c#数字图像处理(十二)图像的腐蚀与膨胀
背景知识
腐蚀与膨胀基本原理:就是用一个特定的结构元素来与待处理图像按像素做逻辑操作;可以理解成拿一个带孔的网格板(结构元素矩阵中元素为1的为孔)盖住图像的某一部分,然后按照各种不同的观察方式来确定操作类型。
比如:腐蚀操作就是拿这个结构元素的中心位置(假设参与逻辑计算的元素对应与二维矩阵中元素为1的点,即网格板上的孔),在图像上移动时,如果透过所有的孔都能看到底下的图像,那么这个中心点处的图像就保留,否则去除。
腐蚀
图像腐蚀运算定义
二值图像腐蚀运算的数学表达式为
g(x,y)=erode[f(x, y ), B]=AND[Bf(x,y)]
其中,g(x,y)为腐蚀后的二值图像,f(x,y)为原二值图像,B为结构元素。B(x,y)定义为:
Bf(x,y)={f(x-bx, y-by) ,(bx, by)∈B}
算子AND(x1,…,xn)定义为:当且仅当x1=··=xn=1时,AND(x1,…,xn)等于1;否则为0。
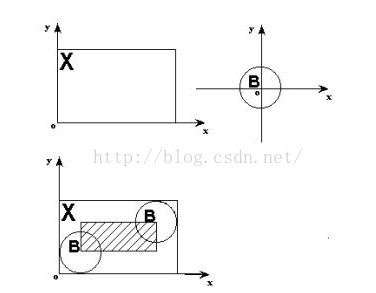
把结构元素B平移a后得到Ba,若Ba包含于X,我们记下这个a点,所有满足上述条件的a点组成的集合称做X被B腐蚀(Erosion)的结果。用公式表示为:E(X)={a| Ba∈X}=XB。原理图如下:
实际使用时示意图:
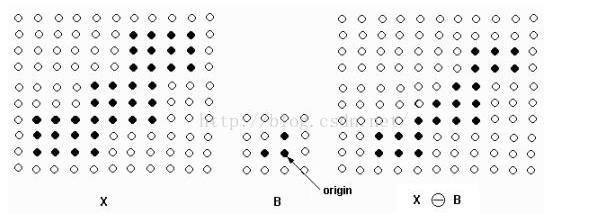
说明:左边是被处理的图象X(二值图象,我们针对的是黑点),中间是结构元素B,那个标有origin的点是中心点,即当前处理元素的位置,我们在介绍模板操作时也有过类似的概念。腐蚀的方法是,拿B的中心点和X上的点一个一个地对比,如果B上的所有点都在X的范围内,则该点保留,否则将该点去掉;右边是腐蚀后的结果。可以看出,它仍在原来X的范围内,且比X包含的点要少,就象X被腐蚀掉了一层。
private void erode_Click(object sender, EventArgs e)
{
if (curBitmap != null)
{
struction struForm = new struction();
struForm.Text = "腐蚀运算结构元素";
if (struForm.ShowDialog() == DialogResult.OK)
{
Rectangle rect = new Rectangle(, , curBitmap.Width, curBitmap.Height);
BitmapData bmpData = curBitmap.LockBits(rect, ImageLockMode.ReadWrite, curBitmap.PixelFormat);
IntPtr ptr = bmpData.Scan0;
int bytes = curBitmap.Width * curBitmap.Height;
byte[] grayValues = new byte[bytes];
Marshal.Copy(ptr, grayValues, , bytes); //得到结构元素
byte flagStru = struForm.GetStruction; byte[] tempArray = new byte[bytes];
for (int i = ; i < bytes; i++)
{
tempArray[i] = ;
}
switch (flagStru)
{
case 0x11:
//3位水平方向结构元素
for (int i = ; i < curBitmap.Height; i++)
{
for (int j = ; j < curBitmap.Width - ; j ++)
{
if (grayValues[i * curBitmap.Width + j] == &&
grayValues[i * curBitmap.Width + j + ] == &&
grayValues[i * curBitmap.Width + j - ] == )
{
tempArray[i * curBitmap.Width + j] = ;
}
}
}
break;
case 0x21:
//5位水平方向结构元素
for (int i = ; i < curBitmap.Height; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[i * curBitmap.Width + j] == &&
grayValues[i * curBitmap.Width + j + ] == &&
grayValues[i * curBitmap.Width + j - ] == &&
grayValues[i * curBitmap.Width + j + ] == &&
grayValues[i * curBitmap.Width + j - ] == )
{
tempArray[i * curBitmap.Width + j] = ;
}
}
}
break;
case 0x12:
//3位垂直方向结构元素
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width; j++)
{
if (grayValues[i * curBitmap.Width + j] == &&
grayValues[(i - ) * curBitmap.Width + j] == &&
grayValues[(i + ) * curBitmap.Width + j] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x22:
//5位垂直方向结构元素
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width; j++)
{
if (grayValues[i * curBitmap.Width + j] == &&
grayValues[(i - ) * curBitmap.Width + j] == &&
grayValues[(i + ) * curBitmap.Width + j] == &&
grayValues[(i - ) * curBitmap.Width + j] == &&
