canny 算子python实现
1. Canny介绍
Canny算子与Marr(LoG)边缘检测方法类似,也属于是先平滑后求导数的方法。John Canny研究了最优边缘检测方法所需的特性,给出了评价边缘检测性能优劣的三个指标:
- 1 好的信噪比,即将非边缘点判定为边缘点的概率要低,将边缘点判为非边缘点的概率要低;
- 2 高的定位性能,即检测出的边缘点要尽可能在实际边缘的中心;
- 3 对单一边缘仅有唯一响应,即单个边缘产生多个响应的概率要低,并且虚假响应边缘应该得到最大抑制。
2. Canny检测实现过程
第一步:灰度化
第二步:高斯滤波
首先生成二维高斯分布矩阵:
然后与灰度图像进行卷积实现滤波:
第三步:计算梯度值和方向
求变化率时,对于一元函数,即求导;对于二元函数,求偏导。 数字图像处理中,用一阶有限差分近似求取灰度值的梯度值(变化率)。
(即:使差商(Δf/Δx)近似取代微商(∂f/∂x)。求灰度的变化率,分别取x和y方向上相邻像素做差,代替求取x和y
方向一阶偏导) 。
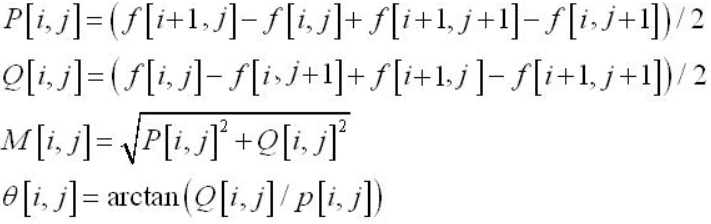
其中f为图像灰度值,P代表X方向梯度幅值,Q代表Y方向 梯度幅值,M是该点幅值,Θ是梯度方向,也就是角度。
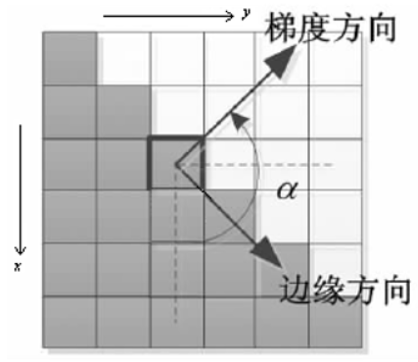
注:图像梯度方向与边缘方向互相垂直:
第四步:非极大值抑制(NMS)
通俗意义上是指寻找像素点局部最大值。沿着梯度方向,比较它前面和后面的梯度值。在沿其方向上邻域的梯度幅值最大,则保留;否则,抑制。
具体参考此文:canny 非极大值抑制 NMS
可以进行插值来提高结果。
第五步:双阈值的选取、边缘连接
- 选取高阈值T H 和低阈值T L ,比率为2:1或3:1。(一般取TH =0.3 或 0.2, TL =0.1 )
- 取出非极大值抑制后的图像中的最大梯度幅值,重新定义高低阈值。即:T H ×Max,T L ×Max 。(当然可以自己给定)
- 将小于TL 的点抛弃,赋0;将大于T H 的点立即标记(这些点就是边缘点),赋1。
- 将大于TL ,小于TH 的点使用8连通区域确定(即:只有与TH 像素连接时才会被接受,成为边缘点,赋1) 。
3. Canny检测Python实现
具体实现略有不同,例如:
高斯矩阵的实现过程、梯度幅值的实现过程、非极大值抑制的角度选取(可以选0,45,90,135)、边缘检测的实现过程。
# -*- coding: utf-8 -*-
"""
Created on Thu Dec 7 21:12:41 2017 @author: L.P.S
""" import matplotlib.pyplot as plt
import numpy as np
import math img = plt.imread('G:\\360downloads\\lps.png') sigma1 = sigma2 = 1
sum = 0 gaussian = np.zeros([5, 5])
for i in range(5):
for j in range(5):
gaussian[i,j] = math.exp(-1/2 * (np.square(i-3)/np.square(sigma1) #生成二维高斯分布矩阵
+ (np.square(j-3)/np.square(sigma2)))) / (2*math.pi*sigma1*sigma2)
sum = sum + gaussian[i, j] gaussian = gaussian/sum
# print(gaussian) def rgb2gray(rgb):
return np.dot(rgb[...,:3], [0.299, 0.587, 0.114]) # step1.高斯滤波
gray = rgb2gray(img)
W, H = gray.shape
new_gray = np.zeros([W-5, H-5])
for i in range(W-5):
for j in range(H-5):
new_gray[i,j] = np.sum(gray[i:i+5,j:j+5]*gaussian) # 与高斯矩阵卷积实现滤波 # plt.imshow(new_gray, cmap="gray") # step2.增强 通过求梯度幅值
W1, H1 = new_gray.shape
dx = np.zeros([W1-1, H1-1])
dy = np.zeros([W1-1, H1-1])
d = np.zeros([W1-1, H1-1])
for i in range(W1-1):
