深度学习目标检测:RCNN,Fast,Faster,YOLO,SSD比较
转载出处:http://blog.csdn.net/ikerpeng/article/details/54316814
知乎的图可以放大,更清晰,链接:https://www.zhihu.com/question/35887527/answer/140239982
这篇博文很简单,我就画了一个图,将各自的要点进行比较说明。
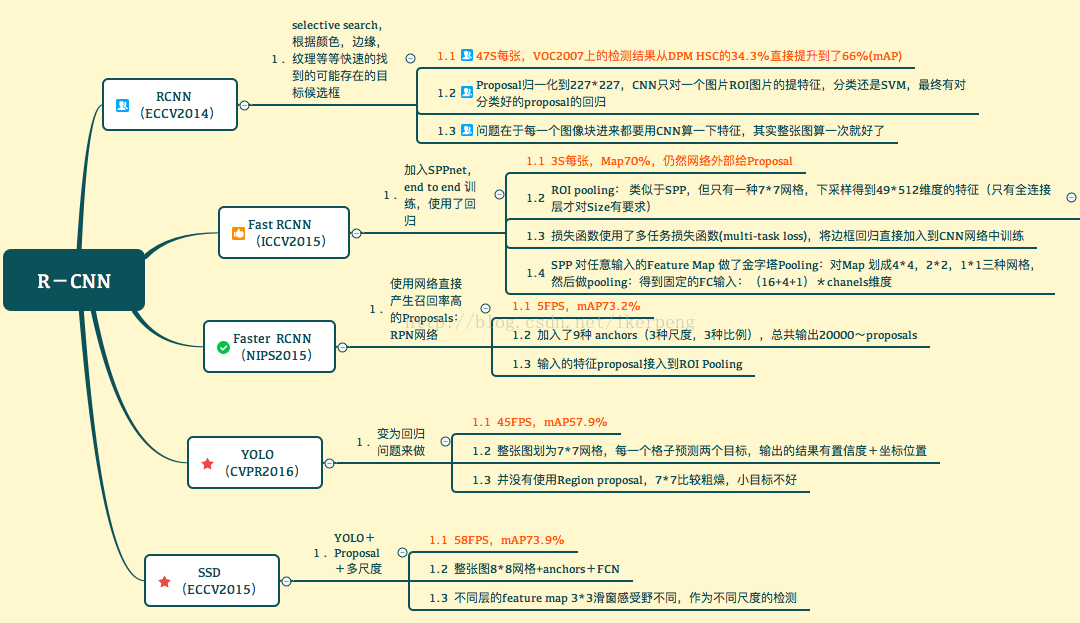
相信这样看过去就一目了然了,但是需要说明的还是: YOLO可能不应该放在这里,但是为了和SSD进行比较还是放了。另外,YOLO出了第二版本了,所以放在这边也没有问题。
个人觉得,分析比较Faster Yolo SSD这几种算法,有一个问题要先回答,Yolo SSD为什么快?
最主要的原因还是提proposal(最后输出将全连接换成全卷积也是一点)。其实总结起来我认为有两种方式:1.RPN,2. 暴力划分。RPN的设计相当于是一个sliding window 对最后的特征图每一个位置都进行了估计,由此找出anchor上面不同变换的proposal,设计非常经典,代价就是sliding window的代价。相比较 yolo比较暴力 ,直接划为7*7的网格,估计以网格为中心两个位置也就是总共98个”proposal“。快的很明显,精度和格子的大小有关。SSD则是结合:不同layer输出的输出的不同尺度的 Feature Map提出来,划格子,多种尺度的格子,在格子上提“anchor”。结果显而易见。
需要说明一个核心: 目前虽然已经有更多的RCNN,但是Faster RCNN当中的RPN仍然是一个经典的设计。下面来说一下RPN: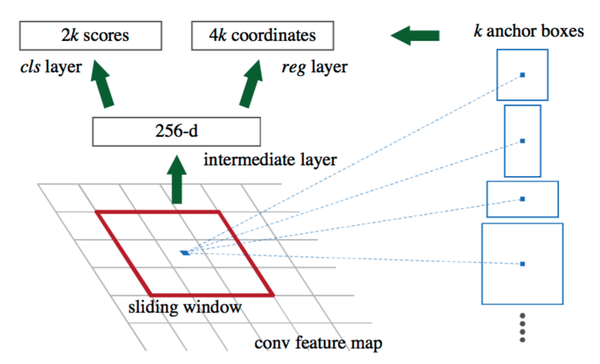
在Faster RCNN当中,一张大小为224*224的图片经过前面的5个卷积层,输出256张大小为13*13的 特征图(你也可以理解为一张13*13*256大小的特征图,256表示通道数)。接下来将其输入到RPN网络,输出可能存在目标的reign WHk个(其中WH是特征图的大小,k是anchor的个数)。
实际上,这个RPN由两部分构成:一个卷积层,一对全连接层分别输出分类结果(cls layer)以及 坐标回归结果(reg layer)。卷积层:stride为1,卷积核大小为3*3,输出256张特征图(这一层实际参数为3*3*256*256)。相当于一个sliding window 探索输入特征图的每一个3*3的区域位置。当这个13*13*256特征图输入到RPN网络以后,通过卷积层得到13*13个 256特征图。也就是169个256维的特征向量,每一个对应一个3*3的区域位置,每一个位置提供9个anchor。于是,对于每一个256维的特征,经过一对 全连接网络(也可以是1*1的卷积核的卷积网络),一个输出 前景还是背景的输出2D;另一个输出回归的坐标信息(x,y,w, h,4*9D,但实际上是一个处理过的坐标位置)。于是,在这9个位置附近求到了一个真实的候选位置。
深度学习目标检测:RCNN,Fast,Faster,YOLO,SSD比较的更多相关文章
- 论文学习-深度学习目标检测2014至201901综述-Deep Learning for Generic Object Detection A Survey
目录 写在前面 目标检测任务与挑战 目标检测方法汇总 基础子问题 基于DCNN的特征表示 主干网络(network backbone) Methods For Improving Object Rep ...
