Python 实现简单的感知机算法
感知机
随机生成一些点和一条原始直线,然后用感知机算法来生成一条直线进行分类,比较差别
导入包并设定画图尺寸
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
plt.rcParams['figure.figsize'] = (8.0,6.0) # 生成图的大小
随机产生数据
fig = plt.figure() # 产生新画布
figa = plt.gca() # 获取当前画布 # 产生100个点
N = 100
xn = np.random.rand(N,2)
x = np.linspace(0,1) # linspace函数可以生成元素为50的等差数列 # 随机生成一条直线
a = np.random.rand()
b = np.random.rand()
f = lambda x:a*x+b # 线性分割前面产生的点
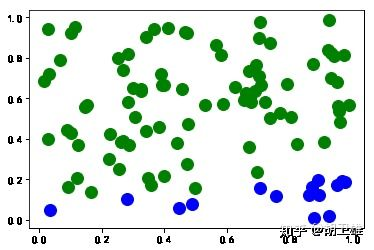
yn = np.zeros([N,1])
for i in range(N):
if(f(xn[i,0])>=xn[i,1]):
yn[i] = 1
plt.plot(xn[i,0],xn[i,1],'bo',markersize=12) # 'bo':用蓝色圆圈标记
if(f(xn[i,0])<xn[i,1]):
yn[i] = -1
plt.plot(xn[i,0],xn[i,1],'go',markersize=12) # 'go':用绿色圆圈标记
超平面的实现
def perceptron(xn,yn,MaxIter=1000,a=0.1,w=np.zeros(3)):
'''
实现一个二维感知机
对于给定的(x,y),感知机将通过迭代寻找最佳的超平面来进行分类
输入:
xn:数据点 N*2 向量
yn:分类结果 N*1 向量
MaxIter:最大迭代次数(可选参数)
a:学习率(可选参数)
w:初始值(可选参数)
输出:
w:超平面参数使得 y=ax+b 最好地分割平面
注意:
由于初始值为随机选取,因此迭代到收敛可能需要一点时间
该函数仅为感知机的简单实现,实际需要考虑更多的内容
'''
N = xn.shape[0]
# 生成超平面
f = lambda x:np.sign(w[0]*1+w[1]*x[0]+w[2]*x[1])
# 反向传播
for _ in range(MaxIter):
i = np.random.randint(N)
if(yn[i]!=f(xn[i,:])):
w[0] = w[0] + yn[i]*a*1
w[1] = w[1] + yn[i]*a*xn[i,0]
w[2] = w[2] + yn[i]*a*xn[i,1]
return w
实际应用
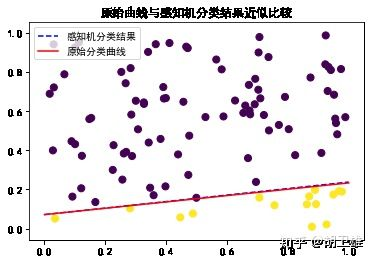
w = perceptron(xn,yn) # 利用权重w,计算 y=ax+b 中的a,b
new_b = -w[0] / w[2]
new_a = -w[1] / w[2]
y = lambda x:new_a*x+new_b # 分割颜色
sep_color = (yn) / 2.0 plt.figure()
figa = plt.gca() plt.scatter(xn[:,0],xn[:,1],c=sep_color.flatten(),s=50) # s:表示点的大小
plt.plot(x,y(x),'b--',label='感知机分类结果')
plt.plot(x,f(x),'r',label='原始分类曲线')
plt.legend()
plt.title('原始曲线与感知机分类结果近似比较')
Text(0.5, 1.0, '原始曲线与感知机分类结果近似比较')
Python 实现简单的感知机算法的更多相关文章
- python 实现简单的感知机
最近在自学机器学习,记录下一些学习记录 如何用python实现一个简单的感知机 需要安装numpy库,即下面用到的np 简单的说就是 通过计算权重向量w和输入向量x的线性组合,判断该线性组合是否大于某 ...
- python 实现简单的KNN算法
from numpy import * import operator def createDataSet(): group = array([[3,104],[2,100],[1,81],[101, ...