grayValues[(i + ) * curBitmap.Width + j] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x14:
//3位十字形状结构元素
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[i * curBitmap.Width + j] == &&
grayValues[(i - ) * curBitmap.Width + j] == &&
grayValues[(i + ) * curBitmap.Width + j] == &&
grayValues[i * curBitmap.Width + j + ] == &&
grayValues[i * curBitmap.Width + j - ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x24:
//5位十字形状结构元素
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[i * curBitmap.Width + j] == &&
grayValues[(i - ) * curBitmap.Width + j] == &&
grayValues[(i + ) * curBitmap.Width + j] == &&
grayValues[(i - ) * curBitmap.Width + j] == &&
grayValues[(i + ) * curBitmap.Width + j] == &&
grayValues[i * curBitmap.Width + j + ] == &&
grayValues[i * curBitmap.Width + j - ] == &&
grayValues[i * curBitmap.Width + j + ] == &&
grayValues[i * curBitmap.Width + j - ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x18:
//3位方形结构元素
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[i * curBitmap.Width + j] == &&
grayValues[(i - ) * curBitmap.Width + j] == &&
grayValues[(i + ) * curBitmap.Width + j] == &&
grayValues[i * curBitmap.Width + j + ] == &&
grayValues[i * curBitmap.Width + j - ] == &&
grayValues[(i - ) * curBitmap.Width + j - ] == &&
grayValues[(i + ) * curBitmap.Width + j - ] == &&
grayValues[(i - ) * curBitmap.Width + j + ] == &&
grayValues[(i + ) * curBitmap.Width + j + ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x28:
//5位方形结构元素
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[(i - ) * curBitmap.Width + j - ] == &&
grayValues[(i - ) * curBitmap.Width + j - ] == &&
grayValues[(i - ) * curBitmap.Width + j] == &&
grayValues[(i - ) * curBitmap.Width + j + ] == &&
grayValues[(i - ) * curBitmap.Width + j + ] == &&
grayValues[(i - ) * curBitmap.Width + j - ] == &&
grayValues[(i - ) * curBitmap.Width + j - ] == &&
grayValues[(i - ) * curBitmap.Width + j] == &&
grayValues[(i - ) * curBitmap.Width + j + ] == &&
grayValues[(i - ) * curBitmap.Width + j + ] == &&
grayValues[i * curBitmap.Width + j - ] == &&
grayValues[i * curBitmap.Width + j - ] == &&
grayValues[i * curBitmap.Width + j] == &&
grayValues[i * curBitmap.Width + j + ] == &&
grayValues[i * curBitmap.Width + j + ] == &&
grayValues[(i + ) * curBitmap.Width + j - ] == &&
grayValues[(i + ) * curBitmap.Width + j - ] == &&
grayValues[(i + ) * curBitmap.Width + j] == &&
grayValues[(i + ) * curBitmap.Width + j + ] == &&
grayValues[(i + ) * curBitmap.Width + j + ] == &&
grayValues[(i + ) * curBitmap.Width + j - ] == &&
grayValues[(i + ) * curBitmap.Width + j - ] == &&
grayValues[(i + ) * curBitmap.Width + j] == &&
grayValues[(i + ) * curBitmap.Width + j + ] == &&
grayValues[(i + ) * curBitmap.Width + j + ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
