键盘过滤第一个例子ctrl2cap(4.1~4.4)汇总,测试
键盘过滤第一个例子ctrl2cap(4.1~4.4)汇总,测试
完整源代码
///
/// @file ctrl2cap.c
/// @author wowocock
/// @date 2009-1-27
/// #include <wdm.h>
#include <ntddkbd.h>
#include "ctrl2cap.h" typedef struct _C2P_DEV_EXT
{
// 这个结构的大小
ULONG NodeSize;
// 过滤设备对象
PDEVICE_OBJECT pFilterDeviceObject;
// 同时调用时的保护锁
KSPIN_LOCK IoRequestsSpinLock;
// 进程间同步处理
KEVENT IoInProgressEvent;
// 绑定的设备对象
PDEVICE_OBJECT TargetDeviceObject;
// 绑定前底层设备对象
PDEVICE_OBJECT LowerDeviceObject;
} C2P_DEV_EXT, *PC2P_DEV_EXT; // flags for keyboard status
#define S_SHIFT 1
#define S_CAPS 2
#define S_NUM 4
static int kb_status = S_NUM;
void __stdcall print_keystroke(UCHAR sch)
{
UCHAR ch = ;
int off = ; if ((sch & 0x80) == ) //make
{
if ((sch < 0x47) ||
((sch >= 0x47 && sch < 0x54) && (kb_status & S_NUM))) // Num Lock
{
ch = asciiTbl[off+sch];
} switch (sch)
{
case 0x3A:
kb_status ^= S_CAPS;
break; case 0x2A:
case 0x36:
kb_status |= S_SHIFT;
break; case 0x45:
kb_status ^= S_NUM;
}
}
else //break
{
if (sch == 0xAA || sch == 0xB6)
kb_status &= ~S_SHIFT;
} if (ch >= 0x20 && ch < 0x7F)
{
DbgPrint("%C \n",ch);
} } NTSTATUS
c2pDevExtInit(
IN PC2P_DEV_EXT devExt,
IN PDEVICE_OBJECT pFilterDeviceObject,
IN PDEVICE_OBJECT pTargetDeviceObject,
IN PDEVICE_OBJECT pLowerDeviceObject )
{
memset(devExt, , sizeof(C2P_DEV_EXT));
devExt->NodeSize = sizeof(C2P_DEV_EXT);
devExt->pFilterDeviceObject = pFilterDeviceObject;
KeInitializeSpinLock(&(devExt->IoRequestsSpinLock));
KeInitializeEvent(&(devExt->IoInProgressEvent), NotificationEvent, FALSE);
devExt->TargetDeviceObject = pTargetDeviceObject;
devExt->LowerDeviceObject = pLowerDeviceObject;
return( STATUS_SUCCESS );
} // 这个函数是事实存在的,只是文档中没有公开。声明一下
// 就可以直接使用了。
NTSTATUS
ObReferenceObjectByName(
PUNICODE_STRING ObjectName,
ULONG Attributes,
PACCESS_STATE AccessState,
ACCESS_MASK DesiredAccess,
POBJECT_TYPE ObjectType,
KPROCESSOR_MODE AccessMode,
PVOID ParseContext,
PVOID *Object
); extern POBJECT_TYPE IoDriverObjectType;
ULONG gC2pKeyCount = ;
PDRIVER_OBJECT gDriverObject = NULL; // 这个函数经过改造。能打开驱动对象Kbdclass,然后绑定
// 它下面的所有的设备:
NTSTATUS
c2pAttachDevices(
IN PDRIVER_OBJECT DriverObject,
IN PUNICODE_STRING RegistryPath
)
{
NTSTATUS status = ;
UNICODE_STRING uniNtNameString;
PC2P_DEV_EXT devExt;
PDEVICE_OBJECT pFilterDeviceObject = NULL;
PDEVICE_OBJECT pTargetDeviceObject = NULL;
PDEVICE_OBJECT pLowerDeviceObject = NULL; PDRIVER_OBJECT KbdDriverObject = NULL; KdPrint(("MyAttach\n")); // 初始化一个字符串,就是Kdbclass驱动的名字。
RtlInitUnicodeString(&uniNtNameString, KBD_DRIVER_NAME);
// 请参照前面打开设备对象的例子。只是这里打开的是驱动对象。
status = ObReferenceObjectByName (
