用LabVIEW做声源定位系统
前一阵子,研发部举办了为期三天的第一届Innovation Day,让大家用3天时间去完成工作之外的一些创意。有人做微信小程序,有人继续研究一些工作中用到的Tool,有人把一直想解决而没时间解决的老bug给解决掉。因为我最近忽然对室友新买的小度音响感兴趣,所以就研究了下声源定位。
言归正传,声源定位主要分为三种:
- 基于时延估计(time-delay estimation,TDE)的算法,也叫TDOA算法(Time Difference of Arrival);
- 基于高分辨率谱估计的算法;
- 基于稀疏表示的算法。
本文中使用的算法是第一种,基于时延估计的算法,这种算法最经典也比较简单,适合在两天半内搞定(第三天下午要写PPT给同事们讲+演示)。
TDOA算法
基于时延估计的算法,我参考了这篇文章:https://www.cnblogs.com/ytxwzqin/p/9004603.html,采用的是远场模型。
对于一个线性排列的麦克风阵列,声音到达不同的麦克风总会有时间先后顺序。
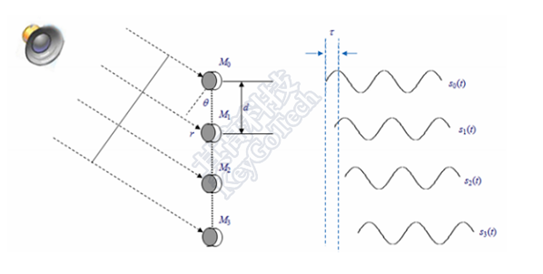
那么我们就可以通过计算2个麦克风采集信号的相位差,从而得到声音波束相对于两个麦克风的角度。具体的原理以及公式推理在前面的参考link里都有讲。

但是在真是的设备商运行算法的时候,就需要额外考虑一些情况,比如去混响、
硬件环境
正好我们做的新产品ELVIS III也发布了,和二代不同的是,它是基于ZYNQ的处理器架构,不再是一个DAQ设备,所以可以很轻易的通过网络来访问它。由于是教学产品,所以API的风格沿用了myRIO的风格,不过功能比起myRIO丰富了很多(毕竟贵嘛)。那么就用这个新产品作为采集信号的设备吧。
