
接线方式
树莓派GPIO接口和驱动器的接线方式:
IN1 = 18 # 接PUL-
IN2 = 16 # 接PUL+
IN3 = 15 # 接DIR-
IN4 = 13 # 接DIR+
步进电机和驱动器的接线方式:
按照步进电机上的A+、A-等连到驱动器对应位置即可(驱动器上有电机接口标签)
开关电源和220V插头接线方式:
220V插头接开关电源的220V输入电压位置,开关电源的V-和V+接驱动器的输入电源位置
驱动器细分按键调节:
SW1、SW2、SW3、SW6开关设置为on
代码展示:
import RPi.GPIO as GPIO
import time
# 规定GPIO引脚
IN1 = 18 # 接PUL-
IN2 = 16 # 接PUL+
IN3 = 15 # 接DIR-
IN4 = 13 # 接DIR+
def setStep(w1, w2, w3, w4):
GPIO.output(IN1, w1)
GPIO.output(IN2, w2)
GPIO.output(IN3, w3)
GPIO.output(IN4, w4)
def stop():
setStep(0, 0, 0, 0)
def backward(delay, steps):
for i in range(0, steps):
setStep(1, 0, 0, 0)
time.sleep(delay)
setStep(0, 1, 0, 0)
time.sleep(delay)
setStep(0, 0, 1, 0)
time.sleep(delay)
setStep(0, 0, 0, 1)
time.sleep(delay)
def setup():
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(IN1, GPIO.OUT) # Set pin's mode is output
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
def loop(angle):
print ("backward...")
backward(0.0001, int(angle/0.036)) # 发射脉冲时间间隔0.0001(单位秒) 脉冲个数angle/0.036
print ("stop...")
stop() # stop
time.sleep(1) # sleep 3s
def destroy():
GPIO.cleanup() # 释放数据
if __name__ == '__main__': # Program start from here
setup()
while True:
try:
a = input("please input angle:")
loop(float(a))
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child function destroy() will be executed.
destroy()
此代码的精度为:0.036度
如果希望精度更高,自行调整代码和驱动器细分按键。
结果展示
最后,祝大家学习进步,工作顺心!
树莓派4B-细分驱动步进电机的更多相关文章
- python代码实现树莓派3b+驱动步进电机
python代码实现树莓派3b+驱动步进电机 之前买了个树莓派,刚买回来那会儿热情高涨,折腾了一段时间,然后就放那吃灰了.前几天忽然想起来这个东西了,决定再玩玩儿,于是就从某宝上购买了一套步进电机.驱 ...
- Linux学习 - 树莓派4b的U-Boot的初识
Linux学习 - 树莓派4b的U-Boot的初识 初识U-Boot 学习书籍:<[正点原子]I.MX6U嵌入式Linux驱动开发指南V1.5.1> 章节:第三十章 学习内容: 书中介绍u ...
- FPGA驱动步进电机
步进电机 步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛.在非超载的情况下,电机的转速.停止的位置只取决于脉冲信号的频率和脉冲数,而不受 ...
- 树莓派4B安装64位Linux(不用显示器键盘鼠标)
入手了树莓派4B,我对它的定位是作为一个Docker实验环境,平时用到的镜像多为Java服务端常用的技术.以及自己作的Java应用镜像,因此宿主机需要64位操作系统,而树莓派官方操作系统只有32位的, ...
- 树莓派4B 安装CentOS
刚入手了一个树莓派4B替换掉旧的3B搭Nas.吐槽下3B的网卡和USB速度真的太慢. 虽然官方推荐的是Debina,由于习惯了CentOS不想增加学习成本,我还是决定用CentOS. 镜像下载地址:h ...
- 树莓派4B安装docker-compose(64位Linux)
准备工作 树莓派4B已装好64位Linux,并且装好了19.03.1版本的Docker,具体的安装步骤请参考<树莓派4B安装64位Linux(不用显示器键盘鼠标)> 安装docker-co ...
- 树莓派(4B)Linux + .Net Core嵌入式-初始化环境(一)
一.树莓派简单介绍 二.软&件准备 硬件:树莓派4B主机.电源线.TF卡&TF读卡器.PC 软件:win32diskimager(用于烧系统到TF卡).Xshell或Windows T ...
- 树莓派(4B)Linux + .Net Core嵌入式-HelloWorld(二)
一.新建.Net Core项目 新建.Net Core3.0的控制台应用,代码如下 namespace Demo { class Program { static void Main(string[] ...
- 读取树莓派4B处理器(CPU)的实时温度
读取树莓派4B处理器(CPU)的实时温度 树莓派发布4B后,性能提升了不少,但是温度也是高的不行,所以最好配置一个小风扇和散热片还是比较好的 俩种办法都可以实现 1.Shell命令读取 打开终端 cd ...
- 树莓派4B到货开箱体验
树莓派4B到货开箱体验 实不相瞒,喜欢这块板已经很久了,但是国内4GB内存的版本始终没货,.....等等等,终于到货了,迅雷不及眼耳之势赶紧下单...购买点亮开发板所需要的物件 顺便看到一个好看的外壳 ...
随机推荐
- Centos 7安装Elasticsearch 7.6
Centos 7安装Elasticsearch 7.6 Elasticsearch与JDK版本对应关系 在安装 Elasticsearch 时,要注意 Elasticsearch 与 JDK 的版本对 ...
- 迁移学习()《Attract, Perturb, and Explore: Learning a Feature Alignment Network for Semi-supervised Domain Adaptation》
论文信息 论文标题:Attract, Perturb, and Explore: Learning a Feature Alignment Network for Semi-supervised Do ...
- 快速重拾 Tmux
Tmux 是一个 Linux (Mac OS也支持)下的终端复用器,相较于 Screen 更为强大,但快捷键和操作逻辑也更复杂,一段时间不用,就很容易忘记相关的命令和快捷键.本文旨在通过一个简单的场景 ...
- YII2.0使用ActiveForm表单
Controller控制器层代码 <?php namespace frontend\controllers; use frontend\models\UserForm; class UserCo ...
- Kubernetes入门实践(环境搭建)
容器技术只是解决了运维部署工作中的一个很小的问题,在现实生产环境中,除了最基本的安装,还会各式各样的需求,比如服务发现.负载均衡.状态监控.健康检查.扩容缩容.应用迁移.高可用等等.这些容器之上的管理 ...
- 【python基础】定时任务框架APScheduler
1. 基础概念 APScheduler是python中较为简洁直观的定时任务框架,提供了基于固定日期.时间间隔.crontab表达式三种任务类型,并且可以持久化任务(如:将定时任务保存到mysql中) ...
- 为HttpClient开启HTTP/2
.Net Core在调用其他服务时,调用通常使用HttpClient,而HttpClient默认使用HTTP/1.1 . 配置 HttpClient 以使用 HTTP/2 h2 连接 自 .NET C ...
- 用tk.mybaits实现指定字段更新
去年年底的因为业务需要需要在使用tk.mybaits框架的系统中实现指定字段的更新,可是tk.mybaits框架本身并不支持这个功能,我翻遍了CSDN和其他相关的技术相关的网站都没有找到相关的解决 ...
- 关于python中的OSError报错问题
Traceback (most recent call last): File "main.py", line 1, in <module> from trai ...
- 2022-08-27:以下go语言代码输出什么?A:[0];B:panic;C:7;D:不清楚。 package main import ( “fmt“ ) func main() { a
2022-08-27:以下go语言代码输出什么?A:[0]:B:panic:C:7:D:不清楚. package main import ( "fmt" ) func main() ...