&uniNtNameString,
OBJ_CASE_INSENSITIVE,
NULL,
,
IoDriverObjectType,
KernelMode,
NULL,
&KbdDriverObject
);
// 如果失败了就直接返回
if(!NT_SUCCESS(status))
{
KdPrint(("MyAttach: Couldn't get the MyTest Device Object\n"));
return( status );
}
else
{
// 这个打开需要解应用。早点解除了免得之后忘记。
ObDereferenceObject(DriverObject);
} // 这是设备链中的第一个设备
pTargetDeviceObject = KbdDriverObject->DeviceObject;
// 现在开始遍历这个设备链
while (pTargetDeviceObject)
{
// 生成一个过滤设备,这是前面读者学习过的。这里的IN宏和OUT宏都是
// 空宏,只有标志性意义,表明这个参数是一个输入或者输出参数。
status = IoCreateDevice(
IN DriverObject,
IN sizeof(C2P_DEV_EXT),
IN NULL,
IN pTargetDeviceObject->DeviceType,
IN pTargetDeviceObject->Characteristics,
IN FALSE,
OUT &pFilterDeviceObject
); // 如果失败了就直接退出。
if (!NT_SUCCESS(status))
{
KdPrint(("MyAttach: Couldn't create the MyFilter Filter Device Object\n"));
return (status);
} // 绑定。pLowerDeviceObject是绑定之后得到的下一个设备。也就是
// 前面常常说的所谓真实设备。
pLowerDeviceObject =
IoAttachDeviceToDeviceStack(pFilterDeviceObject, pTargetDeviceObject);
// 如果绑定失败了,放弃之前的操作,退出。
if(!pLowerDeviceObject)
{
KdPrint(("MyAttach: Couldn't attach to MyTest Device Object\n"));
IoDeleteDevice(pFilterDeviceObject);
pFilterDeviceObject = NULL;
return( status );
} // 设备扩展!下面要详细讲述设备扩展的应用。
devExt = (PC2P_DEV_EXT)(pFilterDeviceObject->DeviceExtension);
c2pDevExtInit(
devExt,
pFilterDeviceObject,
pTargetDeviceObject,
pLowerDeviceObject ); // 下面的操作和前面过滤串口的操作基本一致。这里不再解释了。
pFilterDeviceObject->DeviceType=pLowerDeviceObject->DeviceType;
pFilterDeviceObject->Characteristics=pLowerDeviceObject->Characteristics;
pFilterDeviceObject->StackSize=pLowerDeviceObject->StackSize+;
pFilterDeviceObject->Flags |= pLowerDeviceObject->Flags & (DO_BUFFERED_IO | DO_DIRECT_IO | DO_POWER_PAGABLE) ;
//next device
pTargetDeviceObject = pTargetDeviceObject->NextDevice;
}
return status;
} VOID
c2pDetach(IN PDEVICE_OBJECT pDeviceObject)
{
PC2P_DEV_EXT devExt;
BOOLEAN NoRequestsOutstanding = FALSE;
devExt = (PC2P_DEV_EXT)pDeviceObject->DeviceExtension;
__try
{
__try
{
IoDetachDevice(devExt->TargetDeviceObject);
devExt->TargetDeviceObject = NULL;
IoDeleteDevice(pDeviceObject);
devExt->pFilterDeviceObject = NULL;
DbgPrint(("Detach Finished\n"));
}
__except (EXCEPTION_EXECUTE_HANDLER){}
}
__finally{}
return;
} #define DELAY_ONE_MICROSECOND (-10)
#define DELAY_ONE_MILLISECOND (DELAY_ONE_MICROSECOND*1000)
#define DELAY_ONE_SECOND (DELAY_ONE_MILLISECOND*1000) VOID
c2pUnload(IN PDRIVER_OBJECT DriverObject)
{
PDEVICE_OBJECT DeviceObject;
PDEVICE_OBJECT OldDeviceObject;
PC2P_DEV_EXT devExt; LARGE_INTEGER lDelay;
PRKTHREAD CurrentThread;
//delay some time
lDelay = RtlConvertLongToLargeInteger( * DELAY_ONE_MILLISECOND);
