(stm32f103学习总结)—输入捕获模式
一、输入捕获介绍
二、输入捕获配置步骤
(1)使能定时器及端口时钟,并设置引脚复用器映射和引脚模式等
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD;
(2)初始化定时器参数,包含自动重装值,分频系数,计数方式等
TIM_TimeBaseInit(TIM_TypeDef*TIMx,TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
(3)设置通用定时器的输入捕获参数,开启输入捕获功能
TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);
(4)开启捕获和定时器溢出(更新)中断
TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState)
(5)设置定时器中断优先级,使能定时器中断通道 NVIC初始化库函数是
NVIC_Init()
(6)使能定时器
TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState);
(7)编写定时器中断服务函数
void TIM5_IRQHandle()
三、代码举例
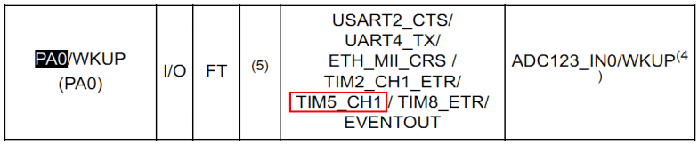
所要实现的功能是:使用TIM5的CH1检测输入信号高电平脉宽, 将检测的高电平脉宽时间通过printf函数打印出来,同时让D1指示灯不 断闪烁表示系统正常运行。(使用普中stm32f103开发板)
1 #ifndef _input_H
2 #define _input_H
3
4 #include "system.h"
5
6 extern u8 TIM5_CH1_CAPTURE_STA; //输入捕获的状态
7 extern u16 TIM5_CH1_CAPTURE_VAL;//输入捕获值
8
9
10 void TIM5_CH1_Input_Init(u16 arr,u16 psc);
11
12 #endif
(原子开发板资料)
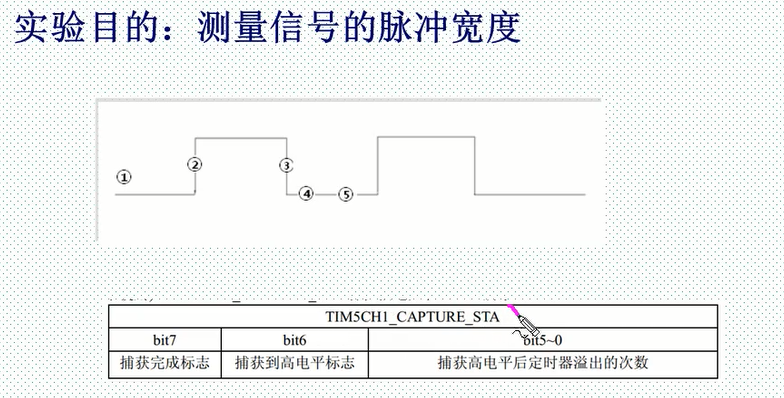
bit7位置1时表示成功捕获完一次高电平(按键按下直到抬起整个过程结束);代码58、66、79
bit6位置1时表示获得高电平的标志位,(表示按键已经按下)代码62、77、87
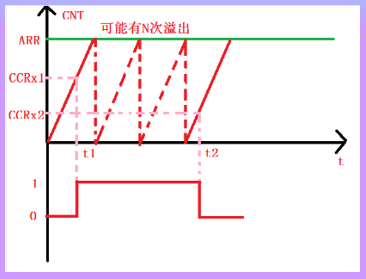
bit0~5位表示高电平时间是定时器溢出的次数(即在按键按下时定时器溢出几次)
如果溢出次数超过了6位所能表示的范围时怎么办?
