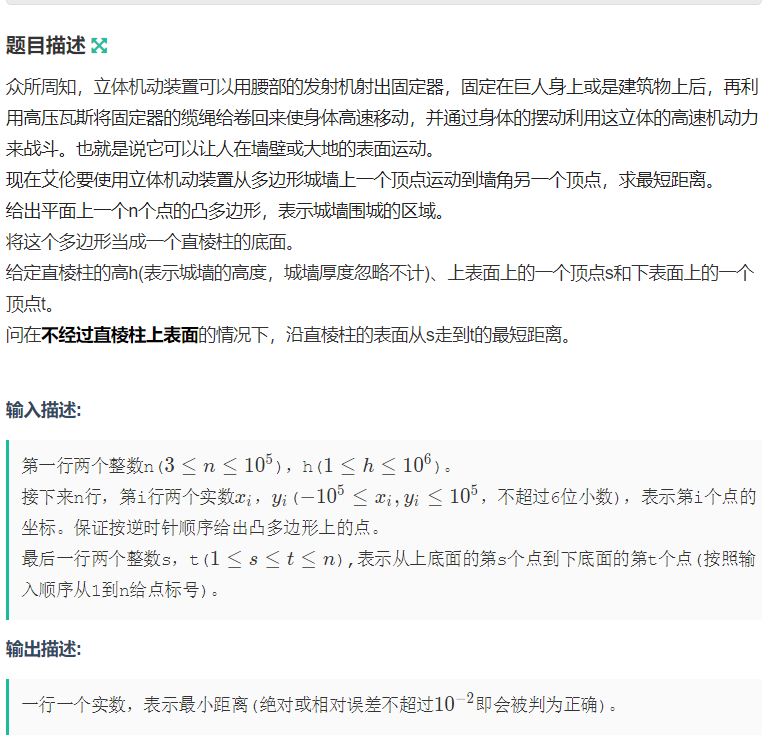
牛客挑战赛33 C 艾伦的立体机动装置(几何)
思路:
我们需要枚举展开多少条边 然后把上底面的点放到和下底面一个平面 然后算两点之间的距离 注意判断直线与线段是否有交点
#include <bits/stdc++.h> using namespace std;
const double eps = 1e-8;
const double inf = 1e20;
const double pi = acos(-1.0);
const int N = 1e5+7;
//Compares a double to zero
int sgn(double x){
if(fabs(x) < eps)return 0;
if(x < 0)return-1;
else return 1;
}
//square of a double
inline double sqr(double x){return x*x;} struct Point{
double x,y;
Point(){}
Point(double _x,double _y){
x = _x;
y = _y;
}
void input(){
scanf("%lf%lf",&x,&y);
}
void output(){
printf("%.2f-%.2f\n",x,y);
}
bool operator == (Point b)const{
return sgn(x-b.x) == 0 && sgn(y-b.y) == 0;
}
bool operator < (Point b)const{
return sgn(x-b.x)== 0-sgn(y-b.y)?0:x<b.x;
}
Point operator-(const Point &b)const{
return Point(x-b.x,y-b.y);
}
//叉积
double operator ^(const Point &b)const{
return x*b.y-y*b.x;
}
//点积
double operator *(const Point &b)const{
return x*b.x + y*b.y;
}
//返回长度
double len(){
return hypot(x,y);//库函数
}
//返回长度的平方
double len2(){
return x*x + y*y;
}
//返回两点的距离
double distance(Point p){
return hypot(x-p.x,y-p.y);
}
Point operator +(const Point &b)const{
return Point(x+b.x,y+b.y);
}
Point operator *(const double &k)const{
return Point(x*k,y*k);
}
Point operator /(const double &k)const{
return Point(x/k,y/k);
}
//计算 pa 和 pb 的夹角
//就是求这个点看 a,b 所成的夹角
//测试 LightOJ1203
double rad(Point a,Point b){
Point p = *this;
return fabs(atan2( fabs((a-p)^(b-p)),(a-p)*(b-p) ));
}
//化为长度为 r 的向量
Point trunc(double r){
double l = len();
if(!sgn(l))return *this;
r /= l;
return Point(x*r,y*r);
}
//逆时针旋转 90 度
Point rotleft(){
return Point(-y,x);
}
//顺时针旋转 90 度
Point rotright(){
return Point(y,-x);
}
//绕着 p 点逆时针旋转 angle
Point rotate(Point p,double angle){
Point v = (*this)-p;
double c = cos(angle), s = sin(angle);
return Point(p.x + v.x*c-v.y*s,p.y + v.x*s + v.y*c);
}
}p[N];
struct Line{
Point s,e;
Line(){}
Line(Point _s,Point _e){
s = _s;
e = _e;
}
bool operator ==(Line v){
return (s == v.s)&&(e == v.e);
}