CurrentThread = KeGetCurrentThread();
// 把当前线程设置为低实时模式,以便让它的运行尽量少影响其他程序。
KeSetPriorityThread(CurrentThread, LOW_REALTIME_PRIORITY); UNREFERENCED_PARAMETER(DriverObject);
KdPrint(("DriverEntry unLoading...\n")); // 遍历所有设备并一律解除绑定
DeviceObject = DriverObject->DeviceObject;
while (DeviceObject)
{
// 解除绑定并删除所有的设备
c2pDetach(DeviceObject);
DeviceObject = DeviceObject->NextDevice;
}
ASSERT(NULL == DriverObject->DeviceObject); while (gC2pKeyCount)
{
KeDelayExecutionThread(KernelMode, FALSE, &lDelay);
}
KdPrint(("DriverEntry unLoad OK!\n"));
return;
} NTSTATUS c2pDispatchGeneral(
IN PDEVICE_OBJECT DeviceObject,
IN PIRP Irp
)
{
// 其他的分发函数,直接skip然后用IoCallDriver把IRP发送到真实设备
// 的设备对象。
KdPrint(("Other Diapatch!"));
IoSkipCurrentIrpStackLocation(Irp);
return IoCallDriver(((PC2P_DEV_EXT)
DeviceObject->DeviceExtension)->LowerDeviceObject, Irp);
} //只处理主功能号为IRP_MJ_POWER的IRP
NTSTATUS c2pPower(
IN PDEVICE_OBJECT DeviceObject,
IN PIRP Irp
)
{
PC2P_DEV_EXT devExt;
devExt =
(PC2P_DEV_EXT)DeviceObject->DeviceExtension; PoStartNextPowerIrp( Irp );
IoSkipCurrentIrpStackLocation( Irp );
return PoCallDriver(devExt->LowerDeviceObject, Irp );
} //当有一个设备被拔出时,则解除绑定,并删除过滤设备。
NTSTATUS c2pPnP(
IN PDEVICE_OBJECT DeviceObject,
IN PIRP Irp
)
{
PC2P_DEV_EXT devExt;
PIO_STACK_LOCATION irpStack;
NTSTATUS status = STATUS_SUCCESS;
KIRQL oldIrql;
KEVENT event; // 获得真实设备。
devExt = (PC2P_DEV_EXT)(DeviceObject->DeviceExtension);
irpStack = IoGetCurrentIrpStackLocation(Irp); switch (irpStack->MinorFunction)
{
case IRP_MN_REMOVE_DEVICE:
KdPrint(("IRP_MN_REMOVE_DEVICE\n")); // 首先把请求发下去
IoSkipCurrentIrpStackLocation(Irp);
IoCallDriver(devExt->LowerDeviceObject, Irp);
// 然后解除绑定。
IoDetachDevice(devExt->LowerDeviceObject);
// 删除我们自己生成的虚拟设备。
IoDeleteDevice(DeviceObject);
status = STATUS_SUCCESS;
break; default:
// 对于其他类型的IRP,全部都直接下发即可。
IoSkipCurrentIrpStackLocation(Irp);
status = IoCallDriver(devExt->LowerDeviceObject, Irp);
}
return status;
} // 这是一个IRP完成回调函数的原型
NTSTATUS c2pReadComplete(
IN PDEVICE_OBJECT DeviceObject,
IN PIRP Irp,
IN PVOID Context
)
{
PIO_STACK_LOCATION IrpSp;
ULONG buf_len = ;
PUCHAR buf = NULL;
size_t i,numKeys; PKEYBOARD_INPUT_DATA KeyData; IrpSp = IoGetCurrentIrpStackLocation( Irp ); // 如果这个请求是成功的。很显然,如果请求失败了,这么获取
// 进一步的信息是没意义的。
if( NT_SUCCESS( Irp->IoStatus.Status ) )
{
// 获得读请求完成后输出的缓冲区
buf = Irp->AssociatedIrp.SystemBuffer;
KeyData = (PKEYBOARD_INPUT_DATA)buf;
// 获得这个缓冲区的长度。一般的说返回值有多长都保存在
// Information中。
buf_len = Irp->IoStatus.Information;
numKeys = buf_len / sizeof(KEYBOARD_INPUT_DATA);
//… 这里可以做进一步的处理。我这里很简单的打印出所有的扫
// 描码。
//for(i=0;i<buf_len;++i)
