《机器人SLAM导航核心技术与实战》先导课:SLAM的应用价值与技术难点
- 先 导 课
- 第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
- 第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
- 第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
- 答 疑 课

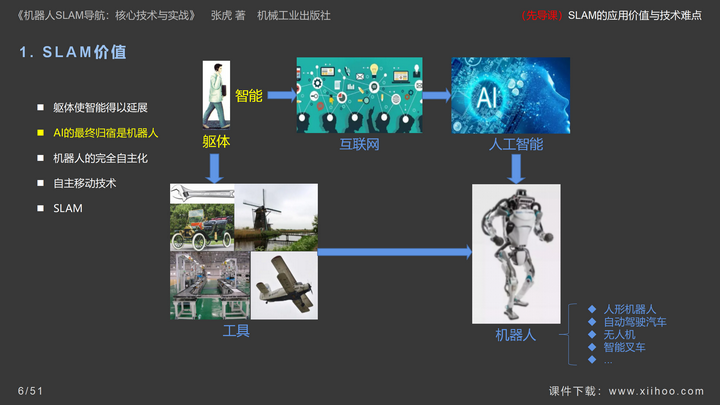
- 躯体使智能得以延展
- AI的最终归宿是机器人
- 机器人的完全自主化
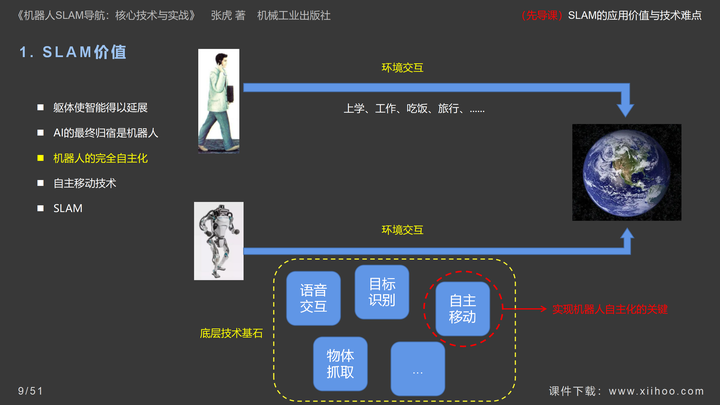
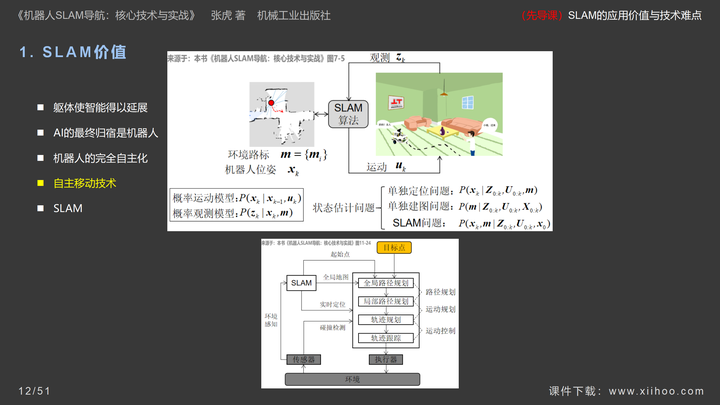
- 自主移动技术
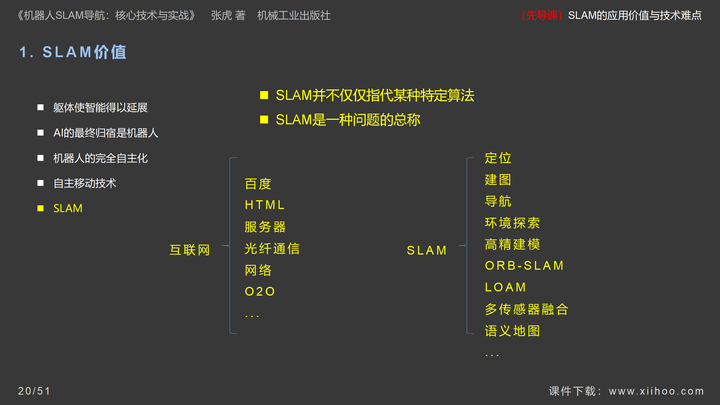
- SLAM









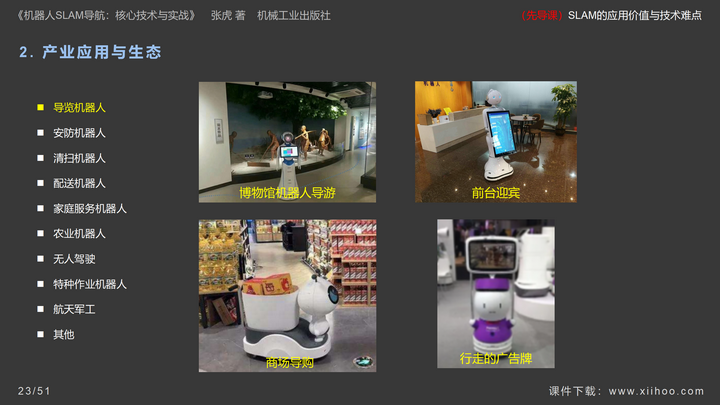