for j in range(H1-1):
dx[i,j] = new_gray[i, j+1] - new_gray[i, j]
dy[i,j] = new_gray[i+1, j] - new_gray[i, j]
d[i, j] = np.sqrt(np.square(dx[i,j]) + np.square(dy[i,j])) # 图像梯度幅值作为图像强度值 # plt.imshow(d, cmap="gray") # setp3.非极大值抑制 NMS
W2, H2 = d.shape
NMS = np.copy(d)
NMS[0,:] = NMS[W2-1,:] = NMS[:,0] = NMS[:, H2-1] = 0
for i in range(1, W2-1):
for j in range(1, H2-1): if d[i, j] == 0:
NMS[i, j] = 0
else:
gradX = dx[i, j]
gradY = dy[i, j]
gradTemp = d[i, j] # 如果Y方向幅度值较大
if np.abs(gradY) > np.abs(gradX):
weight = np.abs(gradX) / np.abs(gradY)
grad2 = d[i-1, j]
grad4 = d[i+1, j]
# 如果x,y方向梯度符号相同
if gradX * gradY > 0:
grad1 = d[i-1, j-1]
grad3 = d[i+1, j+1]
# 如果x,y方向梯度符号相反
else:
grad1 = d[i-1, j+1]
grad3 = d[i+1, j-1] # 如果X方向幅度值较大
else:
weight = np.abs(gradY) / np.abs(gradX)
grad2 = d[i, j-1]
grad4 = d[i, j+1]
# 如果x,y方向梯度符号相同
if gradX * gradY > 0:
grad1 = d[i+1, j-1]
grad3 = d[i-1, j+1]
# 如果x,y方向梯度符号相反
else:
grad1 = d[i-1, j-1]
grad3 = d[i+1, j+1] gradTemp1 = weight * grad1 + (1-weight) * grad2
gradTemp2 = weight * grad3 + (1-weight) * grad4
if gradTemp >= gradTemp1 and gradTemp >= gradTemp2:
NMS[i, j] = gradTemp
else:
NMS[i, j] = 0 # plt.imshow(NMS, cmap = "gray") # step4. 双阈值算法检测、连接边缘
W3, H3 = NMS.shape
DT = np.zeros([W3, H3])
# 定义高低阈值
TL = 0.2 * np.max(NMS)
TH = 0.3 * np.max(NMS)
for i in range(1, W3-1):
for j in range(1, H3-1):
if (NMS[i, j] < TL):
DT[i, j] = 0
elif (NMS[i, j] > TH):
DT[i, j] = 1
elif ((NMS[i-1, j-1:j+1] < TH).any() or (NMS[i+1, j-1:j+1]).any()
or (NMS[i, [j-1, j+1]] < TH).any()):
DT[i, j] = 1 plt.imshow(DT, cmap = "gray")
4. 实验结果
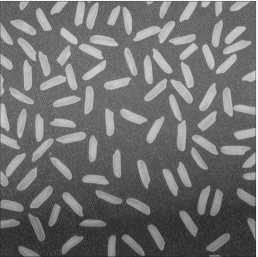
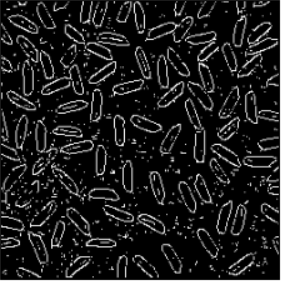
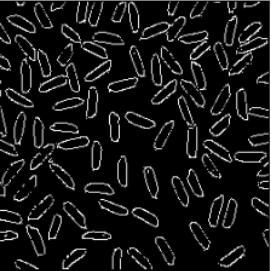
原图 双阈值:0.1*max, 0.3*max 双阈值:0.2*max, 0.3*max
参考:
Canny算子中的非极大值抑制(Non-Maximum Suppression)分析
图像学习之如何理解方向梯度直方图(Histogram Of Gradient)
canny 算子python实现的更多相关文章
- python opencv Sobel、Laplace、canny算子的边缘提取 以及参数解析
前提:各种算子不完全区分好坏,但根据我实际操作分析得到,有的算子之间效果大相径庭,但有的也很相似,也就是各有各的用法,这里按 Sobel.Laplace.canny三种算子作比较,看其结果: 一. ...