麦克风选的是淘宝便宜货,大概8块钱一个的麦克风套装,一共买了4个(连经理都看不下去觉得买的太便宜能做出来效果就见鬼了)。
硬件大概是这个样子的(上下两个MIC间隔8.5cm,左右两个MIC间隔也是8.5cm):
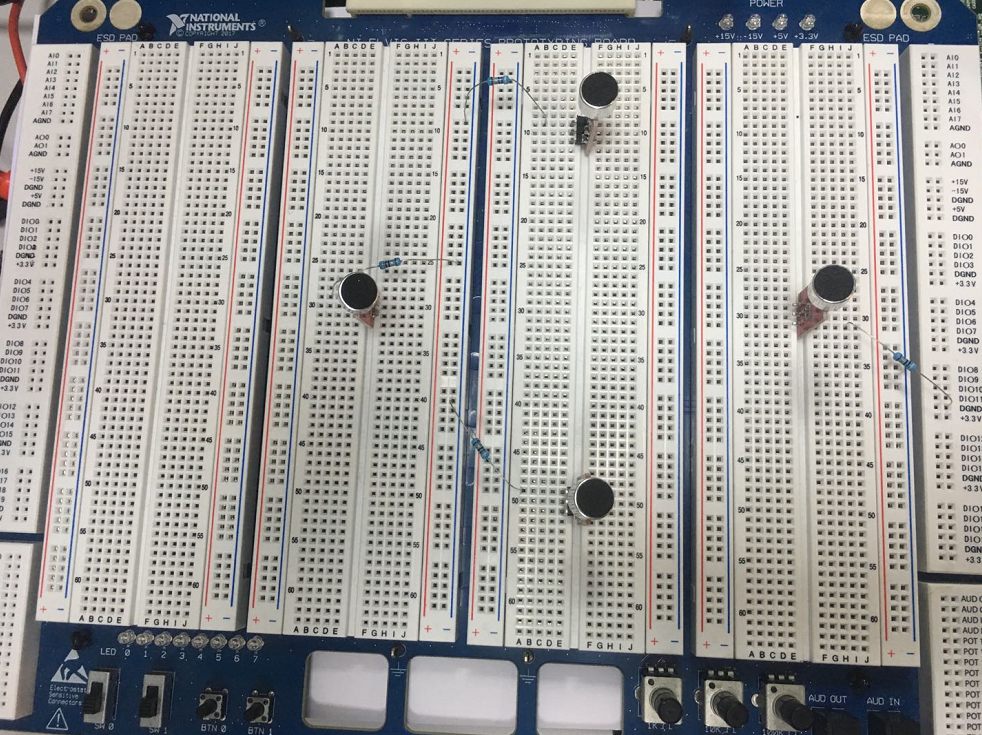
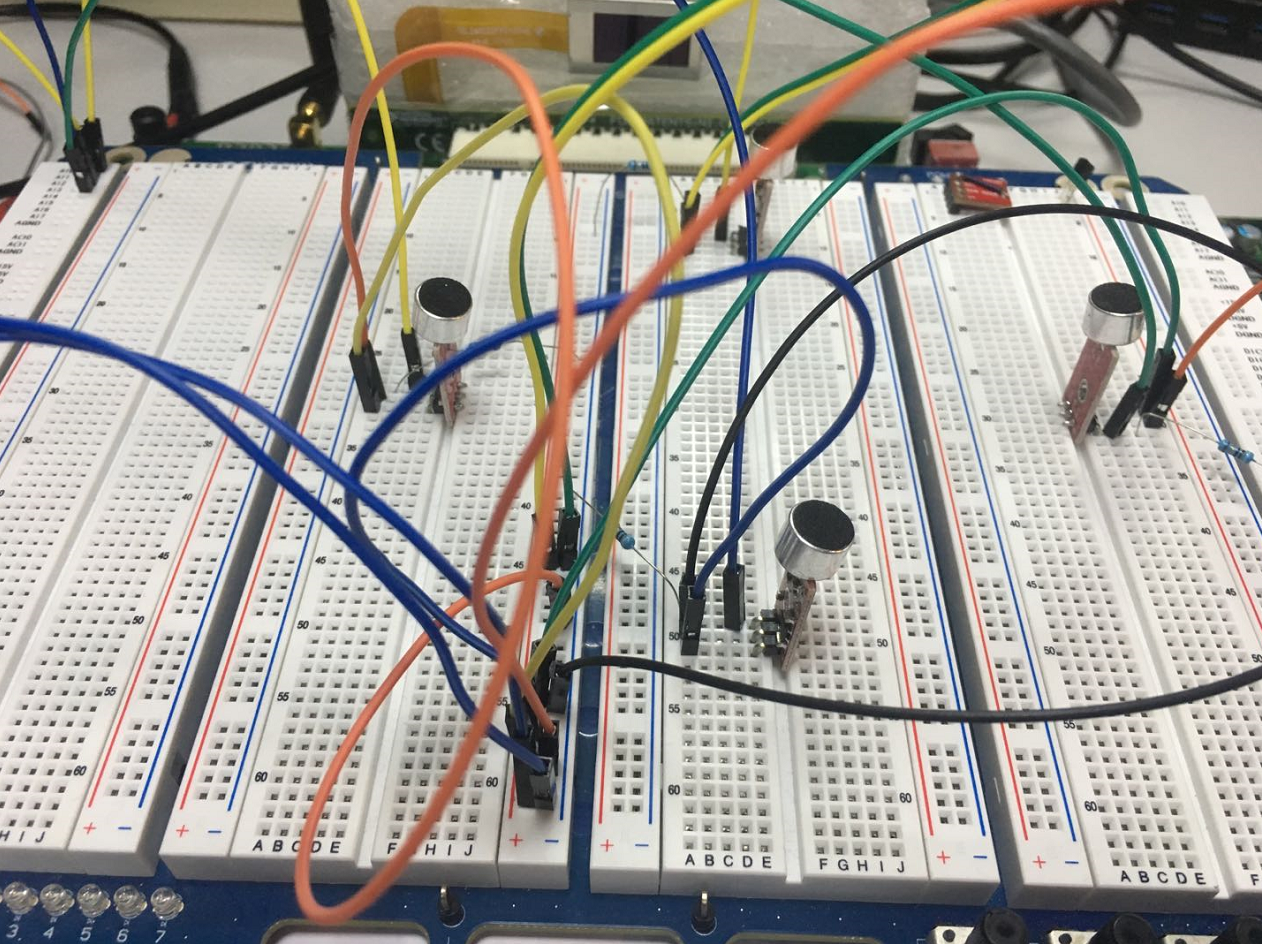
4个麦克风模块尽量组成一个矩形。由于MIC模块的输出阻抗和AI的输入阻抗不匹配,所以串联了一个电阻。由于每个MIC模块还需要连3.3V电源和GND,所以连完线,就成了这个样子:
将4个MIC的信号输出端口连接在ELVIS III的bank A的AI0-AI3,并采用N Sample方式来采集数据,采样率为44.1KHz,每次采集200ms进行计算。
实现
由于ELVIS III是基于Linux的设备,那么首先就考虑把信号采集+算法放在RT端(设备端)实现。
RT端实现
算法的框架并不复杂,采用生产者消费者的架构,由2个while loop来实现(一个loop不断的采集数据,另外一个loop不断地处理数据)。但是在实现过程中,遇到了一个最大的问题——RT上跑算法速度并不快,尤其是跑互相关算法很慢,完全没办法实时,所以此路不通。
PC+RT实现
那么换个思路,我们可以把信号采集的部分放在ELVIS III上面跑,然后利用PC强大的计算能力(i7-4790k, 32G内存)来做后面的算法处理。那么设备上只需要跑我们的采集数据的API,然后通过VI server以RPC的方式去返回数据给PC,然后PC再进行数据处理。
所以整个思路就变成这样:
- 用ELVIS III采集4个通道的MIC数据,采样率44.1KHz,采样时间200ms。然后讲采集到的数据返回给PC。
- PC端采集到完整的200ms数据后,就进行数据处理。
- 数据处理包括:
- 活动信号检测:把200ms原始信号滤波后,分成10份,分别计算其能量,当超过一定阈值的时候就认为有活动信号。
时延计算:这里取了个巧,用了声音与震动Toolkit里的一个现成的API,直接可以得到delay,不需要自己吭哧吭哧的再实现了
声音方位角计算:得到time delay,知道声速,也知道几个MIC的坐标,就可以用数学方法很容易的计算出角度了。
整个Main程序的后面板是这样子的:

可以看到,采用的依旧是生产者消费者模型,只不过数据采集已经是采用了RPC方式。所以只要ELVIS III和你的PC是同一个局域网,就可以远程的采集数据并处理。而且,你的这个程序是不需要Deploy到target上面去运行的,完全可以在Desktop环境下运行。
最终效果如下:
界面略微有点丑,效果就是在某个方向大喊一声,或者用力的拍一下手,可以显示出来方位。
用LabVIEW做声源定位系统的更多相关文章
- 基于麦克风阵列的声源定位算法之GCC-PHAT
目前基于麦克风阵列的声源定位方法大致可以分为三类:基于最大输出功率的可控波束形成技术.基于高分辨率谱图估计技术和基于声音时间差(time-delay estimation,TDE)的声源定位技术. 基 ...
- iOS 定位系统 知识
最近在做考勤定位系统 总结一些定位系统的知识. 后期会出一份算法主要攻克地球坐标和火星坐标转换的 1.关于百度的火星坐标定位策略 地图SDK/定位SDK的定位策略: WIFI + 基站 +GPS 三者 ...
- Python中导入第三方声源库Acoular的逻辑解释以及Acoular的下载
[声明]欢迎转载,但请保留文章原始出处→_→ 秦学苦练:http://www.cnblogs.com/Qinstudy/ 文章来源:http://www.cnblogs.com/Qinstudy/p/ ...