代码64—68解决办法
就是在TIM5_CH1_CAPTURE_STA==0x3f 时将 TIM5_CH1_CAPTURE_STA变量强制bit7置1(即强制捕获完成去执行主函数代码27以后的代码段,然后重新进行下一次的捕获) TIM5_CH1_CAPTURE_STA|=0x80;
1 #include "input.h"
2
3 u8 TIM5_CH1_CAPTURE_STA; //输入捕获状态
4 u16 TIM5_CH1_CAPTURE_VAL;//输入捕获值
5
6 /*******************************************************************************
7 * 函 数 名 : TIM5_CH1_Input_Init
8 * 函数功能 : TIM5_CH1输入捕获初始化函数
9 * 输 入 : arr:自动重装载值
10 psc:预分频系数
11 * 输 出 : 无
12 *******************************************************************************/
13 void TIM5_CH1_Input_Init(u16 arr,u16 psc)
14 {
15 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
16 TIM_ICInitTypeDef TIM_ICInitStructure;
17 NVIC_InitTypeDef NVIC_InitStructure;
18 GPIO_InitTypeDef GPIO_InitStructure;
19
20 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
21 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5,ENABLE);//使能TIM5时钟
22
23 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;//管脚设置
24 GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD; //设置下拉输入模式
25 GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
26
27 TIM_TimeBaseInitStructure.TIM_Period=arr; //自动装载值
28 TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //分频系数
29 TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
30 TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //设置向上计数模式
31 TIM_TimeBaseInit(TIM5,&TIM_TimeBaseInitStructure);
32
33 TIM_ICInitStructure.TIM_Channel=TIM_Channel_1; //通道1
34 TIM_ICInitStructure.TIM_ICFilter=0x00; //滤波
35 TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Rising;//捕获极性
36 TIM_ICInitStructure.TIM_ICPrescaler=TIM_ICPSC_DIV1; //分频系数
37 TIM_ICInitStructure.TIM_ICSelection=TIM_ICSelection_DirectTI;//直接映射到TI1
38 TIM_ICInit(TIM5,&TIM_ICInitStructure);
39 TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);
40
41 NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;//中断通道
42 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;//抢占优先级
43 NVIC_InitStructure.NVIC_IRQChannelSubPriority =0; //子优先级
44 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
45 NVIC_Init(&NVIC_InitStructure);
46
47 TIM_Cmd(TIM5,ENABLE); //使能定时器
48 }
49
50 /*******************************************************************************
51 * 函 数 名 : TIM5_IRQHandler
52 * 函数功能 : TIM5中断函数
53 * 输 入 : 无
54 * 输 出 : 无
55 *******************************************************************************/
56 void TIM5_IRQHandler(void)
57 {
58 if((TIM5_CH1_CAPTURE_STA&0x80)==0) //还未成功捕获
59 {
60 if(TIM_GetITStatus(TIM5,TIM_IT_Update)) //发生更新中断
61 {
62 if(TIM5_CH1_CAPTURE_STA&0X40)//捕获到了高电平
63 {
64 if((TIM5_CH1_CAPTURE_STA&0x3f)==0x3f) //高电平时间太长
65 {
66 TIM5_CH1_CAPTURE_STA|=0x80; //标志一次捕获成功
67 TIM5_CH1_CAPTURE_VAL=0xffff;
68 }
69 else
70 {
71 TIM5_CH1_CAPTURE_STA++;
72 }
73 }
74 }
75 if(TIM_GetITStatus(TIM5,TIM_IT_CC1)) //发生捕获中断
76 {
77 if(TIM5_CH1_CAPTURE_STA&0X40)//捕获到了高电平
78 {
79 TIM5_CH1_CAPTURE_STA|=0x80; //成功捕获一次高电平
80 TIM5_CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5);
81 TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //设置上升沿捕获
82 }
83 else
84 {
85 TIM5_CH1_CAPTURE_STA=0;
86 TIM5_CH1_CAPTURE_VAL=0;
87 TIM5_CH1_CAPTURE_STA|=0x40; //捕获到高电平标志
88 TIM_Cmd(TIM5,DISABLE);
89 TIM_SetCounter(TIM5,0); //定时器初值为0
90 TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); //设置下降沿捕获
91 TIM_Cmd(TIM5,ENABLE);
92 }
93 }
94 }
95 TIM_ClearITPendingBit(TIM5,TIM_IT_CC1|TIM_IT_Update);
96 }
1 #include "system.h"
2 #include "SysTick.h"
3 #include "led.h"
4 #include "usart.h"
5 #include "input.h"
6
7
8 /*******************************************************************************
9 * 函 数 名 : main
10 * 函数功能 : 主函数
11 * 输 入 : 无
12 * 输 出 : 无
13 *******************************************************************************/
14 int main()
15 {
16 u8 i=0;
17 u32 indata=0;
18
19 SysTick_Init(72);
20 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组 分2组
21 LED_Init();
22 USART1_Init(9600);
23 TIM5_CH1_Input_Init(0xffff,71); //以1M频率计数
24
25 while(1)
26 {
27 if(TIM5_CH1_CAPTURE_STA&0x80) //成功捕获
28 {
29 indata=TIM5_CH1_CAPTURE_STA&0x3f;
30 indata*=0xffff; //溢出次数乘以一次的计数次数时间 us
31 indata+=TIM5_CH1_CAPTURE_VAL;//加上高电平捕获的时间
32 printf("高电平持续时间:%d us\r\n",indata); //总的高电平时间
33 TIM5_CH1_CAPTURE_STA=0; //开始下一次捕获
34 }
35
36 i++;
37 if(i%20==0)
38 {
39 led1=!led1;
40 }
41 delay_ms(10);
42 }
43 }
(stm32f103学习总结)—输入捕获模式的更多相关文章
- STM32输入捕获模式设置并用DMA接收数据
参考: STM32的PWM输入模式设置并用DMA接收数据 Input capture mode The input stage samples the corresponding TIx input ...