- Canny算子边缘检测(cvCanny)
Canny是常用的边缘检测方法,其特点是试图将独立边的候选像素拼装成轮廓. John Canny于1986年提出Canny算子,它与Marr(LoG)边缘检测方法类似,也属于是先平滑后求导数的方法. ...
- 【OpenCV新手教程之十二】OpenCV边缘检測:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/25560901 作者:毛星云(浅墨) ...
- [OpenCV入门教程之十二】OpenCV边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
http://blog.csdn.net/poem_qianmo/article/details/25560901 本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog ...
- 学习 opencv---(11)OpenC 边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器
本篇文章中,我们将一起学习OpenCV中边缘检测的各种算子和滤波器——Canny算子,Sobel算子,Laplace算子以及Scharr滤波器.文章中包含了五个浅墨为大家准备的详细注释的博文配套源代码 ...
- 边缘检测:Canny算子,Sobel算子,Laplace算子
1.canny算子 Canny边缘检测算子是John F.Canny于 1986 年开发出来的一个多级边缘检测算法.更为重要的是 Canny 创立了边缘检测计算理论(Computational the ...
- Pass算子python 函数
Pass算子python 函数 函数 函数是代码的一种组织形式 函数应该能完成一项特定的工作,而且一般一个函数只完成一项工作 有些语言,分函数和过程两个概念,通俗解释是,有返回结果的是函数,无返回结果 ...
- Canny算子
Canny边缘检测算子是John F. Canny于1986年开发出来的一个多级边缘检测算法.更为重要的是Canny创立了“边缘检测计算理论”(computational theory of edge ...
- canny算子求图像边缘,edgebox那部分
过程: 1. 彩色图像转换为灰度图像 2. 对图像进行高斯模糊 3. 计算图像梯度,根据梯度计算图像边缘幅值与角度(这里其实用到了微分边缘检测算子来计算梯度幅 ...
随机推荐
- MT【211】保序同构
设$S,T$是$R$的两个非空子集,如果存在一个从$S$到$T$的函数$y=f(x)$满足:$1)T=\{f(x)|x\in S\};$2)对任意$x_1,x_2\in S$,当$x_1<x_2 ...
- B2C商城关键技术点总结(站内搜索、定时任务)
1.站内搜索 1.1Lucene.Net建立信息索引 string indexPath = @"E:\xxx\xxx";//索引保存路径 FSDirectory directory ...
- 获取get值&DOM例题
获取get值: <body> <form action="9.26获取get值.html" method="get"> ...
- [luogu2822][组合数问题]
题目链接 题解: 对于上面和下面的式子进行分解质因数,然后看看上面的质因数个数减去下面的质因数个数能不能达到k的质因数的要求即可. 分解质因数的时候用对于阶乘分解质因数的常用方法:比如要求1999!中 ...
- react中实现点击跳转到新页面方法
实现点击跳转到新页面,可以有两种形式,一个是本地页面打开,一个是本地页面不变跳转到新的页面. (一)页面点击本地页面打开新页面 引入ant的Button组件 <Button style={{ba ...
- NO.8:绝不在构造或者析构过程中调用virtual函数
在构造和析构执行期间不要调用virtual函数,因为这类调用从不会下降至derived class(比起当前执行构造函数和析构函数) 如果在base class 构造函数或者析构函数调用virtual ...
- git<git常用命令>
1,初始化仓库: git init --此命令会在当前目录下新建一个Git仓库.新建了一个 .git的隐藏目录,仓库的所有数据都放在这个目录里.目前还是空的. 2,跟踪,暂存文件: git add - ...
- ElasticStack系列之二十 & 数据均衡、迁移、冷热分离以及节点自动发现原理与机制
1. 数据均衡 某个shard分配到哪个节点上,一般来说,是由 ELasticSearch 自行决定的.以下几种情况会触发分配动作: 新索引的建立 索引的删除 新增副本分片 节点增减引发的数据均衡 在 ...
- 怎样解决Myeclipse内存溢出?
打开myeclipse 10安装目录下的myeclipse.ini文件 打开文件,将文件圈圈中的内容设置如下图: 上面是其中一种解决方案,下面介绍第二种解决方案 设置Default VM Argume ...
- Spring + Mybatis 读写分离
项目背景:项目开发中数据库使用了读写分离,所有查询语句走从库,除此之外走主库. 实现思路是: 第一步,实现动态切换数据源:配置两个DataSource,配置两个SqlSessionFactory指向两 ...