TX2Ubuntu16.04上安装 kinectV2
本文参考 https://www.ncnynl.com/archives/201706/1780.html
参考 https://blog.csdn.net/qq_33835307/article/details/81272377
在TX2上整合kinect v2深度相机,由于TX2默认是USB2.0端口,kinect v2深度相机是USB3.0接口,所以在使用前需要把USB2.0的端口改为USB3.0的端口
1、输入:
sudo gedit /boot/extlinux/extlinux.conf
编辑文件将下面代码做更改
usb_port_owner_info=
更改为
usb_port_owner_info=2
2、禁止USB自动挂起
在usb_port_owner_info=2后空格加上
usbcore.autosuspend=-1
3、安装libfreenect2
1) 下载源码:
cd ~
git clone https://github.com/xlz/libfreenect2
cd libfreenect2
2) 下载依赖
cd depends
./download_debs_trusty.shsudo apt-get install build-essential cmake pkg-config
3)
sudo dpkg -i debs/libusb*deb
4)
sudo apt-get install libturbojpeg libjpeg-turbo8-dev
5)安装 OpenGL
sudo dpkg -i debs/libglfw3*deb
sudo apt-get install -f
sudo apt-get install libgl1-mesa-dri-lts-vivid
6)编译:
cd ..
mkdir build
cd build
cmake .. -DCMAKE_INSTALL_PREFIX=$HOME/freenect2
make
make install
4、
sudo cp ../platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/
重新插上Kinect2重启TX2就可以了。
在终端输入:
libfreenect2/build//bin/Protonect
就可以看到相机的效果图了

安装iai-kinect2
利用命令行从Github上面下载工程源码到工作空间内src文件夹内:
1、下载编译
mkdir -p ~/kinect2_ws/src
cd ~/kinect2_ws/src
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/kinect2_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
编译结束, 一切OK的话, 会看到如下提示:
还需添加source对应的目录
2、
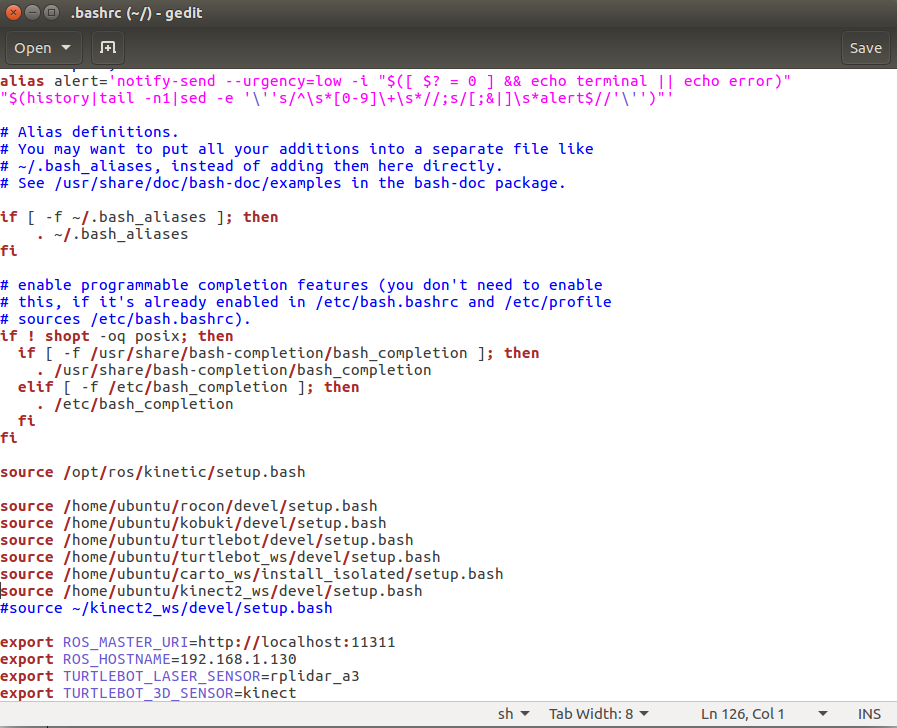
gedit ~/.bashrc
3、添加自己工作空间
source /home/ubuntu/kinect2_ws/devel/setup.bash
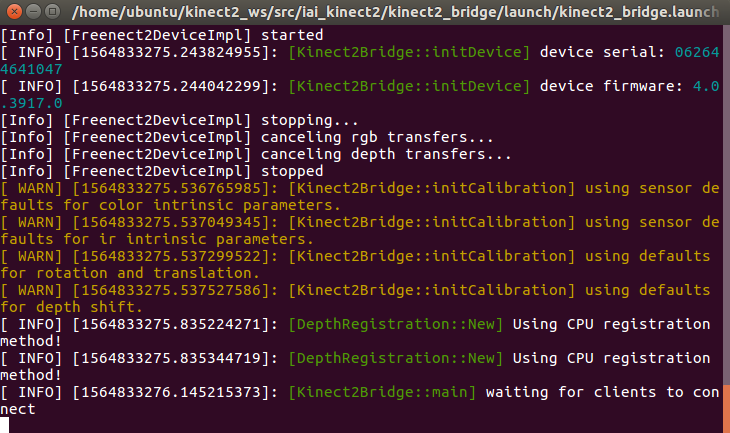
在终端输入:
roslaunch kinect2_bridge kinect2_bridge.launch
在ROS内启动kinect2
在新的终端输入
rosrun kinect2_viewer kinect2_viewer sd cloud
可以开启一个Viewer查看cloud数据
非常感谢各论坛、网站提供的资料。
TX2Ubuntu16.04上安装 kinectV2的更多相关文章
- [译]How to Install Node.js on Ubuntu 14.04 如何在ubuntu14.04上安装node.js
原文链接为 http://www.hostingadvice.com/how-to/install-nodejs-ubuntu-14-04/ 由作者Jacob Nicholson 发表于October ...