- python实现简单关联规则Apriori算法
from itertools import combinations from copy import deepcopy # 导入数据,并剔除支持度计数小于min_support的1项集 def lo ...
- python实现简单分类knn算法
原理:计算当前点(无label,一般为测试集)和其他每个点(有label,一般为训练集)的距离并升序排序,选取k个最小距离的点,根据这k个点对应的类别进行投票,票数最多的类别的即为该点所对应的类别.代 ...
- 使用Python来编写一个简单的感知机
来表示.第二个元素是表示期望输出的值. 这个数组定义例如以下: training_data = [ (array([0,0,1]), 0), (array([0,1,1]), 1), (arra ...
- 教你用Python实现简单监督学习算法
教你用Python实现简单监督学习算法 监督学习作为运用最广泛的机器学习方法,一直以来都是从数据挖掘信息的重要手段.即便是在无监督学习兴起的近日,监督学习也依旧是入门机器学习的钥匙. 这篇监督学习教程 ...
- 机器学习---用python实现感知机算法和口袋算法(Machine Learning PLA Pocket Algorithm Application)
之前在<机器学习---感知机(Machine Learning Perceptron)>一文中介绍了感知机算法的理论知识,现在让我们来实践一下. 有两个数据文件:data1和data2,分 ...
- Python之路,Day21 - 常用算法学习
Python之路,Day21 - 常用算法学习 本节内容 算法定义 时间复杂度 空间复杂度 常用算法实例 1.算法定义 算法(Algorithm)是指解题方案的准确而完整的描述,是一系列解决问题的 ...
- 机器学习算法--Perceptron(感知机)算法
感知机: 假设输入空间是\(\chi\subseteq R^n\),输出空间是\(\gamma =\left( +1,-1\right)\).输入\(\chi\in X\)表示实例的特征向量,对应于输 ...
随机推荐
- 服务器部署之nginx的配置
nginx可作为Web和 反向代理 服务器,在高连接并发的情况下,Nginx是Apache服务器不错的替代品.下面记录一下自己对nginx的配置和使用. nginx的安装 环境:oracle-linu ...
- [Leetcode] Combination Sum 系列
Combination Sum 系列题解 题目来源:https://leetcode.com/problems/combination-sum/description/ Description Giv ...
- kernel随机生成MAC地址的接口
/** * eth_random_addr - Generate software assigned random Ethernet address * @addr: Pointer to a si ...
- MySQL创建相同表和数据命令
创建和表departments结构和数据一样的表departments_t mysql> create table departments_t like departments; Query O ...
- 15个你不得不知道的Chrome dev tools的小技巧
转载自:https://www.imooc.com/article/2559 谷歌浏览器如今是Web开发者们所使用的最流行的网页浏览器.伴随每六个星期一次的发布周期和不断扩大的强大的开发功能,Chro ...
- Machine Learning系列--深入理解拉格朗日乘子法(Lagrange Multiplier) 和KKT条件
在求取有约束条件的优化问题时,拉格朗日乘子法(Lagrange Multiplier) 和KKT条件是非常重要的两个求取方法,对于等式约束的优化问题,可以应用拉格朗日乘子法去求取最优值:如果含有不等式 ...
- 设计模式(一)工厂模式Factory(创建型)(转)
原文链接:http://blog.csdn.net/hguisu/article/details/7505909 设计模式一 工厂模式Factory 在面向对象编程中, 最通常的方法是一个new操作符 ...
- Linux阵列 RAID详解 (转)
原文链接:http://molinux.blog.51cto.com/2536040/516008 一. RAID详解 二. mdadm工具介绍 三. 创建一个RAID的基本过程 四. ...
- php PDO判断连接是否可用的方法
转载自:傲雪星枫 原文地址: http://blog.csdn.net/fdipzone/article/details/53117541 mysql_ping() 检查到服务器的连接是否正常.如果 ...
- js + -操作符
js + 举例说明最有效了... "11"+1='111' "11"+'1'="111" 11+1=12 大概的感觉就是+操作符会优先输入S ...