- 深度学习 目标检测算法 SSD 论文简介
深度学习 目标检测算法 SSD 论文简介 一.论文简介: ECCV-2016 Paper:https://arxiv.org/pdf/1512.02325v5.pdf Slides:http://w ...
- zz深度学习目标检测2014至201901综述
论文学习-深度学习目标检测2014至201901综述-Deep Learning for Generic Object Detection A Survey 发表于 2019-02-14 | 更新 ...
- (转)深度学习目标检测指标mAP
深度学习目标检测指标mAP https://github.com/rafaelpadilla/Object-Detection-Metrics 参考上面github链接中的readme,有详细描述
- 基于候选区域的深度学习目标检测算法R-CNN,Fast R-CNN,Faster R-CNN
参考文献 [1]Rich feature hierarchies for accurate object detection and semantic segmentation [2]Fast R-C ...
- 深度学习目标检测综述推荐之 Xiaogang Wang ISBA 2015
一.INTRODUCTION部分 (1)先根据时间轴讲了历史 (2)常见的基础模型 (3)讲了深度学习的优势 那就是feature learning,而不用人工划分的feature engineeri ...
- 深度学习论文笔记:Fast R-CNN
知识点 mAP:detection quality. Abstract 本文提出一种基于快速区域的卷积网络方法(快速R-CNN)用于对象检测. 快速R-CNN采用多项创新技术来提高训练和测试速度,同时 ...
- 深度剖析目标检测算法YOLOV4
深度剖析目标检测算法YOLOV4 目录 简述 yolo 的发展历程 介绍 yolov3 算法原理 介绍 yolov4 算法原理(相比于 yolov3,有哪些改进点) YOLOV4 源代码日志解读 yo ...
- 利用 ImageAI 在 COCO 上学习目标检测
ImageAI是一个python库,旨在使开发人员能够使用简单的几行代码构建具有包含深度学习和计算机视觉功能的应用程序和系统. 这个 AI Commons 项目https://commons.spec ...
随机推荐
- 网络编程—tcp
一.TCP简介 TCP介绍 TCP协议,传输控制协议(英语:Transmission Control Protocol,缩写为 TCP)是一种面向连接的.可靠的.基于字节流的传输层通信协议,由IETF ...
- mysql 去除重复 Select中DISTINCT关键字的用法 在使用mysql时,有时需要查询出某个字段不重复的记录,虽然mysql提供 有distinct这个关键字来过滤掉多余的重复记录只保留一条,但往往只用它来返回不重复记录的条数,而不是用它来返回不重记录的所有值。其原因是 distinct只能返回它的目标字段,而无法返回其它字段,这个问题让我困扰了很久,用distinct不能解决的话,
在使用mysql时,有时需要查询出某个字段不重复的记录,虽然mysql提供 有distinct这个关键字来过滤掉多余的重复记录只保留一条,但往往只用它来返回不重复记录的条数,而不是用它来返回不重记 ...
- 饮冰三年-人工智能-Python-10之C#与Python的对比
1:注释 C# 中 单行注释:// 多行注释:/**/ python 中 单行注释:# 多行注释:“““内容””” 2:字符串 C#中 "" 用双引号如("我是字符串&q ...
- springboot的创建
- Python数据分析几个比较常用的方法
1,表头或是excel的索引如果是中文的话,输出会出错 解决方法:python的版本问题!换成python3就自动解决了!当然也有其他的方法,这里就不再深究 2,如果有很多列,如何输出指定的列? ...
- webpack+vue打包之后输出配置文件修改接口文件
用vue-cli构建的项目通常是采用前后端分离的开发模式,也就是前端与后台完全分离,此时就需要将后台接口地址打包进项目中,but,难道我们只是改个接口地址也要重新打包吗?当然不行了,那就太麻烦了,怎么 ...
- Context连接和断开的情况下的CRUD操作
连续情况下的CRUD操作是一项相当容易的任务,因为默认情况下,上下文会自动跟踪实体在其生命周期中发生的更改,AutoDetectChangesEnabled为true. 以下示例显示如何添加,更新和删 ...
- 真的分治fft
以前学的分治fft f[i]=sigma(f[i-x]*g[x]),其中g[x]已知 那么我们可以用cdq分治来做(l,mid 对mid+1,t的影响) 而现在的$f[i]=sum(f(i-x)*f( ...
- [转]笔记本怎么设置WIfi热点
https://jingyan.baidu.com/article/335530da4f774019cb41c3eb.html 随着手机的发展,流量的消耗也是大大地增加.虽然很多手机支持wifi,但是 ...
- ssh连接时提示THE AUTHENTICITY OF HOST XX CAN’T BE ESTABLISHED
ssh链接云主机: ssh root@123.59.xx.xx 报错:THE AUTHENTICITY OF HOST XX CAN’T BE ESTABLISHED 解决办法: ssh -o Str ...