default:
MessageBox.Show("错误的结构元素!");
break;
} grayValues = (byte[])tempArray.Clone();
Marshal.Copy(grayValues, , ptr, bytes);
curBitmap.UnlockBits(bmpData);
} Invalidate();
}
}
#region 关于图像尺寸的说明
//本代码只能处理8位深度的512*512图像。可自行修改,如修改3位水平方向结构元素代码:
//01修改成如下代码即可处理任意尺寸的8位深度的图像
//int bytes = bmpData.Stride * curBitmap.Height;
//for (int i = 0; i < curBitmap.Height; i++)
//{
// for (int j = 1; j < curBitmap.Width - 1; j++)
// {
// if (grayValues[i * bmpData.Stride + j] == 0 &&
// grayValues[i * bmpData.Stride + j + 3] == 0 &&
// grayValues[i * bmpData.Stride + j - 1] == 0)
// {
// tempArray[i * bmpData.Stride + j] = 0;
// tempArray[i * bmpData.Stride + j + 1] = 0;
// tempArray[i * bmpData.Stride + j + 2] = 0;
// }
// }
//}
//02修改成如下代码即可处理任意尺寸的24位深度的图像
//int bytes = bmpData.Stride * curBitmap.Height;
//for (int i = 0; i < curBitmap.Height; i++)
//{
// for (int j = 4; j < curBitmap.Width * 3 - 3; j += 3)
// {
// if (grayValues[i * bmpData.Stride + j] == 0 &&
// grayValues[i * bmpData.Stride + j + 3] == 0 &&
// grayValues[i * bmpData.Stride + j - 1] == 0)
// {
// tempArray[i * bmpData.Stride + j] = 0;
// tempArray[i * bmpData.Stride + j + 1] = 0;
// tempArray[i * bmpData.Stride + j + 2] = 0;
// }
// }
//}
#endregion
膨胀
图像膨胀运算定义
二值图像膨胀运算的数学表达式为:
g(x, y)=dilate[f(x, y), B]=OR[Bf(x,y)]
其中,g(x,y)为膨胀后的二值图像,f(x,y)为原二值图像,B为结构元素。
B(x,y)定义为:
Bf(x,y)={f(x-bx, y-by) ,(bx, by)∈B}
算子OR(x1…xn)定义为:当且仅当x1=…=xn=0时,OR(x1,…xn)等于0;否则为1
膨胀(dilation)可以看做是腐蚀的对偶运算,其定义是:把结构元素B平移a后得到Ba,若Ba击中X,我们记下这个a点。所有满足上述条件的a点组成的集合称做X被B膨胀的结果。用公式表示为:D(X)={a | Ba↑X}=X  B,如图6.13所示。图6.13中X是被处理的对象,B是结构元素,不难知道,对于任意一个在阴影部分的点a,Ba击中X,所以X被B膨胀的结果就是那个阴影部分。阴影部分包括X的所有范围,就象X膨胀了一圈似的,这就是为什么叫膨胀的原因。原理图如下:
B,如图6.13所示。图6.13中X是被处理的对象,B是结构元素,不难知道,对于任意一个在阴影部分的点a,Ba击中X,所以X被B膨胀的结果就是那个阴影部分。阴影部分包括X的所有范围,就象X膨胀了一圈似的,这就是为什么叫膨胀的原因。原理图如下:
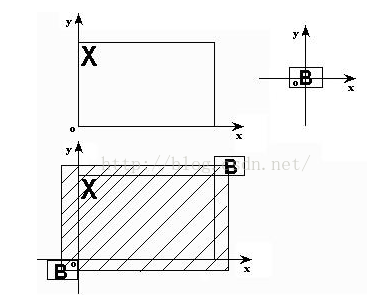
实际使用时示意图:

说明:左边是被处理的图象X(二值图象,我们针对的是黑点),中间是结构元素B。膨胀的方法是,拿B的中心点和X上的点及X周围的点一个一个地对,如果B上有一个点落在X的范围内,则该点就为黑;右边是膨胀后的结果。可以看出,它包括X的所有范围,就象X膨胀了一圈似的。
private void dilate_Click(object sender, EventArgs e)
{
if (curBitmap != null)
{
struction struForm = new struction();
struForm.Text = "膨胀运算结构元素";
if (struForm.ShowDialog() == DialogResult.OK)
{
Rectangle rect = new Rectangle(, , curBitmap.Width, curBitmap.Height);
BitmapData bmpData = curBitmap.LockBits(rect, ImageLockMode.ReadWrite, curBitmap.PixelFormat);
IntPtr ptr = bmpData.Scan0;
int bytes = curBitmap.Width * curBitmap.Height;
byte[] grayValues = new byte[bytes];
Marshal.Copy(ptr, grayValues, , bytes); byte flagStru = struForm.GetStruction; byte[] tempArray = new byte[bytes];
for (int i = ; i < bytes; i++)
{
tempArray[i] = ;
} switch (flagStru)
{
case 0x11:
for (int i = ; i < curBitmap.Height; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[i * curBitmap.Width + j] == ||
