PCL 1.60 +windows+vs2010 安装与配置
PCL简介
PCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。如果说OpenCV是2D信息获取与处理的结晶,那么PCL就在3D信息获取与处理上具有同等地位,PCL是BSD授权方式,可以免费进行商业和学术应用。
最近刚接触PCL,发现用到PCL的人还是比较少,可供学习的资料也不多,所以,我想从头开始学习,并记录下学习的过程。如果有兴趣一起学习的同学可以加我微信号zcs9602,我们一起交流学习。
学习资源:
PCL 1.8.0 比较全的安装包及安装步骤:http://unanancyowen.com/en/pcl18/
PCL 相关资料汇总:https://github.com/neilgu00365/Survey-for-SfMMission
PCL 中国点云库:http://www.pclcn.org/
环境:windows+vs2010
如果你没有vs2010我给你分享一个安装包链接:http://pan.baidu.com/s/1pL3I0dH 密码:a53o
一、下载
我用的是PCL 1.6.0 All-In-One Installer,Windows MSVC 2010 (32bit),所以,下面是以这个版本为主。其实,只要下载PCL-1.6.0-AllInOne-msvc2010-win32.exe、OpenNI 1.5.4 (patched)和Sensor 5.1.0 (patched)三个文件就可以了,PCL-1.6.0-AllInOne-msvc2010-win32.exe内部已经包含了全部的依赖库,安装的过程中,OpenNI会安装不上,所以要单独下载,其它的依赖库都可以不用下载。
二、安装
分别安装
1、PCL-1.6.0-AllInOne-msvc2010-win32.exe
2、OpenNI-Win32-1.5.4-Dev.msi
3、Sensor-Win-OpenSource32-5.1.0.msi
注意:你要编译的是Win32和Win64的版本要区别开,PCL和依赖库都统一用同一个版本的,否则运行的时候会报错。
三、配置
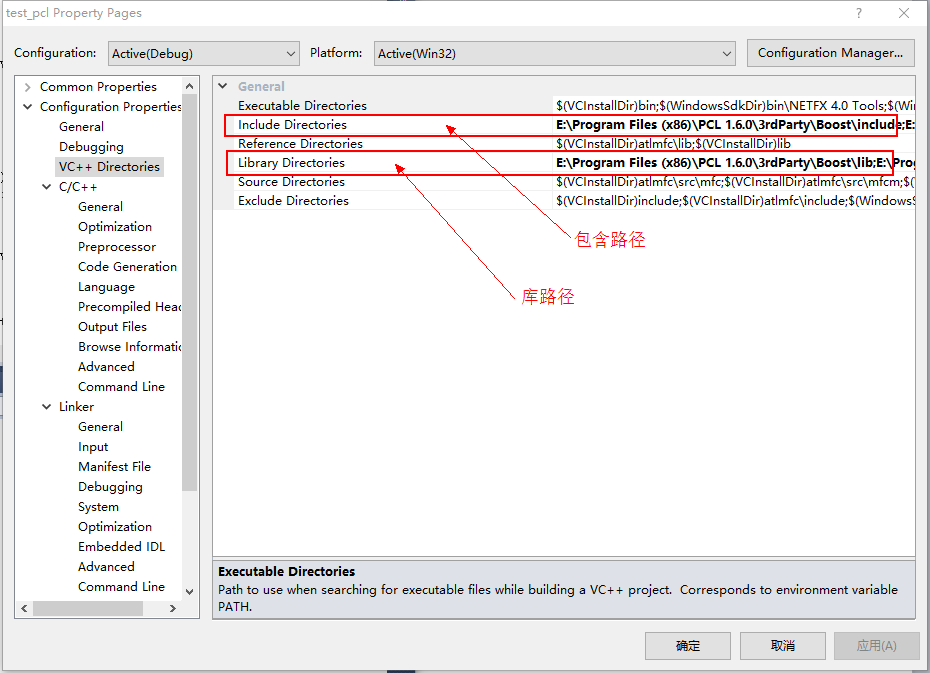
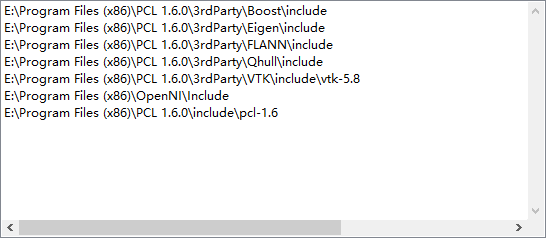
1、配置包含路径
将PCL安装路径下的3rdParty目录下的include添加进去,另外OpenNI单独安装的路径也添加进去,还有PCL安装路径下的Include\pcl-1.6也添加进去。
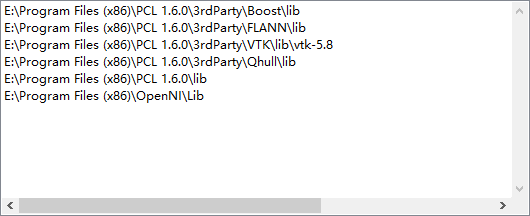
2、配置库路径
将PCL安装路径下的3rdParty目录下的lib添加进去,另外OpenNI单独安装的路径也添加进去,还有PCL安装路径下的lib也添加进去。
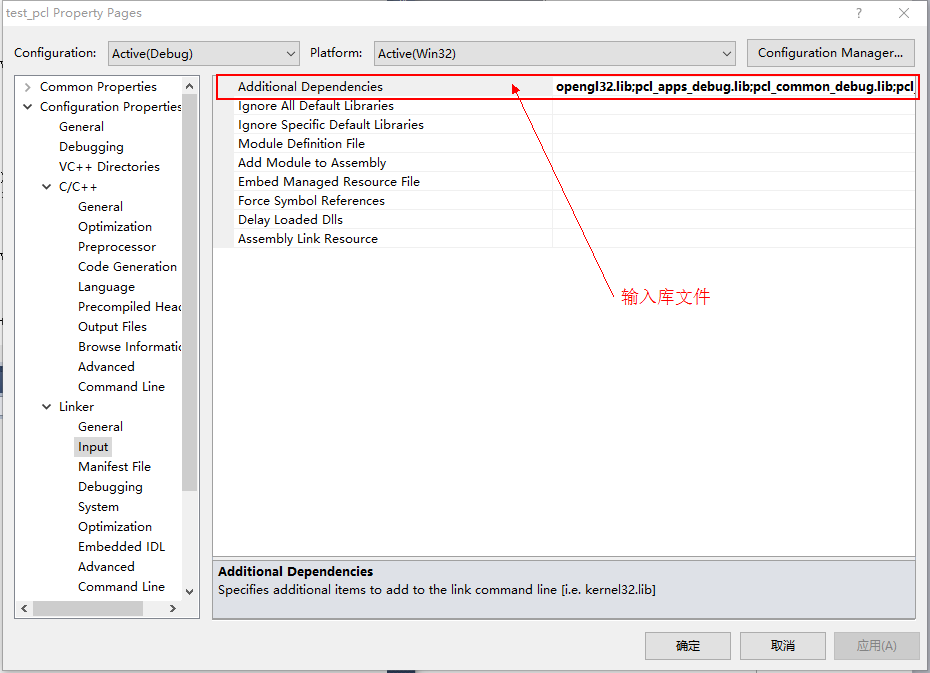
3、配置输入库文件
添加下列文件名
opengl32.lib pcl_apps_debug.lib pcl_common_debug.lib pcl_features_debug.lib pcl_filters_debug.lib pcl_io_debug.lib pcl_io_ply_debug.lib pcl_kdtree_debug.lib pcl_keypoints_debug.lib pcl_octree_debug.lib pcl_registration_debug.lib pcl_sample_consensus_debug.lib pcl_search_debug.lib pcl_segmentation_debug.lib pcl_surface_debug.lib pcl_tracking_debug.lib pcl_visualization_debug.lib flann_cpp_s-gd.lib