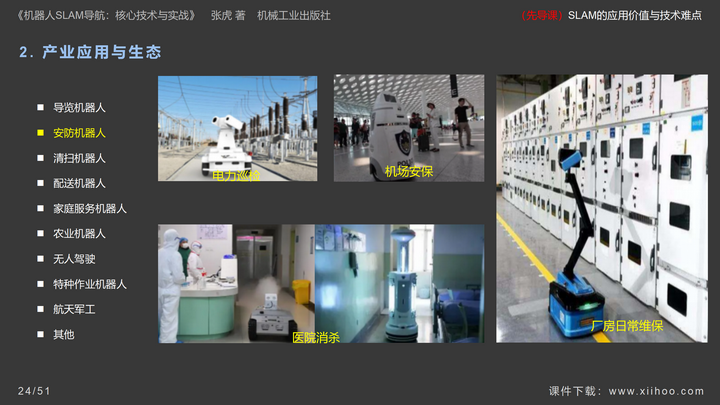
- 导览机器人
- 安防机器人
- 清扫机器人
- 配送机器人
- 家庭服务机器人
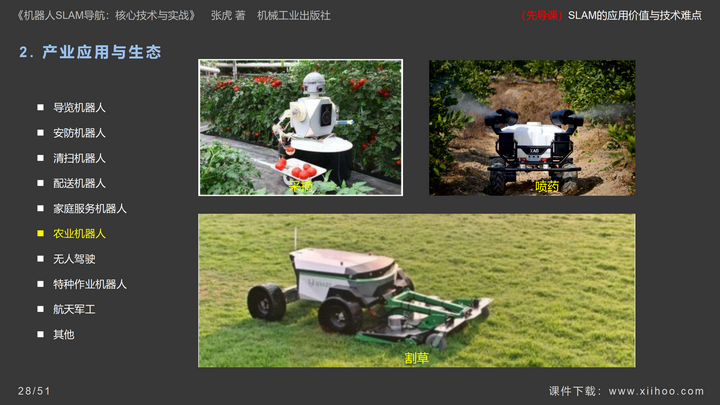
- 农业机器人
- 无人驾驶
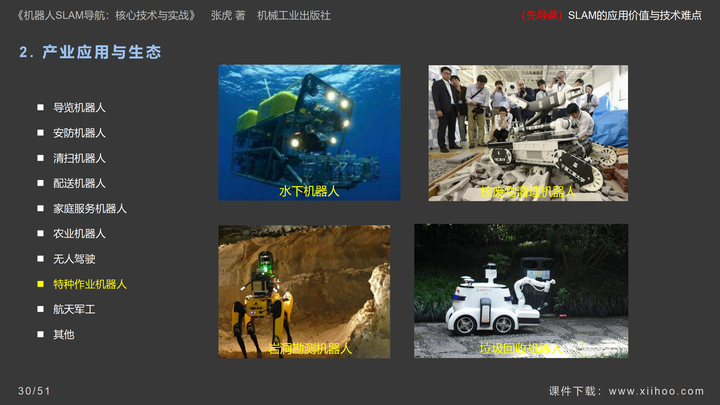
- 特种作业机器人
- 航天军工
- 其他







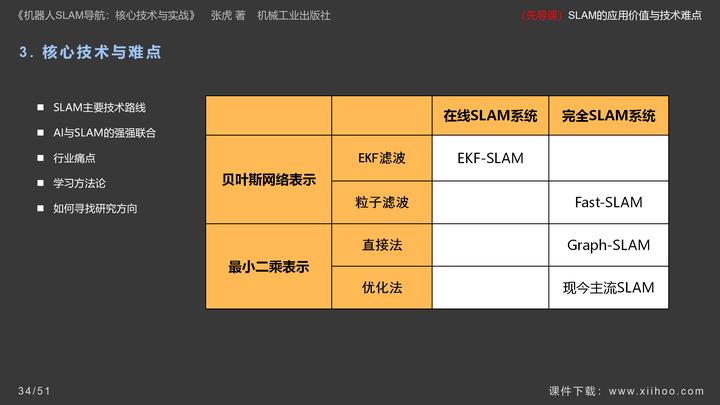
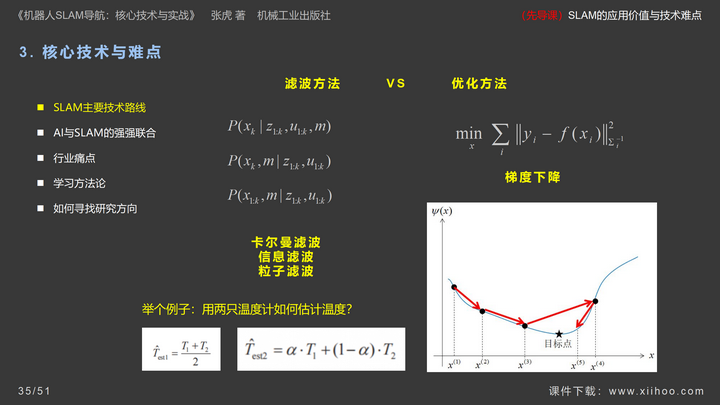
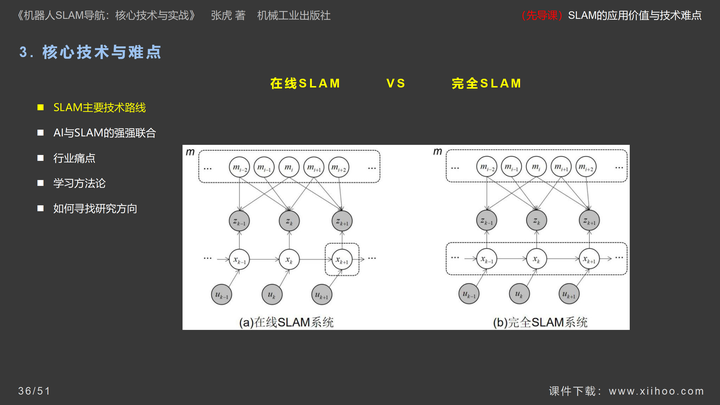
- SLAM主要技术路线
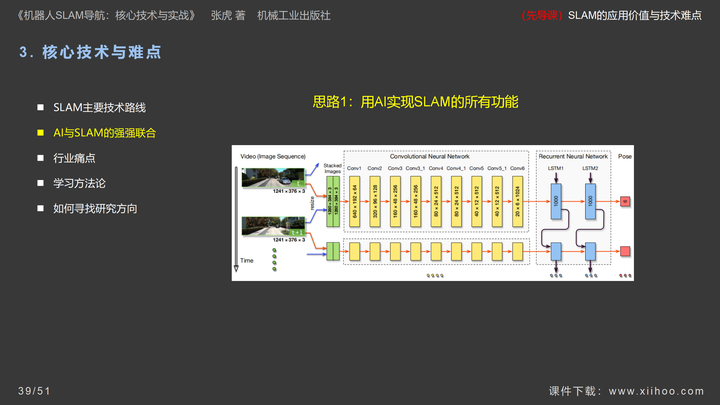
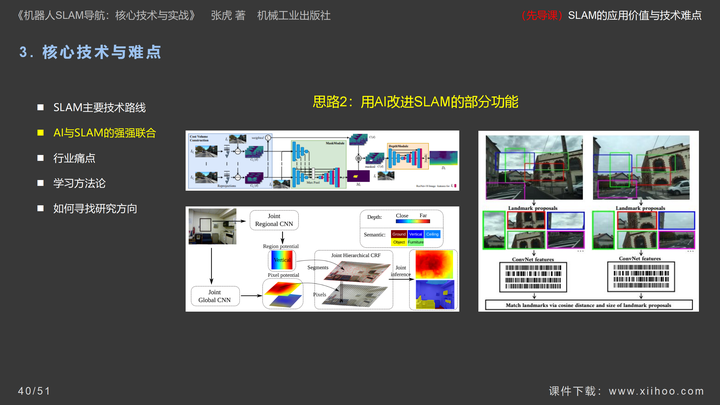
- AI与SLAM的强强联合
- 行业痛点
