RT-Thread can - STM32F103ZET6
SDK版本v4.0.2
目前,RT-Thread Studio还不能够自定义添加can设备。下面介绍手动添加过程:
使用RT-Thread Studio创建一个简单工程
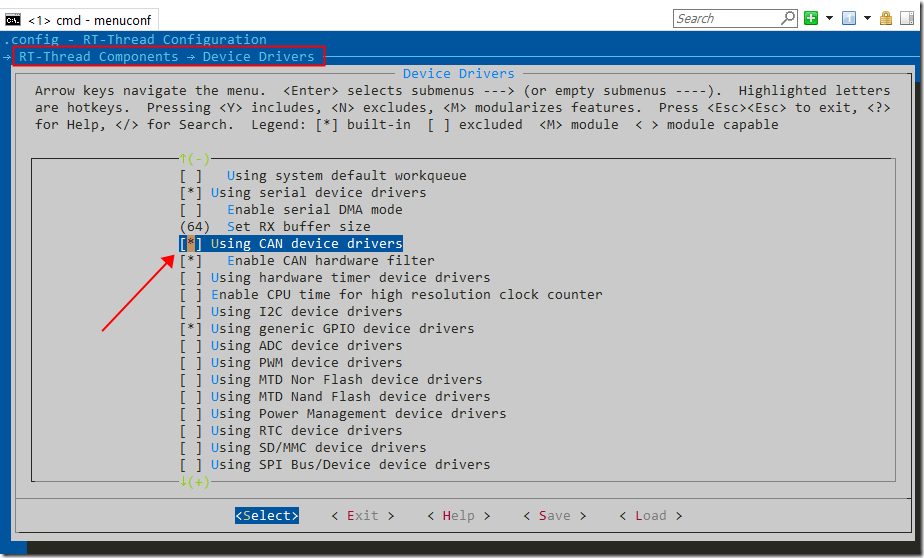
使用RT-Thread env工具添加CAN设备
保存以后,rtconfig.h配置文件会随之修改
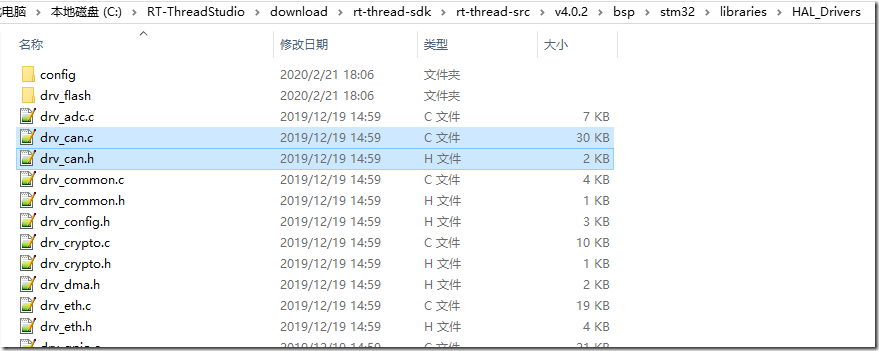
拷贝sdk中can样例到工程中
修改stm32f1xx_hal_conf.h文件
开启宏定义
#define HAL_CAN_MODULE_ENABLED
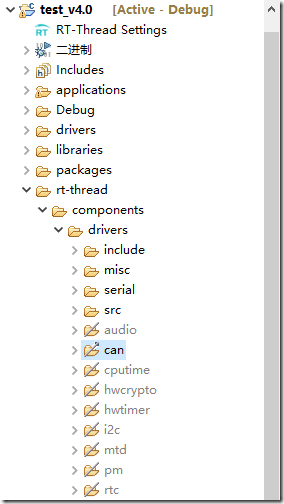
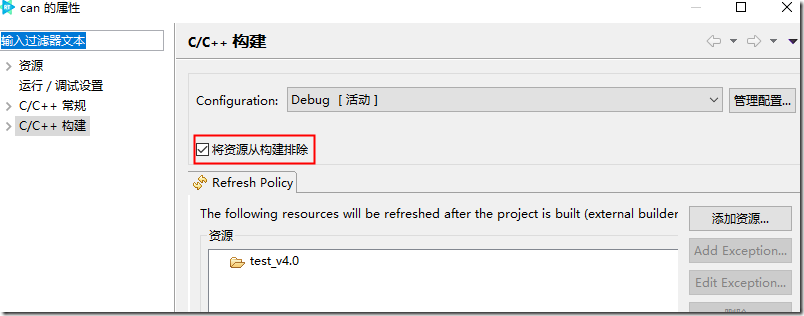
添加can实现到构建
默认可以看到是取消构建的,编译会报错
添加GPIO初始化
gpio不初始化,can打开始终是失败。系统会自动调用。
void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{
GPIO_InitTypeDef GPIO_InitStruct;
#ifdef BSP_USING_CAN1
if(canHandle->Instance==CAN1)
{
/* CAN1 clock enable */
__HAL_RCC_CAN1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE(); /**CAN1 GPIO Configuration
PA11 ------> CAN1_RX
PA12 ------> CAN1_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
#endif /* USING_BXCAN1 */ #ifdef BSP_USING_CAN2
if(canHandle->Instance==CAN2)
{
/* CAN2 clock enable */
__HAL_RCC_CAN2_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE(); /**CAN2 GPIO Configuration
PB12 ------> CAN2_RX
PB6 ------> CAN2_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
#endif /* USING_BXCAN2 */
}
源码地址如下:
https://github.com/zwx230741/rt_can.git
RT-Thread can - STM32F103ZET6的更多相关文章
- RT Thread 通过ENV来配置SFUD,操作SPI Flash
本实验基于正点原子stm32f4探索者板子 请移步我的RT Thread论坛帖子. https://www.rt-thread.org/qa/forum.php?mod=viewthread& ...