- stm32寄存器版学习笔记06 输入捕获(ETR脉冲计数)
STM32外部脉冲ETR引脚:TIM1-->PA12;TIMER2-->PA0:TIMER3-->PD2;TIMER4-->PE0… 1.TIM2 PA0计数 配置步骤 ①开启 ...
- 基于STM32F103和Cube的输入捕获例程
1.开发环境 (1)Cube5.24 (2)Keil5 (3)STM32F103 2.Cube配置 Cube配置很简单,只要打开TIM4通道1的引脚,设置为输入捕获模式,在配置是高或低电平沿触发 TI ...
- stm32 输入捕获学习(一)
输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能.STM32 的输入捕获,简单地说就是通过检测 TIMx_CHx 上的边沿信 ...
- STM32使用定时器实现输入捕获
输入捕获简介输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32的定时器,除了TIM6和TIM7,其他定时器都有输入捕获功能. STM32的输入捕获,简单地说就是通过检测TIMx_CHx上的边沿信 ...
- [pwm]PWM的输入捕捉模式
对于stm32来说,输入捕捉模式有两种: 普通输入捕捉模式:经常用来测量脉冲宽度和频率,例如测量脉冲宽度,TIM5_CH1来捕获高电平脉宽,首先先设置输入捕获为上升沿触发,然后记录下发生上升沿时TIM ...
- STM32之定时器输入捕获
1.输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32的定时器,除了TIM6和TIM7,其他定时器都有输入捕获功能.STM32的输入捕获,简单的说就是通过检测TIMx_CHx上的边沿信号,在边沿 ...
- [置顶]
STM32 输入捕获的脉冲宽度及频率计算
输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能.以下是对脉冲宽度及频率的计算. 1.脉冲宽度 如下图所示,采集该高电平脉冲 ...
- STM32 输入捕获的脉冲宽度及频率计算
输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能.以下是对脉冲宽度及频率的计算. 1.脉冲宽度 如下图所示,采集该高电平脉冲 ...
随机推荐
- kyverno VS gateKeeper
kyverno VS gateKeeper 概述 这两组开源工具都是是基于kubernetes 的webhook机制,支持validatingwebhook和mutatingwebhook.整体思路上 ...
- Hive常用函数大全-字符串函数
1.字符串长度函数:length(X)(返回字符串X的长度) select length('qwerty') from table --6 2.字符串反转函数:reverse(X)(返回字符串X反转的 ...
- Spark on Yarn出现hadoop.compression.lzo.LzoCodec not found问题发现及解决
问题描述: spark.SparkContext: Created broadcast 0 from textFile at WordCount.scala:37 Exception in threa ...
- Objective-C 基础教程第五章,复合
目录 Objective-C 基础教程第五章,复合 什么是复合? Car程序 自定义NSLog() 存取方法get Set Tires(轮胎) 存取方法 Car类代码的其他变化 扩展Car程序 复合还 ...
- Qt:QDateTime、QDate、QTime与QDateTimeEdit
时间日期是经常遇到的数据类型,Qt中的时间日期类如下: QTime:时间类型,只表示时间,如15:23:13: QDate:日期类型,只表示日期,如2017-4-5: QDateTime:日期时间类型 ...
- Chrome:插件安装
1.首先要下载一油猴插件管理器 得到crx文件 2.打开'扩展程序',在Chrome右上角 3.启动开发者模式(右上角),然后将油猴crx文件拖入界面中,会自动安装油猴 安装完成后,在工具栏中会出现油 ...
- Java:安装新版本Java、环境配置
最新版2021年版 Java安装目录 2.在系统变量中设置2项属性,JAVA_HOME.PATH(大小写无所谓),若已存在这点击编辑,不存在则新建 参数为: JAVA_HOME: D:\Java\ ...
- JavaWeb-数据库基础
数据库基础 推荐阅读: 数据库:https://www.cnblogs.com/zwtblog/tag/数据库/ 数据库是学习JavaWeb的一个前置,只有了解了数据库的操作和使用,我们才能更好地组织 ...
- 微信小程序节流使用方法
函数节流: 英文 throttle 有节流阀的意思.大致意思也是 节约触发的频率 那么,函数节流,真正的含义是:单位时间n秒内,第一次触发函数并执行,以后 n秒内不管触发多少次,都不执行.直到下一个单 ...
- tp5 全选,全不选 ,ajax批量删除
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...