//根据一个点和倾斜角 angle 确定直线,0<=angle<pi
Line(Point p,double angle){
s = p;
if(sgn(angle-pi/2) == 0){
e = (s + Point(0,1));
}
else{
e = (s + Point(1,tan(angle)));
}
}
//ax+by+c=0
Line(double a,double b,double c){
if(sgn(a) == 0){
s = Point(0,-c/b);
e = Point(1,-c/b);
}
else if(sgn(b) == 0){
s = Point(-c/a,0);
e = Point(-c/a,1);
}
else{
s = Point(0,-c/b);
e = Point(1,(-c-a)/b);
}
}
void input(){
s.input();
e.input();
}
void adjust(){
if(e < s){
swap(s,e);
}
}
//求线段长度
double length(){
return s.distance(e);
}
//返回直线倾斜角 0<=angle<pi
double angle(){
double k = atan2(e.y-s.y,e.x-s.x);
if(sgn(k) < 0)k += pi;
if(sgn(k-pi) == 0)k-= pi;
return k;
}
//点和直线关系
//1 在左侧
//2 在右侧
//3 在直线上
int relation(Point p){
int c = sgn((p-s)^(e-s));
if(c < 0)return 1;
else if(c > 0)return 2;
else return 3;
}
// 点在线段上的判断
bool pointonseg(Point p){
return sgn((p-s)^(e-s)) == 0 && sgn((p-s)*(p-e)) <= 0;
}
//两向量平行 (对应直线平行或重合)
bool parallel(Line v){
return sgn((e-s)^(v.e-v.s)) == 0;
}
//两线段相交判断
//2 规范相交
//1 非规范相交
//0 不相交
int segcrossseg(Line v){
int d1 = sgn((e-s)^(v.s-s));
int d2 = sgn((e-s)^(v.e-s));
int d3 = sgn((v.e-v.s)^(s-v.s));
int d4 = sgn((v.e-v.s)^(e-v.s));
if( (d1^d2)==-2 && (d3^d4)==-2 )return 2;
return (d1==0 && sgn((v.s-s)*(v.s-e))<=0) ||
(d2==0 && sgn((v.e-s)*(v.e-e))<=0) ||
(d3==0 && sgn((s-v.s)*(s-v.e))<=0) ||
(d4==0 && sgn((e-v.s)*(e-v.e))<=0);
}
//直线和线段相交判断
//-*this line -v seg
//2 规范相交
//1 非规范相交
//0 不相交
int linecrossseg(Line v){
int d1 = sgn((e-s)^(v.s-s));
int d2 = sgn((e-s)^(v.e-s));
if((d1^d2)==-2) return 2;
return (d1==0||d2==0);
}
//两直线关系
//0 平行
//1 重合
//2 相交
int linecrossline(Line v){
if((*this).parallel(v))
return v.relation(s)==3;
return 2;
}
//求两直线的交点
//要保证两直线不平行或重合
Point crosspoint(Line v){
double a1 = (v.e-v.s)^(s-v.s);
double a2 = (v.e-v.s)^(e-v.s);
return Point((s.x*a2-e.x*a1)/(a2-a1),(s.y*a2-e.y*a1)/(a2-a1
));
}
//点到直线的距离
double dispointtoline(Point p){
return fabs((p-s)^(e-s))/length();
}
//点到线段的距离
double dispointtoseg(Point p){
if(sgn((p-s)*(e-s))<0 || sgn((p-e)*(s-e))<0)
return min(p.distance(s),p.distance(e));