grayValues[i * curBitmap.Width + j + ] == ||
grayValues[i * curBitmap.Width + j - ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x21:
for (int i = ; i < curBitmap.Height; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[i * curBitmap.Width + j] == ||
grayValues[i * curBitmap.Width + j + ] == ||
grayValues[i * curBitmap.Width + j - ] == ||
grayValues[i * curBitmap.Width + j + ] == ||
grayValues[i * curBitmap.Width + j - ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x12:
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width; j++)
{
if (grayValues[i * curBitmap.Width + j] == ||
grayValues[(i - ) * curBitmap.Width + j] == ||
grayValues[(i + ) * curBitmap.Width + j] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x22:
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width; j++)
{
if (grayValues[i * curBitmap.Width + j] == ||
grayValues[(i - ) * curBitmap.Width + j] == ||
grayValues[(i + ) * curBitmap.Width + j] == ||
grayValues[(i - ) * curBitmap.Width + j] == ||
grayValues[(i + ) * curBitmap.Width + j] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x14:
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[i * curBitmap.Width + j] == ||
grayValues[(i - ) * curBitmap.Width + j] == ||
grayValues[(i + ) * curBitmap.Width + j] == ||
grayValues[i * curBitmap.Width + j + ] == ||
grayValues[i * curBitmap.Width + j - ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x24:
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[i * curBitmap.Width + j] == ||
grayValues[(i - ) * curBitmap.Width + j] == ||
grayValues[(i + ) * curBitmap.Width + j] == ||
grayValues[(i - ) * curBitmap.Width + j] == ||
grayValues[(i + ) * curBitmap.Width + j] == ||
grayValues[i * curBitmap.Width + j + ] == ||
grayValues[i * curBitmap.Width + j - ] == ||
grayValues[i * curBitmap.Width + j + ] == ||
grayValues[i * curBitmap.Width + j - ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x18:
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[i * curBitmap.Width + j] == ||
grayValues[(i - ) * curBitmap.Width + j] == ||
grayValues[(i + ) * curBitmap.Width + j] == ||
grayValues[i * curBitmap.Width + j + ] == ||
grayValues[i * curBitmap.Width + j - ] == ||
grayValues[(i - ) * curBitmap.Width + j - ] == ||
grayValues[(i + ) * curBitmap.Width + j - ] == ||
grayValues[(i - ) * curBitmap.Width + j + ] == ||
grayValues[(i + ) * curBitmap.Width + j + ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
case 0x28:
for (int i = ; i < curBitmap.Height - ; i++)
{
for (int j = ; j < curBitmap.Width - ; j++)
{
if (grayValues[(i - ) * curBitmap.Width + j - ] == ||
grayValues[(i - ) * curBitmap.Width + j - ] == ||
grayValues[(i - ) * curBitmap.Width + j] == ||
grayValues[(i - ) * curBitmap.Width + j + ] == ||
