Sobel边缘检测算法(转载)
转载请注明出处: http://blog.csdn.net/tianhai110
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量
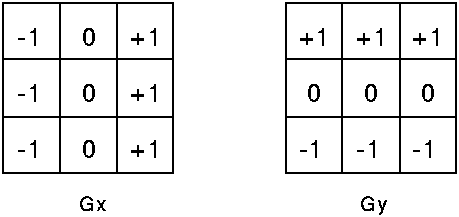
Sobel卷积因子为:
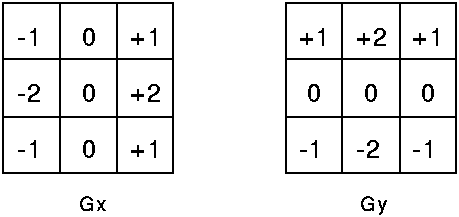
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
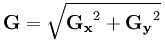
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
通常,为了提高效率 使用不开平方的近似值:
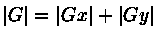
如果梯度G大于某一阀值 则认为该点(x,y)为边缘点。
然后可用以下公式计算梯度方向:
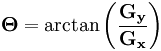
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
附带知识:
普利维特算子(Prewitt operate):
除sobel边缘检测外 还有Prewitt算子, 它的卷积因子如下:
其他计算 和sobel差不多;
Prewitt算子利用像素点上下、左右邻点灰度差,在边缘处达到极值检测边缘。对噪声具有平滑作用,定位精度不够高。
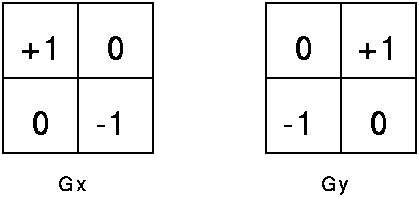
罗伯茨交叉边缘检测(Roberts Cross operator)
卷积因子如下:
灰度公式为:
近似公式为:
具体计算如下:
G(x,y)=abs(f(x,y)-f(x+1,y+1))+abs(f(x,y+1)-f(x+1,y))
灰度方向 计算公式为:

Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感
其他边缘检测技术:
参考文章:
http://homepages.inf.ed.ac.uk/rbf/HIPR2/featops.htm
http://homepages.inf.ed.ac.uk/rbf/HIPR2/sobel.htm
Sobel边缘检测算法(转载)的更多相关文章
- 基于MATLAB的Sobel边缘检测算法实现
图像边缘就是图像灰度值突变的地方,也就是图像在该部分的像素值变化速度非常之快,就比如在坐标轴上一条曲线有刚开始的平滑突然来个大转弯,在变化出的导数非常大. Sobel算子主要用作边缘检测,它是一离散型 ...
- Sobel边缘检测算法
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值.在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量 Sobe ...
- 基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 【转】基于FPGA的Sobel边缘检测的实现
前面我们实现了使用PC端上位机串口发送图像数据到VGA显示,通过MATLAB处理的图像数据直接是灰度图像,后面我们在此基础上修改,从而实现,基于FPGA的动态图片的Sobel边缘检测.中值滤波.Can ...
- 基于Vivado HLS在zedboard中的Sobel滤波算法实现
基于Vivado HLS在zedboard中的Sobel滤波算法实现 平台:zedboard + Webcam 工具:g++4.6 + VIVADO HLS + XILINX EDK + ...
- 【算法随记】Canny边缘检测算法实现和优化分析。
以前的博文大部分都写的非常详细,有很多分析过程,不过写起来确实很累人,一般一篇好的文章要整理个三四天,但是,时间越来越紧张,后续的一些算法可能就以随记的方式,把实现过程的一些比较容易出错和有价值的细节 ...
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- <<一种基于δ函数的图象边缘检测算法>>一文算法的实现。
原始论文下载: 一种基于δ函数的图象边缘检测算法. 这篇论文读起来感觉不像现在的很多论文,废话一大堆,而是直入主题,反倒使人觉得文章的前后跳跃有点大,不过算法的原理已经讲的清晰了. 一.原理 ...
- 图像特征提取:Sobel边缘检测
前言 点和线是做图像分析时两个最重要的特征,而线条往往反映了物体的轮廓,对图像中边缘线的检测是图像分割与特征提取的基础.文章主要讨论两个实际工程中常用的边缘检测算法:Sobel边缘检测和Canny边缘 ...
随机推荐
- 开始→运行(cmd)命令大全
gpedit.msc-----组策略 sndrec32-------录音机 Nslookup-------IP地址侦测器 explorer-------打开资源管理器 logoff---------注 ...
- C# DES加密
需要引用名称空间 using System; using System.Text; using System.Security.Cryptography; using System.IO; 具体代码: ...
- ubuntu连接Android调试
从这周开始尝试Android开发,记下点滴. 安装JDK.下载ADT不说,连接手机调试的时候出错,一堆问号??????????.网上一查,属于典型错误.试下来,有几步比较关键,容易忽视: 1.我机器上 ...
- This absolute uri http://java.sun.com/jsp/jstl/core cannot be resolved in either web.xml or the jar files deployed with this application
部署生产环境出现以上错误,原因是jsp页面中使用了jstl的标签,但没有导入相应的jar包.因为开发环境 myeclipse10 自带类库已经集成 解决方法 ①将jstl.jar和standard.j ...
- java---数据格式的验证
package cc.cococ.trade.util; import java.util.regex.Matcher; import java.util.regex.Pattern; public ...
- 【转发】Linux下如何查看当前支持的文件系统及各分区的文件系统类型
Linux下查看当前内核系统支持的文件系统: 一般都在 /lib/modules/kernl-version/kernel/fs/ 目录下包含了当前内核版本支持的文件系统: ls /lib/modul ...
- [windows驱动]windows8.1驱动调试前戏
人们都说在干正事之前,得先做足前戏才会爽,我一直很认同这个观点,下面我来总结下进行windows8.1的WDK调试所要做的准备工作. 软件安装: 1.VS2013. 2.WDK8.1 3.Window ...
- 登陆中session的处理
在学校中的登陆注册使用的普通session存储信息,然后就是根据session中获取user是否拥有来判断是否登陆. 在一次面试中别人问到了我你们项目的登陆session是怎么一个情况,我这样答的话那 ...
- webview调用外部浏览器而不是在控件中显示
view.loadUrl(url); // 如果页面中链接,如果希望点击链接继续在当前browser中响应, // 而不是新开Android的系统browser ...
- 2013年8月份第2周51Aspx源码发布详情
上班族网站(毕设)源码 2013-8-16 [VS2010]源码描述:自己做的毕业设计,上班族网站项目是专门针对上班族群体设计和开发的网站项目.该网站主要涵盖了论坛平台,笑话模块,名言模块,资讯模块 ...