return dispointtoline(p);
}
//返回线段到线段的距离
//前提是两线段不相交,相交距离就是 0 了
double dissegtoseg(Line v){
return min(min(dispointtoseg(v.s),dispointtoseg(v.e)),min(v
.dispointtoseg(s),v.dispointtoseg(e)));
}
//返回点 p 在直线上的投影
Point lineprog(Point p){
return s + ( ((e-s)*((e-s)*(p-s)))/((e-s).len2()) );
}
//返回点 p 关于直线的对称点
Point symmetrypoint(Point p){
Point q = lineprog(p);
return Point(2*q.x-p.x,2*q.y-p.y);
}
};
double sum[N],ans=1e18;
int s,t;
void work(Point x,Line tmp,int i){
Line res=Line(x,p[t]);
//printf("%lf\n",res.length());
if(res.linecrossseg(tmp)!=0){
ans=min(ans,res.length());
}
}
int main(){
int n,h;
scanf("%d%d",&n,&h);
for(int i=0;i<n;i++){
p[i].input();
}
scanf("%d%d",&s,&t);
--s; --t;
for(int i=1;i<n;i++){
sum[i]=sum[i-1]+p[i-1].distance(p[i]);
}
double tot=sum[n]=sum[n-1]+p[n-1].distance(p[0]);
for(int i=0;i<n;i++){
Point x=p[i],y=p[(i+1)%n];
Point z=(x-y).rotleft();
z=z*(h*1.0/z.len()); Point t=y+z; Line tmp=Line(t,t+z.rotleft());
//printf("%lf\n",tot);
double len;
if(s>=i+1){
len=sum[s]-sum[i+1];
}else{
len=tot-sum[i+1]+sum[s];
}
Point l,r;
l=t+(tmp.e-tmp.s)/tmp.length()*len;
r=t+(tmp.e-tmp.s)/tmp.length()*(len-tot);
// cout<<i<<" "<<r.x<<" "<<r.y<<endl;
work(l,Line(x,y),i);
work(r,Line(x,y),i);
}
printf("%.6lf\n",ans);
}
牛客挑战赛33 C 艾伦的立体机动装置(几何)的更多相关文章
- 牛客挑战赛33 B-鸽天的放鸽序列
也许更好的阅读体验 \(\mathcal{Description}\) 定义一个长为\(n\)的\(01\)序列\(A_1, A_2, \dots, A_n\)的权值为\(\sum_{i=1}^n ...
- 牛客挑战赛33 F 淳平的形态形成场(无向图计数,EGF,多项式求逆)
传送门: 淳平的形态形成场 题解: 把a排序后,直接统计答案恰好为a[i]并不好做,可以统计答案>a[i]的方案数,设为\(f[i]\). 即不存在一个联通块,所有的权值都<=a[i]. ...
- 牛客练习赛33 E tokitsukaze and Similar String (字符串哈希hash)
链接:https://ac.nowcoder.com/acm/contest/308/E 来源:牛客网 tokitsukaze and Similar String 时间限制:C/C++ 2秒,其他语 ...
- 牛客练习赛33 D tokitsukaze and Inverse Number (树状数组求逆序对,结论)
链接:https://ac.nowcoder.com/acm/contest/308/D 来源:牛客网 tokitsukaze and Inverse Number 时间限制:C/C++ 1秒,其他语 ...
- 牛客练习赛33 C tokitsukaze and Number Game (结论+字符串处理)
链接:https://ac.nowcoder.com/acm/contest/308/C 来源:牛客网 tokitsukaze and Number Game 时间限制:C/C++ 1秒,其他语言2秒 ...
