planning algorithms chapter 2
planning algorithms chapter 2 :Discrete Planning
离散可行规划导论
问题定义
在离散规划中,状态是“可数”的,有限的。
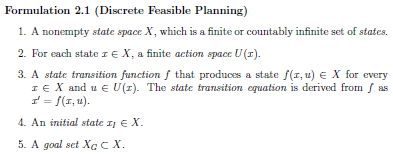
离散可行规划:
- 非空状态空间 X
- 对于每个状态 x,存在一个有限的动作空间 U(x)
- 对于每个状态和动作空间,存在状态转移方程,产生一个新的状态
- 一个初始状态 xi
- 一个目标集 Xg
为了方便表达离散可行规划的定义,通常采用有向状态转移图来表示,图上的顶点集合表示状态空间 X,只有当两顶点之间可状态转移时,图上两顶点之间的有向边才存在。初始状态和目标集可以表示为图上特别指定的顶点。
离散规划的例子
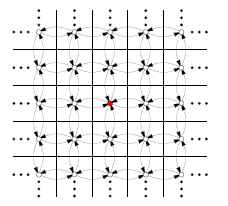
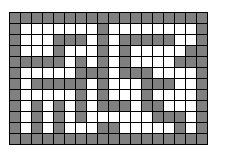
- 2D 网格上移动(“迷宫”)
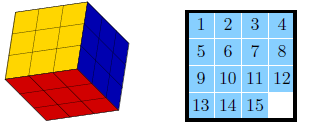
- 魔方拼图
图搜索算法
前向搜索算法
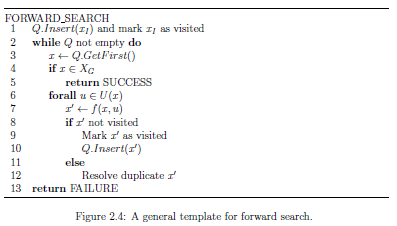
上图显示了通用图搜索算法模板,其中有几点需要注意:Q 内部如何排序,如何判断状态属于目标状态,如何得到计划(动作序列),如何判断该状态是否已经访问过,是否需要更新状态代价值(如在Dijkstra 和 A* 算法)
几种前向搜索算法,区别在于定义了Q 这个优先级队列内部不同的排序方式
- 广度优先:FIFO
- 深度优先:LIFO
- Dijkstra :一种图单源最短路径搜索算法,一种特殊的动态规划形式
在Dijkstra中,图上每条边附带一个代价(l(x, u) >= 0),Q 内部是按照从初始状态到达该状态的累计代价(C(x),cost-to-come)排序。cost-to-come 在搜索过程中通过DP方式来增量计算(C(x‘) = C(x) + l(x, u), 代表最优)。
Dijkstra 可以保证一旦某个状态被访问,则该状态的 cost-to-come一定是最优的。Dijkstra 内部 Q 实现采用的 Fibonacci heap 这种数据结构,可以实现在常数时间内判断某个状态是否被访问过。 - A-star :基于Dijkstra进行扩展,引入启发项值(G(x),cost-to-go),当G(x) = 0 时, A-star 退化成Dijkstra,Q 内部是按照从初始状态到达目标状态的预估最优代价( C(x’) + G(x‘)) 进行排序。
- 最佳优先搜索:Q 内部是按照 cost-to-go 排序,一种贪心搜索,不保证最优,但搜索速度快。
- 迭代加深搜索:通过不断增加深度优先搜索深度的一种搜索,将深度优先搜索转换为一种系统性搜索方式(能够访问可到达的所有状态)。
迭代加深搜索相比 BFS 使用更少的内存,迭代加深搜索结合 A-star 的思想,形成了 IDA* 算法,在每次迭代过程中,最大深度步长为C(x’) + G(x‘)。
其他搜索算法
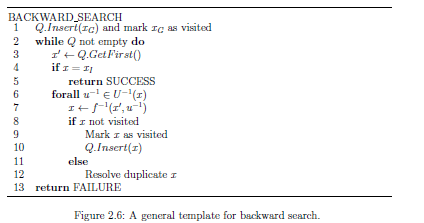
- 反向搜索算法
- 双向搜索算法
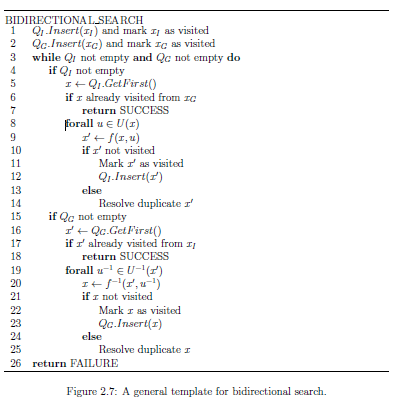
当两棵搜索树相遇时,搜索结束,返回成功。如果其中任一搜索树的优先级队列为空, 且两颗树未相遇,则搜索结束,返回失败。