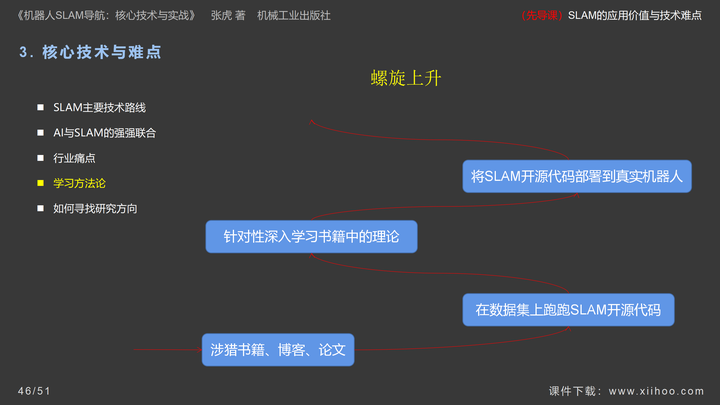
- 学习方法论
- 如何寻找研究方向






- 发现新应用领域:水下SLAM应用、手动编辑SLAM地图、SLAM云计算化
- 软件工程的优化:去ROS化、裸机级SLAM、跨平台兼容
- 改进SLAM某些功能模块:特征提取新方法、闭环检测可靠性、持久化建图机制
- 多传感器融合:传感器标定、时间戳同步、去干扰数据、数据关联
- AI+SLAM:端到端SLAM、语义SLAM、特征工程
- 克服异常场景:玻璃障碍物、传感器盲区、光照变化、上下坡问题
- Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
- PPT课件下载:
- PDF课件下载:
《机器人SLAM导航核心技术与实战》先导课:SLAM的应用价值与技术难点的更多相关文章
- 《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器
<机器人SLAM导航核心技术与实战>第1季:第4章_机器人传感器 视频讲解 [第1季]4.第4章_机器人传感器-视频讲解 [第1季]4.1.第4章_机器人传感器_惯性测量单元-视频讲解 [ ...
- RViz 实时观测机器人建立导航2D封闭空间地图过程 (SLAM) ----27
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ ROS提供了非常强大的图形化模拟环境 RViz,这个 RViz 能做的事情非常多.今天我们学习一下如何使 ...
- 除了ROS, 机器人定位导航还有其他方案吗?
利用ROS进行机器人开发,我想大多数企业是想借助ROS实现机器人的导航.定位与路径规划,它的出现大大降低了机器人领域的开发门槛,开发者无需向前人一样走众多弯路,掌握多种知识才能开始实现机器人设计的梦想 ...
- Elasticsearch核心技术与实战-学习笔记
学习资源: Elasticsearch中文社区日报https://elasticsearch.cn/article/ Elasticsearch 官网 https://www.elastic.co/ ...