boost_chrono-vc100-mt-gd-1_49.lib boost_date_time-vc100-mt-gd-1_47.lib boost_date_time-vc100-mt-gd-1_49.lib boost_filesystem-vc100-mt-gd-1_47.lib boost_filesystem-vc100-mt-gd-1_49.lib boost_graph-vc100-mt-gd-1_49.lib boost_graph_parallel-vc100-mt-gd-1_49.lib boost_iostreams-vc100-mt-gd-1_47.lib boost_iostreams-vc100-mt-gd-1_49.lib boost_locale-vc100-mt-gd-1_49.lib boost_math_c99-vc100-mt-gd-1_49.lib boost_math_c99f-vc100-mt-gd-1_49.lib boost_math_tr1-vc100-mt-gd-1_49.lib boost_math_tr1f-vc100-mt-gd-1_49.lib boost_mpi-vc100-mt-gd-1_49.lib boost_prg_exec_monitor-vc100-mt-gd-1_49.lib boost_program_options-vc100-mt-gd-1_49.lib boost_random-vc100-mt-gd-1_49.lib boost_regex-vc100-mt-gd-1_49.lib boost_serialization-vc100-mt-gd-1_49.lib boost_signals-vc100-mt-gd-1_49.lib boost_system-vc100-mt-gd-1_47.lib boost_system-vc100-mt-gd-1_49.lib boost_thread-vc100-mt-gd-1_47.lib boost_thread-vc100-mt-gd-1_49.lib boost_timer-vc100-mt-gd-1_49.lib boost_unit_test_framework-vc100-mt-gd-1_49.lib boost_wave-vc100-mt-gd-1_49.lib boost_wserialization-vc100-mt-gd-1_49.lib libboost_chrono-vc100-mt-gd-1_49.lib libboost_date_time-vc100-mt-gd-1_47.lib libboost_date_time-vc100-mt-gd-1_49.lib libboost_filesystem-vc100-mt-gd-1_47.lib libboost_filesystem-vc100-mt-gd-1_49.lib libboost_graph_parallel-vc100-mt-gd-1_49.lib libboost_iostreams-vc100-mt-gd-1_47.lib libboost_iostreams-vc100-mt-gd-1_49.lib libboost_locale-vc100-mt-gd-1_49.lib libboost_math_c99-vc100-mt-gd-1_49.lib libboost_math_c99f-vc100-mt-gd-1_49.lib libboost_math_tr1-vc100-mt-gd-1_49.lib libboost_math_tr1f-vc100-mt-gd-1_49.lib libboost_mpi-vc100-mt-gd-1_49.lib libboost_prg_exec_monitor-vc100-mt-gd-1_49.lib libboost_program_options-vc100-mt-gd-1_49.lib