grayValues[(i - ) * curBitmap.Width + j + ] == ||
grayValues[(i - ) * curBitmap.Width + j - ] == ||
grayValues[(i - ) * curBitmap.Width + j - ] == ||
grayValues[(i - ) * curBitmap.Width + j] == ||
grayValues[(i - ) * curBitmap.Width + j + ] == ||
grayValues[(i - ) * curBitmap.Width + j + ] == ||
grayValues[i * curBitmap.Width + j - ] == ||
grayValues[i * curBitmap.Width + j - ] == ||
grayValues[i * curBitmap.Width + j] == ||
grayValues[i * curBitmap.Width + j + ] == ||
grayValues[i * curBitmap.Width + j + ] == ||
grayValues[(i + ) * curBitmap.Width + j - ] == ||
grayValues[(i + ) * curBitmap.Width + j - ] == ||
grayValues[(i + ) * curBitmap.Width + j] == ||
grayValues[(i + ) * curBitmap.Width + j + ] == ||
grayValues[(i + ) * curBitmap.Width + j + ] == ||
grayValues[(i + ) * curBitmap.Width + j - ] == ||
grayValues[(i + ) * curBitmap.Width + j - ] == ||
grayValues[(i + ) * curBitmap.Width + j] == ||
grayValues[(i + ) * curBitmap.Width + j + ] == ||
grayValues[(i + ) * curBitmap.Width + j + ] == )
{
tempArray[i * curBitmap.Width + j] = ;
} }
}
break;
default:
MessageBox.Show("错误的结构元素!");
break;
} grayValues = (byte[])tempArray.Clone(); System.Runtime.InteropServices.Marshal.Copy(grayValues, , ptr, bytes);
curBitmap.UnlockBits(bmpData);
} Invalidate();
}
}
#region 关于图像尺寸的说明
//本代码只能处理8位深度的512*512图像。可自行修改,例如修改3位水平方向结构元素代码:
//01修改成如下代码即可处理任意尺寸的8位深度的图像
//int bytes = bmpData.Stride * curBitmap.Height;
//for (int i = 0; i < curBitmap.Height; i++)
//{
// for (int j = 1; j < curBitmap.Width - 1; j++)
// {
// if (grayValues[i * bmpData.Stride + j] == 0 ||
// grayValues[i * bmpData.Stride + j + 3] == 0 ||
// grayValues[i * bmpData.Stride + j - 1] == 0)
// {
// tempArray[i * bmpData.Stride + j] = 0;
// tempArray[i * bmpData.Stride + j + 1] = 0;
// tempArray[i * bmpData.Stride + j + 2] = 0;
// }
// }
//}
//02修改成如下代码即可处理任意尺寸的24位深度的图像
//int bytes = bmpData.Stride * curBitmap.Height;
//for (int i = 0; i < curBitmap.Height; i++)
//{
// for (int j = 4; j < curBitmap.Width * 3 - 3; j += 3)
// {
// if (grayValues[i * bmpData.Stride + j] == 0 ||
// grayValues[i * bmpData.Stride + j + 3] == 0 ||
// grayValues[i * bmpData.Stride + j - 1] == 0)
// {
// tempArray[i * bmpData.Stride + j] = 0;
// tempArray[i * bmpData.Stride + j + 1] = 0;
// tempArray[i * bmpData.Stride + j + 2] = 0;
// }
// }
//}
#endregion
c#数字图像处理(十二)图像的腐蚀与膨胀的更多相关文章
- Win8MetroC#数字图像处理--2.2图像二值化函数
原文:Win8MetroC#数字图像处理--2.2图像二值化函数 [函数代码] /// <summary> /// Binary process. /// </summary> ...
- Win8 Metro(C#)数字图像处理--3.2图像方差计算
原文:Win8 Metro(C#)数字图像处理--3.2图像方差计算 /// <summary> /// /// </summary>Variance computing. / ...
- Win8 Metro(C#)数字图像处理--3.3图像直方图计算
原文:Win8 Metro(C#)数字图像处理--3.3图像直方图计算 /// <summary> /// Get the array of histrgram. /// </sum ...