- 牛客练习赛33 B tokitsukaze and RPG (类埃筛)
链接:https://ac.nowcoder.com/acm/contest/308/B 来源:牛客网 tokitsukaze and RPG 时间限制:C/C++ 1秒,其他语言2秒 空间限制:C/ ...
- 牛客挑战赛 39 牛牛与序列 隔板法 容斥 dp
LINK:牛牛与序列 (牛客div1的E题怎么这么水... 还没D难. 定义一个序列合法 当且仅当存在一个位置i满足 $a_i>a_,a_j<a_$且对于所有的位置i,$1 \leq a_ ...
- 牛客挑战赛 30 A 小G数数
题目链接:https://ac.nowcoder.com/acm/contest/375/A 分析:我写的时候竟然把它当成了DP....... 还建了个结构体DP数组,保存一二位,不知道当时脑子在抽啥 ...
- 良心送分题(牛客挑战赛35E+虚树+最短路)
目录 题目链接 题意 思路 代码 题目链接 传送门 题意 给你一棵树,然后把这棵树复制\(k\)次,然后再添加\(m\)条边,然后给你起点和终点,问你起点到终点的最短路. 思路 由于将树复制\(k\) ...
随机推荐
- Debian安装HomeBrew
前言 HomeBrew 的用处我想使用 Mac 的开发人员都知道, 本篇讲解如何在 Debian 上安装 BrewLinux 更新: 后来发现并不是很好用, 不建议使用 官方推荐的脚本安装 注意这里只 ...
- LeetCode662 二叉树最大宽度
给定一个二叉树,编写一个函数来获取这个树的最大宽度.树的宽度是所有层中的最大宽度.这个二叉树与满二叉树(full binary tree)结构相同,但一些节点为空. 每一层的宽度被定义为两个端点(该层 ...
- 肌肤管家SkinRun V3S智能皮肤检测仪,用AI探索肌肤问题
继肌肤管家SkinRun V3皮肤检测仪之后,肌肤管家SkinRun近期又一重磅推出的肌肤管家SkinRun V3S 智能肌肤测试仪引起了美业人的广泛关注.据了解它汇集百万皮肤数据,利用五光谱原理和人 ...
- Count PAT's (25) PAT甲级真题
题目分析: 由于本题字符串长度有10^5所以直接暴力是不可取的,猜测最后的算法应该是先预处理一下再走一层循环就能得到答案,所以本题的关键就在于这个预处理的过程,由于本题字符串匹配的内容的固定的PAT, ...
- 二 prometheus 监控 Redis
Prometheus 监控Redis需要用到redis_exporter客户端, Prometheus -> redis_exporter这个模式, 类似监控Mysql 一个思路. 1 ) 设置 ...
- MySQL下载与安装教程
一,下载篇 1,首先访问MySQL官网下载页,https://dev.mysql.com/downloads/mysql/ 如果是MAC系统,操作系统请选择macOS,Windows则选择Window ...
- three.js cannon.js物理引擎地形生成器和使用指针锁定控件
今天郭先生说一说使用cannon.js物理引擎绘制地形和使用指针锁定控件.效果如下图.线案例请点击博客原文. 这里面的生成地形的插件和指针锁定控件也是cannon.js的作者schteppe封装的,当 ...
- JS实现鼠标移入DIV随机变换颜色
今天分享一个在 JavaScript中,实现一个鼠标移入可以随机变换颜色,本质就是js的随机数运用. 代码如下: <!DOCTYPE html> <html> <head ...
- Flink的状态与容错
本文主要运行到Flink以下内容 检查点机制(CheckPoint) 状态管理器(StateBackend) 状态周期(StateTtlConfig) 关系 首先要将state和checkpoint概 ...
- Flink可靠性的基石-checkpoint机制详细解析
Checkpoint介绍 checkpoint机制是Flink可靠性的基石,可以保证Flink集群在某个算子因为某些原因(如 异常退出)出现故障时,能够将整个应用流图的状态恢复到故障之前的某一状态,保 ...