libboost_random-vc100-mt-gd-1_49.lib libboost_regex-vc100-mt-gd-1_49.lib libboost_serialization-vc100-mt-gd-1_49.lib libboost_signals-vc100-mt-gd-1_49.lib libboost_system-vc100-mt-gd-1_47.lib libboost_system-vc100-mt-gd-1_49.lib libboost_test_exec_monitor-vc100-mt-gd-1_49.lib libboost_thread-vc100-mt-gd-1_47.lib libboost_thread-vc100-mt-gd-1_49.lib libboost_timer-vc100-mt-gd-1_49.lib libboost_unit_test_framework-vc100-mt-gd-1_49.lib libboost_wave-vc100-mt-gd-1_49.lib libboost_wserialization-vc100-mt-gd-1_49.lib vtkalglib-gd.lib vtkCharts-gd.lib vtkCommon-gd.lib vtkDICOMParser-gd.lib vtkexoIIc-gd.lib vtkexpat-gd.lib vtkFiltering-gd.lib vtkfreetype-gd.lib vtkftgl-gd.lib vtkGenericFiltering-gd.lib vtkGeovis-gd.lib vtkGraphics-gd.lib vtkhdf5-gd.lib vtkHybrid-gd.lib vtkImaging-gd.lib vtkInfovis-gd.lib vtkIO-gd.lib vtkjpeg-gd.lib vtklibxml2-gd.lib vtkmetaio-gd.lib vtkNetCDF-gd.lib vtkNetCDF_cxx-gd.lib vtkpng-gd.lib vtkproj4-gd.lib vtkRendering-gd.lib vtksqlite-gd.lib vtksys-gd.lib vtktiff-gd.lib vtkverdict-gd.lib vtkViews-gd.lib vtkVolumeRendering-gd.lib vtkWidgets-gd.lib vtkzlib-gd.lib
文件有点多,这里可以有个比较快的方法:这里以vtk为例,
打开CMD->进入PCL的安装目录->进入3rdParty\VTK\lib\vtk-5.8目录->输入命令:dir /b *gd.lib -> list.txt
命令的意思是找出gd.lib结尾的文件并保存到list.txt文档里面。然后当前目录就会生成list.txt

四、Demo
例程:
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h> int user_data; void viewerOneOff (pcl::visualization::PCLVisualizer& viewer)
{
viewer.setBackgroundColor (, , );
pcl::PointXYZ o;
o.x = 1.0;
o.y = ;
o.z = ;
viewer.addSphere (o, 0.25, "sphere", );
std::cout << "i only run once" << std::endl; } void viewerPsycho (pcl::visualization::PCLVisualizer& viewer)
{
static unsigned count = ;
std::stringstream ss;