- STM32 + RT Thread OS 学习笔记[二]
串口通讯例程 通过上面的练习,对STM32项目开发有了一个直观印象,接下来尝试对串口RS232进行操作. 1. 目标需求: 开机打开串口1,侦听上位机(使用电脑串口测试软件)发送的信息,然后原样输 ...
- STM32 + RT Thread OS 串口通讯
1. 创建项目 a) 禁用Finsh和console b) 默认情况下,项目文件包含了finsh,它使用COM1来通讯,另外,console输出(rt_kprintf)也使用了COM1.因 ...
- STM32 + RT Thread OS 学习笔记[三]
RTGUI 据说RTGUI是多线程的,因此与RT-Thread OS的耦合度较高,有可能要访问RT-Thread的线程控制块.如果要移植到其它OS,估计难度较大.目前还处于Alpha状态,最终将会包含 ...
- STM32 + RT Thread OS 学习笔记[四]
1. 补注 a) 硬件,打通通讯通道 若学习者购买了学习板,通常可以在学习板提供的示例代码中找到LCD的相关驱动代码,基本上,这里的驱动的所有代码都可以从里面找到. 从上面的示意图可见,M ...
- RT thread 设备驱动组件之USART设备
本文以stm32f4xx平台介绍串口驱动,主要目的是:1.RTT中如何编写中断处理程序:2.如何编写RTT设备驱动接口代码:3.了解串行设备的常见处理机制.所涉及的主要源码文件有:驱动框架文件(usa ...
- RT Thread的SPI设备驱动框架的使用以及内部机制分析
注释:这是19年初的博客,写得很一般,理解不到位也不全面.19年末得空时又重新看了RTThread的SPI和GPIO,这次理解得比较深刻.有时间时再整理上传. -------------------- ...
- RT Thread SPI设备 使用
后记: 之前,我把SPI的片选在Cubemx中配置成了SPI_NSS.现在我给它改为了GPIO_OUTPUT. 同时参考了别人的类似的一个操作无线模块(采用SPI设备驱动)的例子程序(清楚了RTT的 ...
- 优先级反转实验,使用信号量实现【RT-Thread学习笔记 5】
RTOS中很经典的问题.就是在使用共享资源的时候,优先级低的进程在优先级高的进程之前执行的问题.这里模拟这种情况. 下面的实验模拟了优先级反转的情况: 先定义三个线程: //优先级反转实验 rt_se ...
- 线程让出实验【RT-Thread学习笔记 4】
API: rt_thread_yield 线程函数中调用,本线程释放MCU.如果此时有别的相同优先级的任务整处于等待状态,将获得MCU使用权. 线程让出就是给OS增加一个任务调度的机会. 创建两个线程 ...
随机推荐
- 创建dynamics CRM client-side (三) - Execution Context
Execution Context 在代码执行的时候定义了event context. 当form或者grid发生event时候传递了execution context. 可以在event hand ...
- wirkshark过滤规则
https://blog.csdn.net/wojiaopanpan/article/details/69944970
- tomcat+jenkins搭建持续化集成环境
一.下载安装Tomcat 1.进入官网http://tomcat.apache.org/ 2.解压缩文件到指定目录 3.设置环境变量 a.新建CATALINA_HOME b.在path中设置 %CAT ...
- [Java] The imoprt XXX cannot be resolved
不知道为什么突然报错,但是可以成功编译. 通过import一个未使用的包来消除error,猜测是插件的问题,具体原因未知. import 未使用的包后,error消失.
- innobackupex 恢复脚本
此脚本需要与我前几天写的备份脚本配套才能使用 这里也对innobackupex吐槽下,当使用innobackupex进行恢复的时候,必须要清除所有原数据文件,但是一旦恢复失败,则连实例都将丢失,不成功 ...
- map实现单词转换程序的例子
代码来源于c++ primer 10.3 功能:已知一个一一对应的词典,求一小段文档对应的“翻译” 词典如下: A a B b C c D d E e 输入: D D E 代码: //需要两个文件,一 ...
- Arduino系列之光照传感器(三)
今天,我将简单做一个当光照值低于某个值的时候,灯光自动打开,当高于某个值的时候,自动关闭. 设计代码原理: 首先,定义一个全局变量,并赋予初始值 然后,初始化程序 将设定某个IO口为输出模式 读取光度 ...
- 学习记录(安装Scala)
安装完spark之后根据教程安装Scala,在安装的时候提出警告,等了好长时间之后发现无法下载,最后搜索之后发现1.8版本的jdk无法安装,今天又重装了jdk换成了1.7.0的openjdk jdk安 ...
- CSS 故障艺术
本文的主题是 Glitch Art,故障艺术. 什么是故障艺术?我们熟知的抖音的 LOGO 正是故障艺术其中一种表现形式.它有一种魔幻的感觉,看起来具有闪烁.震动的效果,很吸引人眼球. 故障艺术它模拟 ...
- 聊聊“装箱”在CLR内部的实现
原文连接:https://mattwarren.org/2017/08/02/A-look-at-the-internals-of-boxing-in-the-CLR/ 作者 Matt Warren. ...