搜索算法的统一视角
上述所有的搜索算法遵循以下一些共同的模式:
- 初始
搜索开始时,搜索图 G(V,E)中 E为空集,V只包含初始状态 - 选择顶点
从V中选择一个顶点,这通常是通过维护一个优先级队列实现 - 应用动作
基于V中选择的某个顶点,应用动作后,生成一个新的状态 x = f(x0, u) - 向搜索图中插入有向边
新状态 x 如果不在 V 中,则将 x 插入到 V 中 - 检查解决方案
如果只有一颗搜索树,根据搜索图 G 得到从初始状态到目标状态的路径会比较简单。如果搜索树数量大于 1 颗,复杂度会增加。 - 返回到步骤 2
迭代直到找到一个解决方案。
离散最优规划
最优定长规划
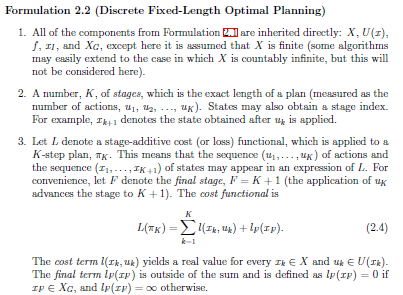
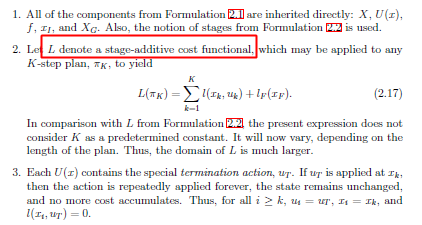
\(L\left ( \pi _{K} \right ) = \sum_{k=1}^{K}l(x_{k},u_{k}) + l_{F}(x_{F})\)
通过引入代价项Lf(xf)这一技巧,将离散可行规划中的约束转换为优化问题代价函数中的一项。
基本思想: 最优规划解决方案的子组成方案也是最优的,于是可以通过动态规划方法解决。在最优定长规划中,采用一种迭代算法,称为 值迭代,它的主要思想是在状态空间中迭代计算最优的 cost-to-go(或 cost-to-come)。Dijkstra’s algorithm 也是 值迭代的一种方式。
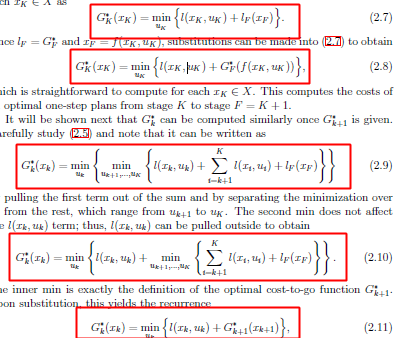
反向值迭代
基本思想: 在状态空间中迭代计算最优的 cost-to-go 代价值。在特殊场景下,该方法退化为 Dijkstra 方法。
符号: $ G_{k}^{ \ast} $ :F 表示最后一步,$ G_{k}^{ \ast} $ 表示从第 k 步到 最后一步(F 步)最佳计划下的累计代价

初始条件: $ G_{F}^{ \ast}\left ( x_{F} \right ) = l_{F}\left ( x_{F} \right ) $
结论:

推导过程:
值迭代过程:
$ G_{F}^{ \ast}\rightarrow G_{K}^{ \ast}\rightarrow G_{K-1}^{ \ast}\cdots G_{k}^{ \ast}\rightarrow G_{k-1}^{ \ast}\rightarrow\cdots G_{2}^{ \ast}\rightarrow G_{1}^{ \ast} $
时间复杂度: $ O\left ( K\left | X \right |\left | U \right | \right ) $
离散最优规划标准定义\(L\left ( \pi _{K} \right ) = \sum_{k=1}^{K}l(x_{k},u_{k}) + l_{F}(x_{F})\),该时间复杂度为 $ O\left | U \right |^K $,通过引入动态规划,极大降低了复杂度。
举例:
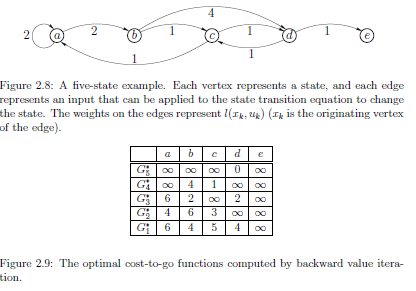
如上图,a 列 $ G_{1}^{ \ast} $ 的值 $G_{1}^{ \ast}\left ( a \right ) $ 代表了 5 步定步长最优规划的累计代价为 6 。那么如何体现动态规划思想降低时间复杂度呢?
