63.不同路径II
63.不同路径Ⅱ
题目
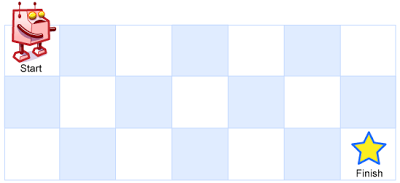
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
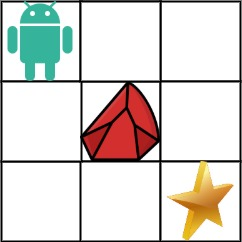
输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
输出:2
解释:
3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
1. 向右 -> 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右 -> 向右
输入:obstacleGrid = [[0,1],[0,0]]
输出:1
m == obstacleGrid.length
n == obstacleGrid[i].length
1 <= m, n <= 100
obstacleGrid[i][j] 为 0 或 1
来源:力扣(LeetCode)
链接:https://leetcode-cn.com/problems/unique-paths-ii
著作权归领扣网络所有。商业转载请联系官方授权,非商业转载请注明出处。
题解
这道题和之前做的62题是非常相似的,只不过多了一个路障。
62题的dp递推式是dp[i][j] = dp[i][j-1] + dp[j-1][i];
这道题依然适用,只不过需要考虑有路障的情况
初始化时,有路障obstacleGrid[i][j]==1的地方dp[i][j]=0,表示没办法达到
还需要考虑的就是i=0或者j=0时,路上有路障的话,那么是没办法到达终点的。处理办法有两种
1.dp[i][j] = dp[i][j-1]或者dp[i][j] = dp[i-1][j]
2.当obstacleGrid[i][j]==0时,dp[i][j]初始化为1
我选择第一种做法
代码
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int m= obstacleGrid.length;
int n = obstacleGrid[0].length;
int [][] dp = new int[m][n];
for(int i=0;i<m;i++){
for(int j=0;j<n;j++){
if(obstacleGrid[i][j]==1){
dp[i][j]=0;
}else if(i==0&&j==0){
dp[0][0] =1;
}else if(i==0){
dp[i][j] = dp[i][j-1];
}else if(j==0){
dp[i][j] = dp[i-1][j];
}else{
dp[i][j] = dp[i-1][j]+dp[i][j-1];
}
}
}
return dp[m-1][n-1];
}
}
63.不同路径II的更多相关文章
- Leetcode之动态规划(DP)专题-63. 不同路径 II(Unique Paths II)
Leetcode之动态规划(DP)专题-63. 不同路径 II(Unique Paths II) 初级题目:Leetcode之动态规划(DP)专题-62. 不同路径(Unique Paths) 一个机 ...
- Java实现 LeetCode 63 不同路径 II(二)
63. 不同路径 II 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为"Start" ). 机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在 ...
- 刷题-力扣-63. 不同路径 II
63. 不同路径 II 题目链接 来源:力扣(LeetCode) 链接:https://leetcode-cn.com/problems/unique-paths-ii/ 著作权归领扣网络所有.商业转 ...
- [LeetCode] 63. 不同路径 II ☆☆☆(动态规划)
描述 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” ). 机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在下图中标记为“Finish”). 现在 ...
- 63. 不同路径 II leetcode JAVA
题目 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” ). 机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在下图中标记为“Finish”). 现在 ...
- 63. 不同路径 II
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” ). 机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在下图中标记为“Finish”). 现在考虑网 ...
- LeetCode 63. 不同路径 II(Unique Paths II)
题目描述 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” ). 机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在下图中标记为“Finish”). ...
- 63不同路径II
题目: 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” ).机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在下图中标记为“Finish”).现在考 ...
- leetcode 63 不同路径II
二维数组动态规划,还可以采用一维数组进行动态规划. class Solution { public: int uniquePathsWithObstacles(vector<vector< ...
随机推荐
- webshell绕过D盾
PHP常见的代码执行函数: eval() assert() preg_replace() create_function() array_map() call_user_func() call_use ...
- 种类并查集(维护敌人的敌人是朋友)、并行-poj1182-食物链 笔记
题意 输入若干组数据,代表着不同动物在食物链的位置(A,B,C),要求出在输入的过程中有多少组数据会与之前矛盾. 思路(借鉴挑战程序设计竞赛) 这题是学并查集时的题,所以用了并查集. 一开始我想的是, ...
- std::string类详解
之所以抛弃char*的字符串而选用C++标准程序库中的string类,是因为他和前者比较起来,不必 担心内存是否足够.字符串长度等等,而且作为一个类出现,他集成的操作函数足以完成我们大多数情况下(甚至 ...
- ☕【Java技术指南】「序列化系列」深入挖掘FST快速序列化压缩内存的利器的特性和原理
FST的概念和定义 FST序列化全称是Fast Serialization Tool,它是对Java序列化的替换实现.既然前文中提到Java序列化的两点严重不足,在FST中得到了较大的改善,FST的特 ...
- Java实体映射工具MapStruct使用详解
1.序 通常在后端开发中经常不直接返回实体Entity类,经过处理转换返回前端,前端提交过来的对象也需要经过转换Entity实体才做存储:通常使用的BeanUtils.copyProperties方法 ...
- 如何在SimpleNVR用Excel表格将通道配置简单化
进入本世纪的第三个十年,流媒体们"绞尽脑汁",依靠技术不断提升用户的体验感.熟悉SimpleNVR的用户都知道,目前SimpleNVR已实现对接自有流媒体服务器平台,不限制观看人数 ...
- jQuery淡入淡出效果
如果是通过鼠标点击事件来触发动画效果可以使用 $("#button").click(function(){ $("#div").stop().fadeToggl ...
- 自定义实例默认值 axios.create(config)
自定义实例默认值 axios.create(config) 根据指定配置创建一个新的axios,也就就每个新 axios 都有自己的配置 新 axios只是没有取消请求和批量发请求的方法,其它所有语法 ...
- PTA 7-3 Windows消息队列 (25分)
PTA 7-3 Windows消息队列 (25分) 消息队列是Windows系统的基础.对于每个进程,系统维护一个消息队列.如果在进程中有特定事件发生,如点击鼠标.文字改变等,系统将把这个消息加到队列 ...
- spring security 之自定义表单登录源码跟踪
上一节我们跟踪了security的默认登录页的源码,可以参考这里:https://www.cnblogs.com/process-h/p/15522267.html 这节我们来看看如何自定义单表认 ...