ss << "Once per viewer loop: " << count++;
viewer.removeShape ("text", );
viewer.addText (ss.str(), , , "text", ); //FIXME: possible race condition here:
user_data++;
} int main ()
{
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::io::loadPCDFile ("my_point_cloud.pcd", *cloud); pcl::visualization::CloudViewer viewer("Cloud Viewer"); //blocks until the cloud is actually rendered
viewer.showCloud(cloud); //use the following functions to get access to the underlying more advanced/powerful
//PCLVisualizer //This will only get called once
viewer.runOnVisualizationThreadOnce (viewerOneOff); //This will get called once per visualization iteration
viewer.runOnVisualizationThread (viewerPsycho);
while (!viewer.wasStopped ())
{
//you can also do cool processing here
//FIXME: Note that this is running in a separate thread from viewerPsycho
//and you should guard against race conditions yourself...
user_data++;
}
return ;
}
以上效果图是用realsense的SR300获取到我桌面的点云。
my_point_cloud.pcd 文件 链接:http://pan.baidu.com/s/1gfD2lF1 密码:cexi
五、总结分享
1、pcd读取有点慢,据说pcd数据以有序点云的方式保存会好一点,但是没我试了没看出来能快多少,这个有待研究。
2、SR300直接获取的深度图像和RGB图像坐标上有偏差,这个考虑下怎么做对齐。
3、如果工程配置上SR300的SDK和opencv,我们就不需要在另一个工程先保存pcd文件再读取,中间就可以省了很多步骤。
4、PCL的学习资料还是很少,目前听说比较好也就只有《点云库PCL学习教程》,我也买了一本,慢慢学吧。
公众号奉上~欢迎来搞!

PCL 1.60 +windows+vs2010 安装与配置的更多相关文章
- opencv学习(1.2) - Windows 10 安装OpenCV &配置VS 2015
windows 10 安装OpenCV&配置VS 2015 环境 系统:Windows 10 OpenCV版本:3.4.1 开发IDE:VS2015 社区版 下载安装 下载OpenCV 3.4 ...
- windows下安装和配置mongoDB
上次在mac下安装和配置了mongodb,这次在windows下也尝试安装和配置mongodb. 1.首先下载mongodb压缩包,下载后解压到D盘或E盘.如下: 2.配置环境变量:桌面—计算机右键— ...
- PHP学习之-Mongodb在Windows下安装及配置
Mongodb在Windows下安装及配置 1.下载 下载地址:http://www.mongodb.org/ 建议下载zip版本. 2.安装 下载windows版本安装就和普通的软件一样,直接下一步 ...