- 翻译:在Ubuntu 14.04上安装FTP服务器的方法
说明: 1.原文地址:http://www.krizna.com/ubuntu/setup-ftp-server-on-ubuntu-14-04-vsftpd/ 2.今天要做一个网络日志的迁移程序,搬 ...
- 如何在 Ubuntu Linux 16.04上安装开源的 Discourse 论坛
导读 Discourse 是一个开源的论坛,它可以以邮件列表.聊天室或者论坛等多种形式工作.它是一个广受欢迎的现代的论坛工具.在服务端,它使用 Ruby on Rails 和 Postgres 搭建, ...
- 在vmware 6.5+ubuntu12.04上安装VMware tools出现问题的分析
笔者已经写了一篇关于安装"VMware Tools",以实现文件共享的文章,那篇文章对于你实现共享操作是足够了, 所以,倘若你赶时间不如直接去在虚拟机的linux中利用VMware ...
- 如何在Ubuntu 18.04上安装Pip
一.简介: Pip是一个软件包管理系统,它简化了用Python编写的软件包(如Python包索引(PyPI)中的软件包)的安装和管理. 在Ubuntu 18.04上缺省没有安装Pip,但安装非常简单. ...
- 在ubuntu18.04上安装EOS
在ubuntu18.04上安装EOS 在ubuntu18.04上安装EOS的目的: 把交易所的eos转到eos主网,防止交易所跑路或者交易所被黑客攻击 在不联网的安全环境下,用eos官方的命令行工具, ...
- Ubuntu 12.04上安装R语言
Ubuntu 12.04上安装R语言 作者:凯鲁嘎吉 - 博客园 http://www.cnblogs.com/kailugaji/ R的安装 sudo gedit /etc/apt/sources. ...
- Ubuntu 12.04上安装HBase并运行
Ubuntu 12.04上安装HBase并运行 作者:凯鲁嘎吉 - 博客园 http://www.cnblogs.com/kailugaji/ 一.HBase的安装 在官网上下载HBase-1.1.2 ...
- Ubuntu 12.04上安装MySQL并运行
Ubuntu 12.04上安装MySQL并运行 作者:凯鲁嘎吉 - 博客园 http://www.cnblogs.com/kailugaji/ 安装MySQL数据库 sudo apt-get upda ...
随机推荐
- Windows 10中使用VirtualBox
新版Windows 10或者安装了新的更新以后,VirtualBox虚拟机就不能用了. 原因是WIndows10里面有个叫Virtualization-base security的安全机制打开了. 关 ...
- 关于Business Terminology,你需要了解的三件事
严格意义上来说,商科论文形式的考核,主观因素会有很大的影响.这也是为什么雅思考试中,口语和写作的分数很少有出现满分的原因.除开硬性标准外(如行文逻辑,扣题准确度以及文献资料准确引用等),商科高分论文都 ...
- C# winform中ListView用法
this.listView1.GridLines = true; //显示表格线 this.listView1.View = View.Details;//显示表格细节 this.listView1. ...
- Spark 调优
资源调优 (1). 在部署 spark 集群中指定资源分配的默认参数 在 spark 安装包的 conf 下的 spark-env.sh SPARK_WORKER_CORES SPARK_WORKER ...
- 每天一点点之vue框架开发 - 如何在一个页面调用另一个同级页面的方法
使用场景: 页面分为header.home.footer三部分,需要在home中调用header中的方法,这两个没有相互引入 官方给出方法: api传送门 在项目中实现: 1.首先同一个vue实例来调 ...
- 【LeetCode】解码方法
[问题] 一条包含字母 A-Z 的消息通过以下方式进行了编码:'A' -> 1'B' -> 2…'Z' -> 26给定一个只包含数字的非空字符串,请计算解码方法的总数. 示例 : 输 ...
- comm
comm [- 123 ] file1 file2 说明:该命令是对两个已经排好序的文件进行比较.其中file1和file2是已排序的文件.comm读取这两个文件,然后生成三列输出:仅在file1中出 ...
- POJ 1422 DAG最小路径覆盖
求无向图中能覆盖每个点的最小覆盖数 单独的点也算一条路径 这个还是可以扯到最大匹配数来,原因跟上面的最大独立集一样,如果某个二分图(注意不是DAG上的)的边是最大匹配边,那说明只要取两个端点只要一条边 ...
- Oracle 中多个字段显示成一列
SELECT COALESCE(A,B,C,'NA') FROM XXXXX --判断A若为空则取B,B为空这取C,C为空则取默认值'NA'
- 【Tensorflow】(tf.Graph)和(tf.session)
图(tf.Graph):计算图,主要用于构建网络,本身不进行任何实际的计算. 会话(tf.session):会话,主要用于执行网络.所有关于神经网络的计算都在这里进行,它执行的依据是计算图或者计算图的 ...