三步就能在OpenHarmony中实现车牌识别
介绍
本车牌识别项目是基于开源项目 EasyPR(Easy to do Plate Recognition)实现。EasyPR 是一个开源的中文车牌识别系统,基于 OpenCV 开源库开发。
本项目使用润和 HiSpark Taurus AI Camera(Hi3516DV300) 摄像头开发板套件(以下简称 Hi3516)实现拍照车牌并显示识别结果。采用的系统是 OpenAtom OpenHarmony (简称“OpenHarmony”) 3.1 Release 小型系统。
首先将 Hi3516 中的摄像头对准车牌,其距离约为 60cm~70cm 如下所示:
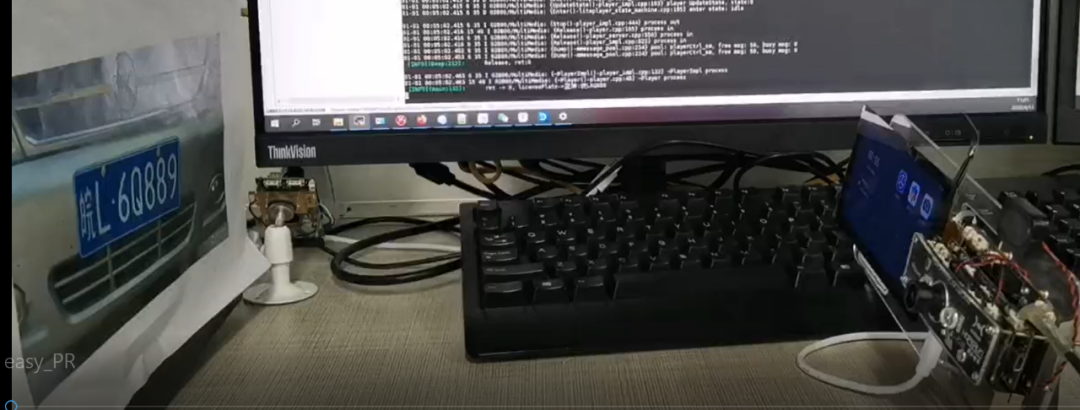
运行程序后按下 1 拍照、按 2 输出识别结果如下所示:

开发流程
本车牌识别项目使用 OpenHarmony 中的媒体子系统实现。代码基于停车场景下的本地车牌识别。进行讲解,其代码结构如下:
三方库移植
EasyPR 实现是基于 OpenCV 实现,因此实现 EasyPR 首先得移植 OpenCV。移植的方式采用 Gn 调用 Shell 脚本,Shell 脚本调用 Makefile 实现。
├── BUILD.gn
├── include
│ ├── camera.h // 摄像头定义
│ ├── local_net_communication.h // 设备协同主要功能定义
│ ├── local_net_def.h // 设备协同打印日志
│ ├── local_net_dlist.h // 设备协同设备列表定义
│ ├── local_net_message.h // 设备协同传输消息定义
│ ├── local_net_udp.h // 设备协同udp协议定义
│ ├── local_net_utils.h // 设备协同通用工具定义
│ ├── log.h // 打印日志定义
│ └── wpa_work.h // wifi设置定义
└── src
├── base64.cpp // 图片转base64格式功能代码
├── camera.cpp // 摄像头实现
├── local_net_communication.c // 设备协同主要功能实现
├── local_net_dlist.c // 设备协同设备列表实现
├── local_net_message.c // 设备协同传输消息实现
├── local_net_udp.c // 设备协同udp协议实现
├── local_net_utils.c // 设备协同通用工具实现
├── main.cpp // 主程序
└── wpa_work.c // wifi设置实现
下面介绍移植的大致流程,具体细节可参考小型系统上运行开源项目车牌识别及移植 opencv 库。
移植OpenCV
下载源码
获取源码将 OpenCV 库源码放在 OpenHarmony 根目录下的 third_party 下:
生成Makefile
在 OpenCV 源码根目录新建 build 目录生成 Makefile 文件:
使用 cmake-gui 来配置编译环境:
cd build
make-gui ..
显示的 UI 界面如下图:
点击 Configure 进行配置,选择第四个选项进行配置,如下图:
配置工具链:
点击 Generate 生成 Makefile。
创建 Shell 脚本
在 OpenCV 源码根目录新增 build_opencv.sh:
touch build_opencv.sh
chmod 777 build_opencv.sh
vim build_opencv.sh
##添加如下内容
#!/bin/sh
processor=`cat /proc/cpuinfo|grep processor | sort -u | wc -l`
cd build
make -j$processor
cp lib/* $1/libs/
创建Gn文件
在 OpenCV 源码根目录新增 BUILD.gn 将 OpenCV 库加入编译构建:
移植EasyPR
下载源码
获取源码 EasyPR 库源码放在源码根目录下的 third_party 下:
生成Makefile
在 EasyPr 源码根目录新建 build 目录:
mkdir build
cd build
cmake-gui ..
显示的 UI 界面如下图:
点击 Configure 进行配置,选择第四个选项进行配置,如下图:
配置工具链:
点击 Generate 生成 Makefile。
创建Shell脚本
在 EasyPR 源码根目录新增 build_easypr.sh:
创建Gn文件
在 EasyPR 源码根目录新增 BUILD.gn 加入至编译构建:
vim BUILD.gn #BUILD.gn中添加如下内容
import("//build/lite/config/component/lite_component.gni")
import("//build/lite/ndk/ndk.gni") root_build = rebase_path(root_build_dir) build_ext_component("easypr_lib") {
command = "sh build_easypr.sh $root_build"
exec_path = "$root_build/../../../third_party/EasyPR"
} lite_component("easypr") {
deps = [
"//third_party/opencv:opencv",
":easypr_lib"
]
features = []
}
最终 OpenCV 与 EasyPR 在 third_party 目录如下图所示:

在 OpenHarmony 实现 EasyPR 需要主要分为如下三步:
1. GN 构建,将 EasyPR 加入编译构建;
2. 拍照,调用 OpenHarmony 拍照接口,拍摄车牌;
3. EasyPR 本地识别,调用 EasyPR 识别车牌接口并返回识别结果。
GN构建
GN 构建中包含了 EasyPR 的头文件路径 、链接 EasyPR 动态库、编译依赖 EasyPR。如下所示:

拍照
拍照功能是基于官方文档拍照开发指导开发的,其 demo 样例在如下目录:

在停车场景中二维码识别与车牌识别共用同一份拍照代码 ,为提高二维码识别率在拍照初始化时须将分辨率设置为 1280*720。该改动在进行车牌识别时不会影响 ,初始化拍照代码如下图:
设置照片保存路径在文件 camera.h 下:
因为在停车场景中二维码扫码与车牌识别都会调用拍照接口,因此使用 s_runAi 作区分:
int main(int argc,char **argv)
{
int ret;
char licensePlate[32] = {0};
char input;
InitCamera();
PlateInit();
while(cin >> input) {
switch (input) {
case '1':
RunAICamera(); // 拍照
break;
case '2':
memset(licensePlate, 0, sizeof(licensePlate));
ret = GetPlateString(IMG_PATH, licensePlate); // 识别车牌
SAMPLE_INFO("ret -> %d, licensePlate->%s", ret, licensePlate);
break;
case 's':
PlateDeinit();
ExitCamera();
return 0;
default:
SAMPLE_ERROR("input Error");
break;
}
}
return 0;
}

进行拍照后会进入拍照数据处理,当 s_runAi 为 false 说明是二维码识别,直接调用二维码识别接口即可。当 s_runAi 为 true 时须将拍照的数据保存为图片:

将拍照数据以图片保存路径为“/sdcard/CaptureAi.jpg” 。
EasyPR本地识别
编写主程序 main.cpp 设置程序功能为按 1 拍照、按 2 显示结果 :
编译烧录
前文大致概括了 OpenCV 和 EasyPR 的移植步骤,更详细的关于环境搭建、烧录以及项目源码构建的步骤,请查看参考文章本地车牌识别。
总结
编写车牌识别库对外接口,相关接口使用可以参考作者文章介绍;本文章的源码参考本地车牌识别。丰富多样的 OpenHarmony 开发样例离不开广大合作伙伴和开发者的贡献,如果你也想把自己开发的样例分享出来,欢迎把样例提交到 OpenHarmony 知识体系 SIG 仓来,共建开发样例请参考如何共建开发样例。
车牌识别器(OpenCV版本)
车牌识别器
https://gitee.com/openharmony-sig/knowledge_demo_temp/blob/master/docs/GreyWolf_EasyPR/readme.md
拍照开发指导
作者文章列表
https://gitee.com/link?target=https%3A%2F%2Fwww.cnblogs.com%2Fsubconscious%2Fp%2F3979988.html
源码参考
构建开发样例
https://gitee.com/openharmony-sig/knowledge/blob/master/docs/co-construct_demos/README_zh.md