- LabVIEW上位机与串口通信
渊源 大一的时候,学校开了门公共选修课,叫LabVIEW编程,当时的我当然还不知道LabVIEW是啥东东,但还是选了.上课的老师是机械学院的一个副教授.他给我们展示了好几个用LabVIEW做的项目.譬 ...
- 从LabVIEW到C++
前言 最近一段时间一直没有更新,一方面是时间精力的问题(PS:懒癌犯了),另一方面是小黑大部分的时间都在学习C++相关知识,恶补了许多的知识(从大学C语言水平强制拔高了一段). 本文谈谈自己近期的一些 ...
- 【LabVIEW技巧】你可以不懂OOP,却不能不懂封装
前言 大多数写LabVIEW程序的工程师都不是一个纯软的工程师,很多做硬件的.做机械的.甚至学化学的也会学习LabVIEW. 由于主要重心不在软件,所以LabVIEW程序基本上能用行,也就得到入门容易 ...
- 语音跟踪:信号分解、锁相、鸡尾酒会效应、基于PR的信号分离
NLP中关于语音的部分,其中重要的一点是语音信号从背景噪音中分离.比如在一个办公室场景中,有白天的底噪-类似于白噪音的噪音.空调的声音.键盘的啪啪声.左手边45度7米元的地方同事讨论的声音.右手边1. ...
- 使用LabVIEWPC的制备
使用LabVIEWPC的制备 1.下载.安装LabVIEW 如今,互联网搜索,你可以搜索出一大推LabVIEW下载并安装破解教程.因此,这里没有具体描述的.请自行百度~~.另外.提醒一下,下载LabV ...
- labview--http协议数据交互
最近接了一个项目,需求是要将采集到的数据,以以下要求上报,并且提供接口供上层系统下发指令. 采用restful的http协议进行交互: 输入输出参数皆为json体. 响应包含三部分: Code:业务码 ...
随机推荐
- robotframework 文档
http://robotframework.org/robotframework/latest/RobotFrameworkUserGuide.html#post-processing-outputs
- 【转】Spring线程及线程池的使用
spring @Async 线程池使用 最近公司项目正逐渐从dubbo向springCloud转型,在本次新开发的需求中,全部使用springcloud进行,在使用时线程池,考虑使用spring封装的 ...
- 【转】Linux下的CPU使用率与服务器负载的关系与区别
当我们使用top命令查看系统的资源使用情况时会看到load average,如下图所示,它表示系统在1,5,15分钟的平均工作负载. 那么什么是负载(load)呢?它和CPU的利用率又有什么关系呢? ...
- Dubbo Filter机制概述
https://blog.csdn.net/prestigeding/article/details/82085705 从上文可知,在服务的调用或消费端发送请求命令中,Dubbo引入过滤器链机制来实 ...
- SoapUI: 从属性变量里面读取值, 把string 转换成arraylist
- android双进程守护,让程序崩溃后一定可以重启
由于我们做的是机器人上的软件,而机器人是24小时不间断服务的,这就要求我们的软件不能退出到系统桌面.当然最好是能够做到程序能够不卡顿,不崩溃,自己不退出.由于我们引用了很多第三方的开发包,也不能保证他 ...
- iOS逆向必备绝技之ipa重签名
一.重签名准备工作: 找到开发者证书和配置文件: 列出所有开发者证书文件: security find-identity -p codesigning -v 找一个开发环境配置文件生成entitlem ...
- scrapy中的Pipeline
当Item在Spider中被收集之后,它将会被传递到Item Pipeline,这些Item Pipeline组件按定义的顺序处理Item. 每个Item Pipeline都是实现了简单方法的Pyth ...
- Vue基础知识学习笔记
一.环境搭建1.安装nodejs ((https://nodejs.org/en/)2.安装脚手架 npm install --global vue-cli /cnmp install --globa ...
- 更换yum源为阿里云源
1.复制备份: cp /etc/yum.repos.d/CentOS-Base.repo /etc/yum.repos.d/CentOS-Base.repo.backup 2.下载: wget -O ...