当计算 $ G_{4}^{ \ast} $ 的值时,只有 b 和 c 可以只经过 1 步到达 d,再经过1 步到达目标 e,因此只有\(G_{4}^{ \ast}\left ( b \right )\)、\(G_{4}^{ \ast}\left ( c \right )\)为有限值。再计算 \(G_{3}^{ \ast}\) 的值时,只有经过 b 和 c 的路径才可能经过 5 步到达 目标 e,因此缩小了考虑的范围,具体程序表现为选择到达下一顶点的最小累计代价的行为。
那么,得到了最佳cost-to-go的表,如何提取最佳计划(或路径)?
一种解决方案是为每个顶点存储最优 \(G_{n}^{ \ast}\)所对应的行为,因此这样需要的内存复杂度为 \(O(K\left | X \right |)\) 。
正向值迭代
- 为什么需要正向值迭代?正向值和反向值迭代的区别是什么?
反向:
反向值迭代可以同时找到各顶点到目标顶点的最优计划;
反向值迭代需要目标顶点是确定不变的;
正向:
正向值迭代可以用来找到从初始顶点出发到其他各顶点的最优计划;
正向值迭代需要初始顶点是确定不变的;
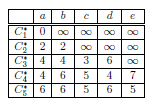
基本思想: 在状态空间中迭代计算最优的 cost-to-come 代价值。
下图为上例,根据正向值迭代得到的最优 cost-to-come 代价值表。
最优不定步长规划
\(L\left ( \pi _{K} \right ) = \sum_{k=1}^{K}l(x_{k},u_{k}) + l_{F}(x_{F})\)
通过引入代价项Lf(xf)这一技巧,将离散可行规划中的约束转换为优化问题代价函数中的一项。
对比最优定长规划问题和最优不定步长规划的区别,主要在于终止条件的设置。
定长问题:

不定步长:允许不同长度的计划

在最优不定步长问题中,从\(x_{I}\)到\(X_{G}\)的两步计划\(\left ( u_{1}, u_{2}\right )\)等效于从\(x_{I}\)到\(X_{G}\)的五步计划\(\left ( u_{1}, u_{2},u_{T},u_{T},u_{T}\right )\),因此最优定长规划中的正(反)向值迭代优化方法都可以扩展用于最优不定步长问题中。
使用逻辑定义离散规划
当状态空间巨大时,对于计算机去解决这样的规划问题会比较困难,基于逻辑的表示形式在定义离散规划问题时比较流行,因为输出的结果是逻辑可解释的,但是由于基于逻辑的表示形式难以泛化,因此在连续空间、感知不确定、多决策的规划问题中,状态空间的表示形式仍然适用。
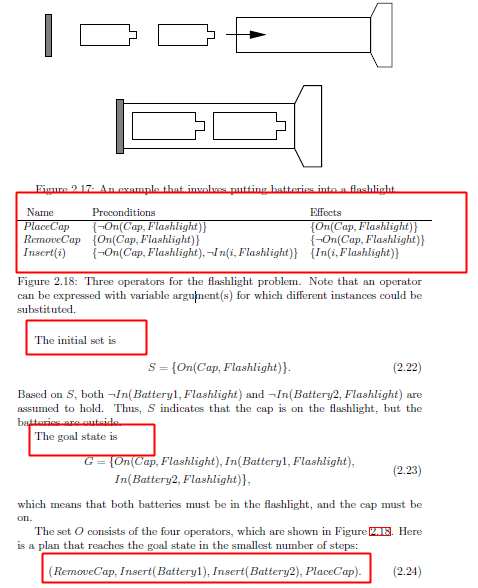
STRIPS-Like 表示法
举例: 放电池到手电筒内
planning algorithms chapter 2的更多相关文章
- planning algorithms chapter 3
chapter 3 几何表示和变换 P.S: 总算到了 motion planning 部分了 几何建模 几何建模主要有两类方法:边界表示法和实体表示法. 环境模型可以是二维或三维,实体主要包括障碍物 ...