for(i=;i<numKeys;++i)
{
//DbgPrint("ctrl2cap: %2x\r\n", buf[i]);
DbgPrint("\n");
DbgPrint("numKeys : %d",numKeys);
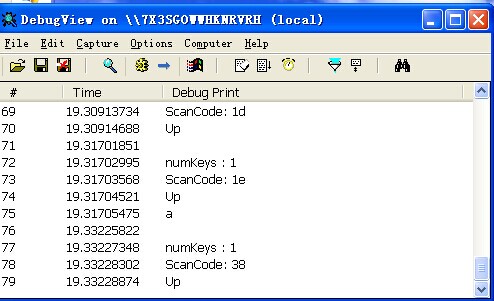
DbgPrint("ScanCode: %x ", KeyData->MakeCode );
DbgPrint("%s\n", KeyData->Flags ?"Up" : "Down" );
print_keystroke((UCHAR)KeyData->MakeCode); if( KeyData->MakeCode == CAPS_LOCK)
{
KeyData->MakeCode = LCONTROL;
}
}
}
gC2pKeyCount--; if( Irp->PendingReturned )
{
IoMarkIrpPending( Irp );
}
return Irp->IoStatus.Status;
} NTSTATUS c2pDispatchRead(
IN PDEVICE_OBJECT DeviceObject,
IN PIRP Irp )
{
NTSTATUS status = STATUS_SUCCESS;
PC2P_DEV_EXT devExt;
PIO_STACK_LOCATION currentIrpStack;
KEVENT waitEvent;
KeInitializeEvent( &waitEvent, NotificationEvent, FALSE ); if (Irp->CurrentLocation == )
{
ULONG ReturnedInformation = ;
KdPrint(("Dispatch encountered bogus current location\n"));
status = STATUS_INVALID_DEVICE_REQUEST;
Irp->IoStatus.Status = status;
Irp->IoStatus.Information = ReturnedInformation;
IoCompleteRequest(Irp, IO_NO_INCREMENT);
return(status);
} // 全局变量键计数器加1
gC2pKeyCount++; // 得到设备扩展。目的是之后为了获得下一个设备的指针。
devExt =
(PC2P_DEV_EXT)DeviceObject->DeviceExtension; // 设置回调函数并把IRP传递下去。 之后读的处理也就结束了。
// 剩下的任务是要等待读请求完成。
currentIrpStack = IoGetCurrentIrpStackLocation(Irp);
IoCopyCurrentIrpStackLocationToNext(Irp);
IoSetCompletionRoutine( Irp, c2pReadComplete,
DeviceObject, TRUE, TRUE, TRUE );
return IoCallDriver( devExt->LowerDeviceObject, Irp );
} NTSTATUS DriverEntry(
IN PDRIVER_OBJECT DriverObject,
IN PUNICODE_STRING RegistryPath
)
{
ULONG i;
NTSTATUS status;
KdPrint (("c2p.SYS: entering DriverEntry\n")); // 填写所有的分发函数的指针
for (i = ; i < IRP_MJ_MAXIMUM_FUNCTION; i++)
{
DriverObject->MajorFunction[i] = c2pDispatchGeneral;
} // 单独的填写一个Read分发函数。因为要的过滤就是读取来的按键信息
// 其他的都不重要。这个分发函数单独写。
DriverObject->MajorFunction[IRP_MJ_READ] = c2pDispatchRead; // 单独的填写一个IRP_MJ_POWER函数。这是因为这类请求中间要调用
// 一个PoCallDriver和一个PoStartNextPowerIrp,比较特殊。
DriverObject->MajorFunction [IRP_MJ_POWER] = c2pPower; // 我们想知道什么时候一个我们绑定过的设备被卸载了(比如从机器上
// 被拔掉了?)所以专门写一个PNP(即插即用)分发函数
DriverObject->MajorFunction [IRP_MJ_PNP] = c2pPnP; // 卸载函数。
DriverObject->DriverUnload = c2pUnload;
gDriverObject = DriverObject;
// 绑定所有键盘设备
status =c2pAttachDevices(DriverObject, RegistryPath); return status;
}
ctrl2cap.h代码:
#pragma once
// Kbdclass驱动的名字
#define KBD_DRIVER_NAME L"\\Driver\\Kbdclass" #define KEY_UP 1
#define KEY_DOWN 0 #define LCONTROL ((USHORT)0x1D)
#define CAPS_LOCK ((USHORT)0x3A) //
// Print macro that only turns on when checked builds are on
//
//#if DBG
//#define DbgPrint(arg) DbgPrint arg
//#else
//#define DbgPrint(arg)
//#endif //
