【文献阅读】Nonlinear controller design of a ship autopilot
(1)文章工作
The main goal here is to design a proper and efficient controller for a ship autopilot based on the sliding mode control method. A hydrodynamic numerical model of CyberShip II including wave effects is applied to simulate the ship autopilot system by using time domain analysis.
本文的主要目标是设计一种合适而有效的船舶自动驾驶仪控制器,利用含波效应的水动力数值模型模拟了CyberShip II船舶自动驾驶系统。
(2)PD控制器
A conventional autopilot system used for controlling the ship motion is a PD controller with constant parameters values. These controllers can work properly in precisely defined operating conditions, but the quality of their work is worse when these conditions change. Ship dynamic characteristics can change as a consequence of changes of the ship speed, load, and external disturbances such as waves, wind, and/or sea currents. In many cases manual tuning of control parameters is necessary.
一种用于控制船舶运动的传统自动驾驶系统是一种参数值不变的PD控制器。这些控制器可以在精确定义的操作条件下正常工作,但当这些条件发生变化时,它们的工作质量会更差。船舶的动态特性可以随着船舶的速度、负载和诸如波浪、风和/或海流等外部干扰的变化而发生变化。在许多情况下,手动调整控制参数是必要的。
Therefore a lot of research activities have been oriented to improving the quality of operation of these controllers using adaptive mechanisms which automatically change ship model parameters, depending on operating conditions.
因此,大量的研究活动都是为了提高这些控制器的运行质量,使用自适应机制,根据操作条件自动改变船舶模型的参数。
The controller which, due to its simplicity, is most frequently used in autopilot systems is the PD controller. It controls the rudder blade deflection depending on the values of the heading error and the yaw rate. The PD controller is described by the following formula:
由于其简单性,在自动驾驶系统中最常用的控制器是PD控制器。它根据航向误差和偏航率的值来控制方向舵叶片的偏转。PD控制器的描述公式如下:

where KP and KD are controller settings, ψd and ψ are the desired and current ship headings, respectively, r = dψ/dt is the yaw rate of the ship, and δz is the commanded rudder blade deflection.
其中KP和KD为控制器设置,ψd和ψ为当前航向,r=dψ/dt为船舶偏航率,δz为指令舵叶片偏转。
(3)评价函数
The cost function took into account the ship course error and rudder blade deflection, and was used for evaluating the quality of the steering action of the controllers.
成本函数考虑了船舶航向误差和方向舵叶片偏转,并用于评估控制器的转向动作的质量。
(4)控制器参数
For the nonlinear part of the sliding mode controller (43), the following values were assumed: ηh = 10, φh = 0.3
对于滑模控制器(43)的非线性部分,假设了以下值:ηh=10,φh=0.3,
while for the PD controller (20), the assumed gains were KP = 2 and KD = 50
而对于PD控制器(20),假设的增益为 KP=2 和 KD=50 。

The parameters in the reference model (44) were ωn = 0.1, ζ = 0.85.
参考模型(44)中的参数分别为ωn=0.1,ζ=0.85。
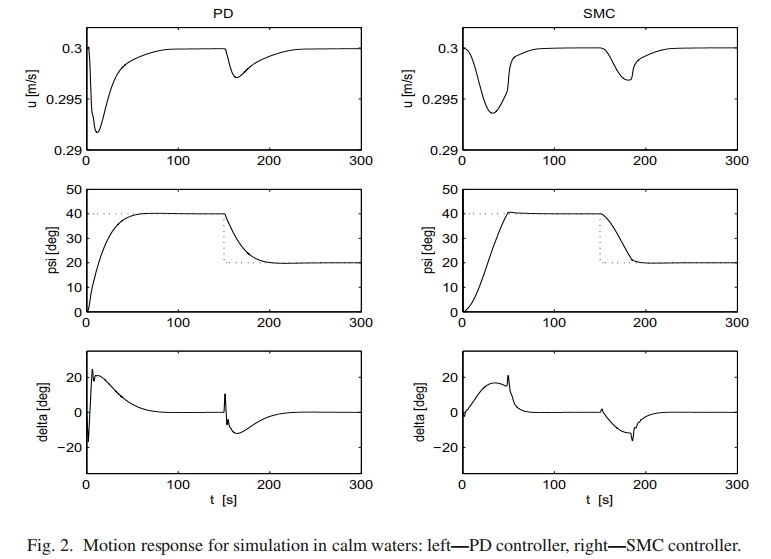
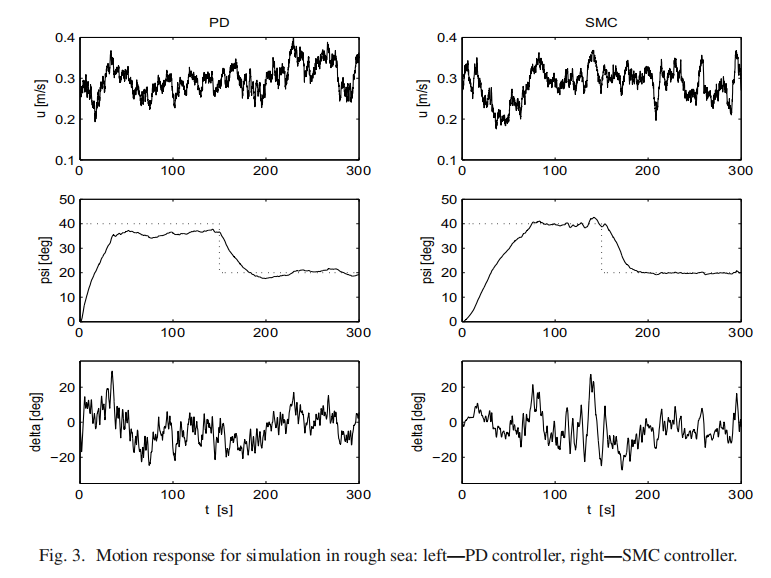
(5)结果对比
【文献阅读】Nonlinear controller design of a ship autopilot的更多相关文章
- 阅读DMA Controller Core 官方手册
阅读DMA Controller Core 官方手册 DMA控制器框架图 怎样去设定一个DMA控制器 实例化DMA控制器 参数配置界面如下图所示: 对于width of the DMA length ...