- PHP 1:在Windows上安装和配置PHP,Apache和My SQL
原文:PHP 1:在Windows上安装和配置PHP,Apache和My SQL 如果你Google一把类似的主题,你会发现相关的文章可以塞满你的硬盘.在这里之所以把它再次拿出来,目的是想记录我作为一 ...
- windows下安装和配置redis
1.windows下安装和配置redis 1.1 下载: 官网(linux下载地址):https://redis.io/ Windows系统下载地址:https://github.com/MSOpen ...
- windows下安装和配置多个版本的JDK
https://jingyan.baidu.com/article/47a29f2474ba55c015239957.html 如何在windows下安装和配置多个版本的jdk,本文将带你在windo ...
- 网络基础 Windows下安装和配置net-snmp 代理
Windows 下安装和配置net-snmp 代理[摘录] by:授客 QQ:1033553122 A. 安装 1. 安装前准备 ActivePerl-5.10.0.1004-MSWin ...
- 基于svnserve的SVN服务器(windows下安装与配置)
基于svnserve的SVN服务器(windows下安装与配置) 基于svnserve的SVN服务器(windows下安装与配置)关键字: svn 安装SVNserve 从http://subvers ...
- CentOS 6.5系统使用yum方式安装LAMP环境和phpMyAdmin,mysql8.0.1/mysql5.7.22+centos7,windows mysql安装、配置
介绍如何在CentOs6.2下面使用YUM配置安装LAMP环境,一些兄弟也很喜欢使用编译的安装方法,个人觉得如果不是对服务器做定制,用yum安装稳定简单,何必去download&make&am ...
随机推荐
- 浅谈Linux虚拟内存
我的orangepi内存很少,所以我打算给它弄个虚拟内存 首先建立一个1G的空文件: dd if=/dev/zero of=/home/swapfile bs=64M count=16 格式化为swa ...
- 谈谈浏览器http缓存
请求头 user-agent pragma Cache-control Referer Accept Cookit If-Modified-Since If-None-Match 响应头 conten ...
- mysql水平分表和垂直分表的优缺点
表分割有两种方式: 1.水平分割:根据一列或多列数据的值把数据行放到两个独立的表中. 水平分割通常在下面的情况下使用. •表很大,分割后可以降低在查询时需要读的数据和索引的页数,同时也降低了索引的层数 ...
- MongoDB的备份和部署 高级功能索引,聚合复制,分片
创建备份 MongoDB 数据转储 为了在 MongoDB 中创建数据库备份,需要使用 mongodump 命令.该命令会将服务器上的所有数据都转储到 dump 目录中.你可以使用很多选项来限制转储的 ...
- java围棋游戏源代码
//李雨泽源代码,不可随意修改.//时间:2017年9月22号.//地点:北京周末约科技有限公司.//package com.bao; /*围棋*/ /*import java.awt.*; impo ...
- 【转】开源中国上看到的一个vim的自动配置的好东西,分享下
https://www.oschina.net/p/onekey-to-vim-ide 变量有高亮,竖行上有直线定位,对python的支持效果更佳,从事C/C++开发的程序员使用也不错.
- Apache Spark 2.2.0 中文文档 - Submitting Applications | ApacheCN
Submitting Applications 在 script in Spark的 bin 目录中的spark-submit 脚本用与在集群上启动应用程序.它可以通过一个统一的接口使用所有 Spar ...
- APUE 4 - 线程
对传统的UNIX进程来讲,一个进程中只有一个线程,这就意味着一个进程在同一时刻只能做一件事(即使是多核CPU).使用多线程技术, 我们可以设计程序使得一个进程在同一时刻做多件事.使用多线程编程具有以下 ...
- Saturday SQL Server 2016 初体验
最近在开发一个有关数据库的项目,我想用SQLite,但是SQLite的设计器不是特别友好,然后据说VS有一个集成的SQLite设计器,但是我用的VS2017亲测并没有,用户体验不佳,所以安装一个SQL ...
- Java面向对象 继承(下)
Java面向对象 继承(下) 知识概要: (1)抽象类 1.1 抽象类概述 1.2 抽象类的特点 ...