// Delay values for KeDelayExecutionThread()
// (Values are negative to represent relative time)
// #define DELAY_ONE_MICROSECOND (-10)
#define DELAY_ONE_MILLISECOND (DELAY_ONE_MICROSECOND*1000)
#define DELAY_ONE_SECOND (DELAY_ONE_MILLISECOND*1000) unsigned char asciiTbl[]={
0x00, 0x1B, 0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37, 0x38, 0x39, 0x30, 0x2D, 0x3D, 0x08, 0x09, //normal
0x71, 0x77, 0x65, 0x72, 0x74, 0x79, 0x75, 0x69, 0x6F, 0x70, 0x5B, 0x5D, 0x0D, 0x00, 0x61, 0x73,
0x64, 0x66, 0x67, 0x68, 0x6A, 0x6B, 0x6C, 0x3B, 0x27, 0x60, 0x00, 0x5C, 0x7A, 0x78, 0x63, 0x76,
0x62, 0x6E, 0x6D, 0x2C, 0x2E, 0x2F, 0x00, 0x2A, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x37, 0x38, 0x39, 0x2D, 0x34, 0x35, 0x36, 0x2B, 0x31,
0x32, 0x33, 0x30, 0x2E,
0x00, 0x1B, 0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37, 0x38, 0x39, 0x30, 0x2D, 0x3D, 0x08, 0x09, //caps
0x51, 0x57, 0x45, 0x52, 0x54, 0x59, 0x55, 0x49, 0x4F, 0x50, 0x5B, 0x5D, 0x0D, 0x00, 0x41, 0x53,
0x44, 0x46, 0x47, 0x48, 0x4A, 0x4B, 0x4C, 0x3B, 0x27, 0x60, 0x00, 0x5C, 0x5A, 0x58, 0x43, 0x56,
0x42, 0x4E, 0x4D, 0x2C, 0x2E, 0x2F, 0x00, 0x2A, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x37, 0x38, 0x39, 0x2D, 0x34, 0x35, 0x36, 0x2B, 0x31,
0x32, 0x33, 0x30, 0x2E,
0x00, 0x1B, 0x21, 0x40, 0x23, 0x24, 0x25, 0x5E, 0x26, 0x2A, 0x28, 0x29, 0x5F, 0x2B, 0x08, 0x09, //shift
0x51, 0x57, 0x45, 0x52, 0x54, 0x59, 0x55, 0x49, 0x4F, 0x50, 0x7B, 0x7D, 0x0D, 0x00, 0x41, 0x53,
0x44, 0x46, 0x47, 0x48, 0x4A, 0x4B, 0x4C, 0x3A, 0x22, 0x7E, 0x00, 0x7C, 0x5A, 0x58, 0x43, 0x56,
0x42, 0x4E, 0x4D, 0x3C, 0x3E, 0x3F, 0x00, 0x2A, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x37, 0x38, 0x39, 0x2D, 0x34, 0x35, 0x36, 0x2B, 0x31,
0x32, 0x33, 0x30, 0x2E,
0x00, 0x1B, 0x21, 0x40, 0x23, 0x24, 0x25, 0x5E, 0x26, 0x2A, 0x28, 0x29, 0x5F, 0x2B, 0x08, 0x09, //caps + shift
0x71, 0x77, 0x65, 0x72, 0x74, 0x79, 0x75, 0x69, 0x6F, 0x70, 0x7B, 0x7D, 0x0D, 0x00, 0x61, 0x73,
0x64, 0x66, 0x67, 0x68, 0x6A, 0x6B, 0x6C, 0x3A, 0x22, 0x7E, 0x00, 0x7C, 0x7A, 0x78, 0x63, 0x76,
0x62, 0x6E, 0x6D, 0x3C, 0x3E, 0x3F, 0x00, 0x2A, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x37, 0x38, 0x39, 0x2D, 0x34, 0x35, 0x36, 0x2B, 0x31,
0x32, 0x33, 0x30, 0x2E
};
按键输出结果:
程序虽然可以动态卸载,但是要注意的是,停止之后,必须要按下一个键才能彻底退出。
键盘过滤第一个例子ctrl2cap(4.1~4.4)汇总,测试的更多相关文章
- [内核编程] 键盘过滤第一个例子ctrl2cap(4.1~4.4)汇总,测试
键盘过滤第一个例子ctrl2cap(4.1~4.4)汇总,测试 完整源代码 /// /// @file ctrl2cap.c /// @author wowocock /// @date 2009-1 ...
- ElasticSearch 5学习(5)——第一个例子(很实用)
想要知道ElasticSearch是如何使用的,最快的方式就是通过一个简单的例子,第一个例子将会包括基本概念如索引.搜索.和聚合等,需求是关于公司管理员工的一些业务. 员工文档索引 业务首先需要存储员 ...