- 文献阅读笔记——group sparsity and geometry constrained dictionary
周五实验室有同学报告了ICCV2013的一篇论文group sparsity and geometry constrained dictionary learning for action recog ...
- Vivado HLS初识---阅读《vivado design suite tutorial-high-level synthesis》(6)
Vivado HLS初识---阅读<vivado design suite tutorial-high-level synthesis>(6) 1.创建工程与开启GUI 2.调试 查看关于 ...
- Vivado HLS初识---阅读《vivado design suite tutorial-high-level synthesis》(5)
Vivado HLS初识---阅读<vivado design suite tutorial-high-level synthesis>(5) 1.创建工程 启动vidado HLS co ...
- Vivado HLS初识---阅读《vivado design suite tutorial-high-level synthesis》(4)
Vivado HLS初识---阅读<vivado design suite tutorial-high-level synthesis>(4) 1.老样子,首先运行tcl脚本建工程: Vi ...
- Vivado HLS初识---阅读《vivado design suite tutorial-high-level synthesis》(3)
Vivado HLS初识---阅读<vivado design suite tutorial-high-level synthesis>(3) 优化lab1 1.创建工程,开启HLS 运行 ...
- Vivado HLS初识---阅读《vivado design suite tutorial-high-level synthesis》(2)
Vivado HLS初识---阅读<vivado design suite tutorial-high-level synthesis>(2) 1.实验目的 2.启动命令行 将命令行切换 ...
- Vivado HLS初识---阅读《vivado design suite tutorial-high-level synthesis》
Vivado HLS初识---阅读<vivado design suite tutorial-high-level synthesis> 1.启动 2.创建工程 3.添加源文件 4.添加测 ...
- 文献阅读 | The single-cell transcriptional landscape of mammalian organogenesis | 器官形成 | 单细胞转录组
The single-cell transcriptional landscape of mammalian organogenesis 老板已经提了无数遍的文章,确实很nb,这个工作是之前我们无法想 ...
- AutoML文献阅读
逐步会更新阅读过的AutoML文献(其实是NAS),以及自己的一些思考 Progressive Neural Architecture Search,2018ECCV的文章: 目的是:Speed up ...
随机推荐
- 微信小程序的全局弹窗以及全局实例
全局组件 微信小程序组件关系中,父组件使用子组件需要在父组件index.json中引入子组件,然后在父组件页面中使用,这种组件的对应状态是一对一的,一个组件对应一个页面.如果有一个全局弹窗(登录),那 ...
- CF863E - Turn Off The TV
题意:对于若干个闭区间 \([l_i,r_i]\),它们构成了一个集合 \(\bigcup_{i\le n}{[l_i,r_i]}\),求一个 \(k\),使得 \(\bigcup_{i\le n}{ ...
- 线性表的顺序存储C++代码
我学习顺序表时找不到相关的代码,以及我不清楚写一个线性表需要的知识,当我写出来可以使用的线性表我就把这些内容贴了出来. 前置知识点:结构体,常量指针,new和delete 顺序表的特点: 需要一片 ...
- mui、拍照、个推推送消息【问题链接】
HTML5 Plus 拍照或者相册选择图片上传 HBuilder webApp开发(四)相册/拍照-图片上传 HTML5+ API 个推推送, APP是用Webview内嵌WEB程序,个推角标如何实现 ...
- UISelector
1.UiSelector的基本方法 UiSelector对象可以理解为一种条件对象,描述的是一种条件,可以配合UiObject使用得到某个符合条件的控件对象. 所有的方法都是public的,且都返回U ...
- js中常用Math对象
js中常用Math对象 Math.round()四舍五入 Math.ceil() ->ceil 天花板--->向上取整 Math.floor() 向下取整 Math.floor(-11.1 ...
- 微信开发获取code的时候总是提示 10003 redirect_uri域名与后台配置不一致
填写的地址不能加 http://
- js 字符串中提取ip地址
方法1: var reg = new RegExp(/\d{1,3}\.\d{1,3}\.\d{1,3}\.\d{1,3}/);var str = 'http://172.38.172.10:8000 ...
- 内网Linux下安装Nginx1.23,添加stream模块实现tcp/udp代理转发
环境:centos7.6 ngx_stream_core_module 这个模块在1.9.0版本后将被启用.但是并不会默认安装,需要在编译时通过指定 --with-stream 参数来激活这个模块,w ...
- shm
进程间共享内存访问及读写 目录 进程间共享内存访问及读写 1. 进程间共享内存相关linux_C函数 2. 进程间共享内存基本流程 3. demo code 1. 进程间共享内存相关linux_C函数 ...