- Win8 Metro(C#)数字图像处理--3.4图像信息熵计算
原文:Win8 Metro(C#)数字图像处理--3.4图像信息熵计算 [函数代码] /// <summary> /// Entropy of one image. /// </su ...
- Win8 Metro(C#)数字图像处理--3.5图像形心计算
原文:Win8 Metro(C#)数字图像处理--3.5图像形心计算 /// <summary> /// Get the center of the object in an image. ...
- Win8 Metro(C#)数字图像处理--3.1图像均值计算
原文:Win8 Metro(C#)数字图像处理--3.1图像均值计算 /// <summary> /// Mean value computing. /// </summary> ...
- Win8 Metro(C#)数字图像处理--2.74图像凸包计算
原文:Win8 Metro(C#)数字图像处理--2.74图像凸包计算 /// <summary> /// Convex Hull compute. /// </summary> ...
- Win8 Metro(C#)数字图像处理--2.68图像最小值滤波器
原文:Win8 Metro(C#)数字图像处理--2.68图像最小值滤波器 /// <summary> /// Min value filter. /// </summary> ...
- Win8 Metro(C#)数字图像处理--2.52图像K均值聚类
原文:Win8 Metro(C#)数字图像处理--2.52图像K均值聚类 [函数名称] 图像KMeans聚类 KMeansCluster(WriteableBitmap src,i ...
- Win8 Metro(C#)数字图像处理--2.45图像雾化效果算法
原文:Win8 Metro(C#)数字图像处理--2.45图像雾化效果算法 [函数名称] 图像雾化 AtomizationProcess(WriteableBitmap src,i ...
随机推荐
- dotnet 通过 WMI 获取系统信息
本文告诉大家如何通过 WMI 获取系统信息 通过 Win32_OperatingSystem 可以获取系统信息 var mc = "Win32_OperatingSystem"; ...
- C++Review3_关于C++各种概念的串联与梳理
经过前面两个Review,对代码复用,类的继承概念有了进一步理解. 这里再做一次复盘,把其他概念也串联起来构成一个知识框架. 首先是类和对象的概念.对象指的是特征与技能的结合体,面向对象编程思想的好处 ...
- 一些实战中总结的 javascript 开发经验
Javascript 的很多扩展的特性是的它变得更加的犀利, 同时也给予程序员机会创建更漂亮并且更让用户喜欢的网站. 尽管很多的开发人员都乐于颂扬 javascript,但是仍旧有人看到它的阴暗面. ...
- python类中的一些神奇方法
__str__:用于在print(对象)时,直接打印__str__的返回值 class Animal: def __init__(self, name): self.name = name def _ ...
- Python之eval和exec
eval可以执行字符串形式的表达式 In [1]: eval("1 + 2 + 3") Out[1]: 6 In [2]: eval("a + 1", {&qu ...
- 简易数据分析 15 | Web Scraper 高级用法——CSS 选择器的使用
这是简易数据分析系列的第 15 篇文章. 年末事情比较忙,很久不更新了,后台一直有读者催更,我看了一些读者给我的私信,发现一些通用的问题,所以单独写篇文章,介绍一些 Web Scraper 的进阶用法 ...
- jquery中获取当前选中行数据的方法
$("table tr").click(function() { var td = $(this).find("td");// 找到td元素 var lo_id ...
- JavaScript中浅拷贝和深拷贝的区别
JavaScript数据类型 基础数据类型:保存在栈内存中的简单数据段 ,有undefined,boolean,number,string,null 引用数据类型:Array,object,Funct ...
- spring注解之@Import注解的三种使用方式
目录 1.@Import注解须知 2.@Import的三种用法 3.@Import注解的三种使用方式总结 @ 1.@Import注解须知 1.@Import只能用在类上 ,@Import通过快速导入的 ...
- Linux中 ps命令的参数讲解
Linux命令ps: (Process Status的缩写)该命令常常用来用来列出系统中当前运行的进程.ps是显示瞬间进程的状态,并不动态连续:如果想对进程进行实时监控应该用top命令 -a 显示所有 ...