- 4.1 技术原理 & 4.2 键盘过滤框架
4.1 技术原理 & 4.2 键盘过滤框架 4.1 预备知识 符号链接:符号链接其实就是一个“别名”.可以用一个不同的名字来代表一个设备对象(实际上),符号链接可以指向任何有名字的对象. Zw ...
- ElasticSearch 5学习(5)——第一个例子
想要知道ElasticSearch是如何使用的,最快的方式就是通过一个简单的例子,第一个例子将会包括基本概念如索引.搜索.和聚合等,需求是关于公司管理员工的一些业务. 员工文档索引 业务首先需要存储员 ...
- [内核编程] 4.1 技术原理 & 4.2 键盘过滤框架
4.1 技术原理 & 4.2 键盘过滤框架 4.1 预备知识 符号链接:符号链接其实就是一个“别名”.可以用一个不同的名字来代表一个设备对象(实际上),符号链接可以指向任何有名字的对象. Zw ...
- MXNet学习~第一个例子~跑MNIST
反正基本上是给自己看的,直接贴写过注释后的代码,可能有的地方理解不对,你多担待,看到了也提出来(基本上对未来的自己说的),三层跑到了97%,毕竟是第一个例子,主要就是用来理解MXNet怎么使用. #导 ...
- emberjs学习一(环境和第一个例子)
code { margin: 0; padding: 0; white-space: pre; border: none; background: transparent; } code, pre t ...
- Qt之QCustomPlot绘图(一)配置和第一个例子
最近一个用Qt开发的项目需要绘制坐标曲线,我在老师的指点下使用了QCustomPlot这个插件,使用方法简单,功能还算不错. 可是在网上找了很多资料和博文都只是将官方提供的例子演示一遍,没有系统全面的 ...
- springmvc的介绍和第一个例子
SpringMVC是Spring 框架自带的一部分. SpringMVC底层基于:Servlet Struts2底层基于:filter struts1底层基于:Servlet spring 各模块 我 ...
随机推荐
- Problem A Where is the Marble?(查找排序)
题目链接:Problem A 题意:有n块大理石,每个大理石上写着一个非负数,首先把数从小到大排序,接下来有Q个问题,每个问题是是否有某个大理石上写着x,如果有,则输出对应的大理石编号. 思路:先排序 ...
- python自学笔记(十一)关于函数及书写格式
1.函数是抽象的第一步 1.1 有关高压锅 1.2 函数是抽象出来的结构,是总结,是方法 1.3 多用函数 2.如何定义函数 2.1 def是关键词, ...
- IOS 学习笔记(6) 控件 文本域(UITextField)的使用方法
UITextField控件的诸多特性都和UITextView相似,比如成为输入文本焦点时键盘自动显示,支持长按弹出动作选项,能够接收输入事件(开始输入,修改内容,结束输入和点击回车等). 1.特有的特 ...
- WINDOWS操作系统中可以允许最大的线程数(线程栈预留1M空间)(56篇Windows博客值得一看)
WINDOWS操作系统中可以允许最大的线程数 默认情况下,一个线程的栈要预留1M的内存空间 而一个进程中可用的内存空间只有2G,所以理论上一个进程中最多可以开2048个线程 但是内存当然不可能完全拿来 ...
- Apache RewriteCond RewriteRule 入门和Laravel去掉index.php
Ci删除index.php办法: 创建.htaccess 文件放到网站的根目录下,文件中的内容如下: RewriteEngine onRewriteCond %{REQUEST_FILENAM ...
- ActionBarSherlock学习笔记 第一篇——部署
ActionBarSherlock学习笔记 第一篇--部署 ActionBarSherlock是JakeWharton编写的一个开源框架,使用这个框架,可以实现在所有的Android ...
- linux网络相关命令使用
A,iptables使用示例 1,将请求80端口的包发送给本机8180端口(这样,别的机器访问本机的80端口时会被转发到8180端口去) iptables -t nat -A PREROUTING - ...
- TEX Quotes(字符串,水)
TEX Quotes Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 9674 Accepted: 5073 Descri ...
- nyoj-709-异形卵(水题)
异 形 卵 时间限制:1000 ms | 内存限制:65535 KB 难度: 描写叙述 我们探索宇宙,是想了解浩瀚星空的奥妙.但我们却非常少意识到宇宙深处藏匿的危急,它们无时无刻不紧盯着我们的地球 ...
- hdu 5007 水 弦
http://acm.hdu.edu.cn/showproblem.php?pid=5007 纯粹的联系String的substr 什么时候substr拦截比写短话 string te; int n; ...