- Kafka核心技术与实战,分布式的高性能消息引擎服务
Kafka是LinkedIn开发并开源的一套分布式的高性能消息引擎服务,是大数据时代数据管道技术的首选. 如今的Kafka集消息系统.存储系统和流式处理平台于一身,并作为连接着各种业务前台和数据后台的 ...
- Elasticsearch核心技术与实战,性能是真牛
Elasticsearch 是一款非常强大的开源搜索及分析引擎.结合 Kibana.Logstash和Beats,Elasticsearch 还被广泛运用在大数据近实时分析,包括日志分析.指标监控.信 ...
- BAD SLAM:捆绑束调整直接RGB-D SLAM
BAD SLAM:捆绑束调整直接RGB-D SLAM BAD SLAM: Bundle Adjusted Direct RGB-D SLAM 论文地址: http://openaccess.thecv ...
- 一站式入口服务|爱奇艺微服务平台 API 网关实战 原创 弹性计算团队 爱奇艺技术产品团队
一站式入口服务|爱奇艺微服务平台 API 网关实战 原创 弹性计算团队 爱奇艺技术产品团队
- 十四课 slam&gmapping
gmapping 根据激光数据(或者深度数据模拟的激光数据)建立地图,在turtlebot里面应用的就是深度数据模拟的激光数据.如果没有激光雷达的话可以使用Kinect. SLAM 机器人在未知环境中 ...
- Python核心技术与实战——十九|一起看看Python全局解释器锁GIL
我们在前面的几节课里讲了Python的并发编程的特性,也了解了多线程编程.事实上,Python的多线程有一个非常重要的话题——GIL(Global Interpreter Lock).我们今天就来讲一 ...
随机推荐
- 「V 曲闲谈」《万物与我同归于寂》——终与始
死亡, 胃酸逆流 失去最初模样 开端与结局颠倒 脉搏也摇晃 于强烈的动机下选定这首歌,但构思时又发觉,一个十六岁的青年,似乎在这个艰涩的哲学问题上难以开口. 那么先来说说我的动机.为什么我 ...
- JS播放m3u8
JS播放m3u8: 利用 hls.min.js <!DOCTYPE html> <html> <head> <title>HLS Video Playb ...
- HBase的Memstore-schema-rowkey设计原则
schema设计原则 前提条件 使用HBase Shell或者Java API的HBaseAdmin来创建和编辑HBase的Schema,当修改列簇时,建议先将这张表下线. Configurati ...
- linux基础知识(基本认知、操作命令、常用技巧)
文章目录 Linux基本认知 容量大小 自动补全命令或文件(夹) 复用之前的命令 Linux文件系统 Linux中命令和执行程序长什么样子 执行过的历史命令的记录文件的位置 linux的隐藏文件 Li ...
- 使用kNN算法改进约会网站配对效果(尺度归一化问题)
简单匹配:
- 十二. Redis 集群操作配置(超详细配图,配截图详细说明)
十二. Redis 集群操作配置(超详细配图,配截图详细说明) @ 目录 十二. Redis 集群操作配置(超详细配图,配截图详细说明) 1. 为什么需要集群-高可用性 2. 集群概述(及其搭建) 3 ...
- Idea无法下载插件或下载插件报错
Plugin Python was not installed: Cannot download 'https://plugins.jetbrains. file -> settings -& ...
- 如何在Spring Boot项目中添加国密SM4加密支持?——基于过滤器的实现
如何在Spring Boot项目中添加国密SM4加密支持呢?--基于过滤器的实现 引言 在数字化时代,数据安全至关重要,尤其是在API交互过程中,确保传输数据的安全性是保护隐私和机密信息的关键.中 ...
- DispatcherPriority 枚举
DispatcherPriority 枚举 ApplicationIdle 2 枚举值为 2. 在应用程序空闲时处理操作. Background 4 枚举值为 4. 在完成所有其他非空闲操作后处理操作 ...
- [TJOI/HEOI2016] 求和 题解
为什么又是佳媛姐姐啊啊啊! 斯特林数在这道题中不好处理,直接拆开: \[f(n)=\sum_{i=0}^n\sum_{j=0}^i\begin{Bmatrix}i\\j\end{Bmatrix}2^j ...