三步就能在OpenHarmony中实现车牌识别的更多相关文章
- 三步解决EntityFramework Code First中的MissingMethodException错误
在数据库初始化时运行OnModelCreating的方法中,有时会抛出MissingMethodException异常. 以下三步可解决大部份的出错场景: 在程序包管理器控制台中运行:Uninstal ...
- 三步轻松搞定delphi中CXGRID手动添加复表头(多行表头,报表头)
网上有代码动态生成cxgrid多行表头的源码,地址为:http://mycreature.blog.163.com/blog/static/556317200772524226400/ 如果要手动设计 ...
- Android 中 OkHttp 三步实现生命周期绑定
简介 OkHttps 是 OkHttp 增强版的超轻量封装包. 和 Retrofit 相比,它更加轻量(只有 59Kb),是 Retrofit (124Kb)的一半,而且更加的开箱即用,API 更加自 ...
- Membership三步曲之进阶篇 - 深入剖析Provider Model
Membership 三步曲之进阶篇 - 深入剖析Provider Model 本文的目标是让每一个人都知道Provider Model 是什么,并且能灵活的在自己的项目中使用它. Membershi ...
- Membership三步曲之入门篇 - Membership基础示例
Membership 三步曲之入门篇 - Membership基础示例 Membership三步曲之入门篇 - Membership基础示例 Membership三步曲之进阶篇 - 深入剖析Pro ...
- android 三步实现沉浸式 简单到无法想象
今天产品来看进度,说ios状态栏可以改颜色,以前竟然也没注意过,看了美团 ,扣扣的实现, 才注意到.着手开始做.网上借鉴了点 ,各种乱,整理了下 .希望可以帮到大家 . [转载请标明出处] 前提: ...
- 只需三步--轻松反编译Android Apk文件
安卓程序是通过java语言进行编写的,可以很容易进行反编译.很多apk文件被反编译后再二次打包,就成了自己的产品,很是流氓.下面我们来看看如何进行apk的反编译,以及常用的防反编译手段. 一.反编译A ...
- 轻松三步教你配置Oracle—windows环境
最近笔者在学习Oracle的时候,虽然度过了大家所说的安装难题,但是又遇到了一系列的问题,经过多方求教才知道原来是自己仅仅是安装了Oracle,却没有在环境变量中进行相应的配置.笔者也像大家遇到问题时 ...
- 用powershell+excel行列转置三步走
本文重点讲解第一步,手动在excel表中输入公式,或者用powershell自动输入公式. 第二步,用powershell向excel中写入数据,略. 第三步,用powershell从excel中读取 ...
- 只需三步 快速完善网站Sitemap
越来越多的SEOer把优化的重点放在了站内优化上,细心的朋友应该查看一些前辈的robots.txt的时候不难发现,他们的robots中都加 入了一句Sitemap: http://www.dewang ...
随机推荐
- Ubuntu防火墙相关
查看防火墙当前状态 sudo ufw status 开启防火墙 sudo ufw enable 关闭防火墙 sudo ufw disable 查看防火墙版本 sudo ufw version 默认允许 ...
- toml格式配置文件介绍
toml官方wik toml官方文档 此次文档是以v1.0.0为例,进行说明的.如果使用到的版本不同,直接去官方文档中找对应的版本即可. 谈到配置文件,大家都能说出来好几种,比如常见的ini.xml. ...
- 第126篇: 异步函数(async和await)
好家伙,本篇为<JS高级程序设计>第十章"期约与异步函数"学习笔记 ES8 的 async/await 旨在解决利用异步结构组织代码的问题. 为为此增加了两个新关键 ...
- 【Azure APIM】APIM self-host 部署在K8S中,如何更换证书呢?
问题描述 APIM self-host(自建网关)部署在K8S中,如何在本地上传及更换证书呢? 问题解答 如果使用Self-host网关,则不支持使用上传到 APIM的 CA 根证书验证服务器和客户端 ...
- 视觉slam十四讲CH4 ---李群与李代数求导
视觉slam十四讲 ---CH4 李群与李代数求导 李群与李代数相较于CH3是比较的抽象的数学知识,这个工具的提出目的是解决一些旋转位姿描述的优化问题.本讲最终的目的是解决如何描述对旋转求导的问题. ...
- SemanticKernel如何基于自有数据聊天
效果 使用gpt-3.5-turbo的效果 什么是向量数据库? 向量数据库是一种专为处理高维向量数据而设计的数据库系统.与传统的关系型数据库不同,向量数据库专注于存储和查询向量数据,例如图像.音频.文 ...
- 5、mysql优化--索引使用情况、索引的结构
避免索引失效 1). 全值匹配 ,对索引中所有列都指定具体值. 2). 最左前缀法则 如果索引了多列,要遵守最左前缀法则.指的是查询从索引的最左前列开始,并且不跳过索引中的列. 3). 范围查询右边的 ...
- Git常见的面试题
在软件开发领域,Git是一个极为重要的版本控制系统,几乎每个开发者都需要掌握它.因此,在面试过程中,Git常常成为了面试官们用来考察候选人技能和经验的重要工具之一.以下是一些常见的Git面试题,希望它 ...
- ANDROID : NEW IDEA
•前言 学习了 Android 开发后,小脑袋瓜中时不时会蹦跶出一些想法: 这些想法大都是我现在实现不了的,所以就需要记录一下,等学到相关知识时,在着手解决. •NEW IDEA 1 将一款 APP( ...
- https://pengchenggang.github.io/vuejsdev-com-github 备份发布
https://pengchenggang.github.io/vuejsdev-com-github 备份发布 现在还没有解决的就是 开clash,代码提交不上去,只能关了提,但是关了提交,也得赶运 ...