- planning algorithms chapter 1
chapter 1 介绍 什么是规划? 在机器人领域,运动规划和轨迹规划主要用来解决"怎么移动钢琴"的问题,这个问题是如何将钢琴从一个房间移动到另一个房间,并且保证钢琴不和其他事物 ...
- 泡泡一分钟:Automatic Parameter Tuning of Motion Planning Algorithms
Automatic Parameter Tuning of Motion Planning Algorithms 运动规划算法的自动参数整定 Jos´e Cano, Yiming Yang, Brun ...
- Following a Select Statement Through Postgres Internals
This is the third of a series of posts based on a presentation I did at the Barcelona Ruby Conferenc ...
- Github上的1000多本免费电子书重磅来袭!
Github上的1000多本免费电子书重磅来袭! 以前 StackOverFlow 也给出了一个免费电子书列表,现在在Github上可以看到时刻保持更新的列表了. 瞥一眼下面的书籍分类目录,你就能 ...
- Github 的一个免费编程书籍列表
Index Ada Agda Alef Android APL Arduino ASP.NET MVC Assembly Language Non-X86 AutoHotkey Autotools A ...
- Boyer-Moore algorithm
http://www-igm.univ-mlv.fr/~lecroq/string/node14.html Main features performs the comparisons from ri ...
- 字符串匹配--Karp-Rabin算法
主要特征 1.使用hash函数 2.预处理阶段时间复杂度O(m),常量空间 3.查找阶段时间复杂度O(mn) 4.期望运行时间:O(n+m) 本文地址:http://www.cnblogs.com/a ...
- Introduction to Machine Learning
Chapter 1 Introduction 1.1 What Is Machine Learning? To solve a problem on a computer, we need an al ...
随机推荐
- [個人紀錄] windows form , usercontrol design 模式不見
windows form 跟 usercontrol 都變成cs檔 無法點擊進入設計模式 <Compile Include="Form1.cs"/> <Compi ...
- 2019 边锋游戏java面试笔试题 (含面试题解析)
本人5年开发经验.18年年底开始跑路找工作,在互联网寒冬下成功拿到阿里巴巴.今日头条.边锋游戏等公司offer,岗位是Java后端开发,因为发展原因最终选择去了边锋游戏,入职一年时间了,也成为了面 ...
- jQuery---jq操作标签文本(html(),text()),jq操作文档标签(插入,删除,修改),克隆,,jq操作属性,jq操作class属性,jq操作表单value,jq操作css,jq操作盒子(重要),jq操作滚动条
jQuery---jq操作标签文本(html(),text()),jq操作文档标签(插入,删除,修改),克隆,,jq操作属性,jq操作class属性,jq操作表单value,jq操作css,jq操作盒 ...
- 40、js技巧(持续更新。。。)
1.深拷贝对象: const a={name:'aaa',age:11} const b=JSON.parse(JSON.stringify(a)) 2.获取数组极值: let list = [1, ...
- 老生常谈之js深拷贝与浅拷贝
前言 经常会在一些网站或博客看到"深克隆","浅克隆"这两个名词,其实这个很好理解,今天我们就在这里分析一下js深拷贝和浅拷贝. 浅拷贝 我们先以一个例子来说明 ...
- 腕表wacche英语wacche手表
watch As a noun, from Middle English wacche, Etymology As a noun, from Middle English wacche,See bel ...
- python学习之:序列类型 之列表,元组,range
列表 列表是可变序列,通常用于存放同类项目的集合(其中精确的相似程度将根据应用而变化). class list([iterable]) 可以用多种方式构建列表: 使用一对方括号来表示空列表: [ ] ...
- Android Studio 导入 Android 系统模块并编译和调试
FAQ: AS导入系统模块源码,并且能够编译调试,正常查看java doc ???? Android AOSP基础(五)Android Studio调试系统源码的三种方式http://liuwangs ...
- Prometheus学习笔记(7)PromQL玩法入门
目录 1.什么是PromQL??? 2.如何查询??? 1.什么是PromQL??? PromQL是Prometheus内置的数据查询语言,其提供对时间序列数据丰富的查询,聚合以及逻辑运算能力的支持. ...
- Django 之组合搜索
现在很多网站都会有这样的组合搜索功能,其实质是几个模型之间组合对数据库进行查询,并将结果显示到页面上. 每一行都是一个模型,模型之间有着连表关系(一对多.多对多等) 模型设计 总共四个模型:分别为方向 ...