[OpenCV] sift demo
运行环境:vs2012+opencv320
sift 需要的头文件为 <opencv2/xfeatures2d.hpp>
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp> using namespace cv;
using namespace std; bool refineMatchesWithHomography(
const std::vector<cv::KeyPoint>& queryKeypoints,
const std::vector<cv::KeyPoint>& trainKeypoints,
float reprojectionThreshold,
std::vector<cv::DMatch>& matches,
cv::Mat& homography)
{
const int minNumberMatchesAllowed = 8; if (matches.size() < minNumberMatchesAllowed)
return false; // Prepare data for cv::findHomography
std::vector<cv::Point2f> srcPoints(matches.size());
std::vector<cv::Point2f> dstPoints(matches.size()); for (size_t i = 0; i < matches.size(); i++) {
srcPoints[i] = trainKeypoints[matches[i].trainIdx].pt;
dstPoints[i] = queryKeypoints[matches[i].queryIdx].pt;
} // Find homography matrix and get inliers mask
std::vector<unsigned char> inliersMask(srcPoints.size());
homography = cv::findHomography(srcPoints, dstPoints, CV_FM_RANSAC,reprojectionThreshold, inliersMask); std::vector<cv::DMatch> inliers;
for (size_t i = 0; i < inliersMask.size(); i++) {
if (inliersMask[i])
inliers.push_back(matches[i]);
} matches.swap(inliers);
return matches.size() > minNumberMatchesAllowed;
} bool comp(vector<DMatch>& a,vector<DMatch>& b)
{
return a[0].distance/a[1].distance < b[0].distance/b[1].distance;
} void main()
{
Ptr<xfeatures2d::SIFT>feature=xfeatures2d::SIFT::create(); Mat input1 = imread("sift_img\\16.png",1);
Mat input2 = imread("sift_img\\11.png",1); vector<KeyPoint>kp1,kp2;
Mat des1,des2;
Mat output1,output2; feature->detectAndCompute(input1,cv::noArray(),kp1,des1);
drawKeypoints(input1,kp1,output1); feature->detectAndCompute(input2,cv::noArray(),kp2,des2);
drawKeypoints(input2,kp2,output2); vector<DMatch>matches;
vector<vector<DMatch> >Dmatches;
Ptr<cv::DescriptorMatcher> matcher_knn = new BFMatcher();
Ptr<cv::DescriptorMatcher> matcher = new BFMatcher(NORM_L2,true);
matcher->match(des1,des2,matches); matcher_knn->knnMatch(des1,des2,Dmatches,2);
sort(Dmatches.begin(),Dmatches.end(),comp); vector<DMatch> good;
for(int i=0;i<Dmatches.size();i++){
if(Dmatches[i][0].distance < 0.75*Dmatches[i][1].distance)
good.push_back(Dmatches[i][0]);
} Mat imResultOri;
drawMatches(output1, kp1, output2, kp2, matches, imResultOri,CV_RGB(0,255,0), CV_RGB(0,255,0)); Mat matHomo;
refineMatchesWithHomography(kp1, kp2, 3, matches, matHomo);
cout << "[Info] Homography T : " << endl << matHomo << endl; Mat imResult;
drawMatches(output1, kp1, output2, kp2, matches, imResult,CV_RGB(0,255,0), CV_RGB(0,255,0)); Mat Mgood;
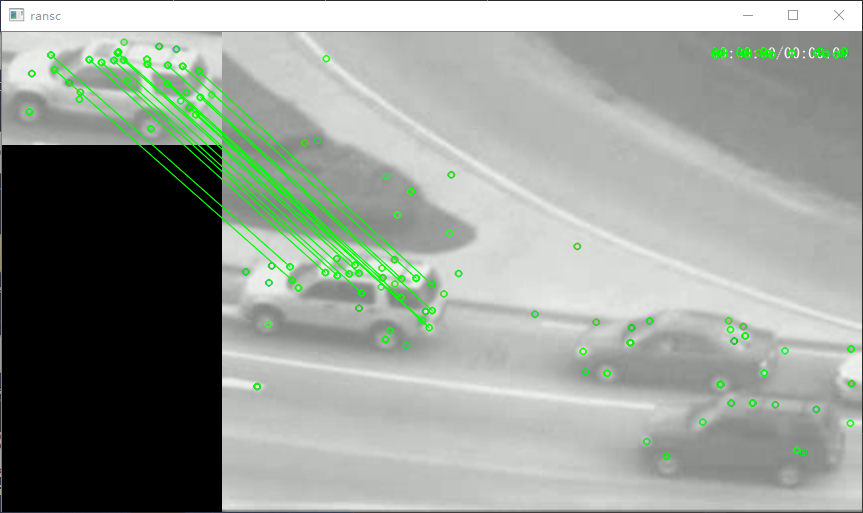
drawMatches(output1, kp1, output2, kp2, good, Mgood,CV_RGB(0,255,0), CV_RGB(0,255,0)); imshow("ransc",imResult);
imshow("knn_match",Mgood);
waitKey(0); return;
}
[OpenCV] sift demo的更多相关文章
- VS2010+Opencv+SIFT以及出现的问题-关于代码sift_3_c的说明
http://blog.sina.com.cn/s/blog_a6b913e30101dvrt.html 一.前提 安装Opencv,因该版本的SIFT是基于Opencv的. 下载SIFT源码,见Ro ...
- RPi 2B python opencv camera demo example
/************************************************************************************** * RPi 2B pyt ...
- Opencv Sift算子特征提取与匹配
SIFT算法的过程实质是在不同尺度空间上查找特征点(关键点),用128维方向向量的方式对特征点进行描述,最后通过对比描述向量实现目标匹配. 概括起来主要有三大步骤: 1.提取关键点: 2.对关键点附加 ...
- OpenCV SIFT原理与源码分析
http://blog.csdn.net/xiaowei_cqu/article/details/8069548 SIFT简介 Scale Invariant Feature Transform,尺度 ...
- python opencv SIFT,获取特征点的坐标位置
备注:SIFT算法的实质是在不同的尺度空间上查找关键点(特征点),并计算出关键点的方向.SIFT所查找到的关键点是一些十分突出,不会因光照,仿射变换和噪音等因素而变化的点,如角点.边缘点.暗区的亮点及 ...
- OpenCV——SIFT特征检测与匹配
SIFT特征和SURF特征比较 比较项目 SIFT SURF 尺度空间极值检测 使用高斯滤波器,根据不同尺度的高斯差(DOG)图像寻找局部极值 使用方形滤波器,利用海森矩阵的行列式值检测极值,并利用积 ...
- Opencv Sift和Surf特征实现图像无缝拼接生成全景图像
Sift和Surf算法实现两幅图像拼接的过程是一样的,主要分为4大部分: 1. 特征点提取和描述 2. 特征点配对,找到两幅图像中匹配点的位置 3. 通过配对点,生成变换矩阵,并对图像1应用变换矩阵生 ...
- opencv::sift特征提取
SIFT特征检测介绍 SIFT(Scale-Invariant Feature Transform)特征检测关键特性: -建立尺度空间,寻找极值 -关键点定位(寻找关键点准确位置与删除弱边缘) -关键 ...
- python+opencv+sift环境配置教程
最近在做对应点估计homography,需要用到opencv,c++的接口不如python的接口来的方便 但是在安装python接口的opencv的时候,遇到了各种问题,主要是函数找不到的问题 比如在 ...
随机推荐
- vscode设置VUE eslint开发环境
我的使用vscode开发VUE的常用设置 1.安装插件 ESLint Vetur Beautify Prettier - Code formatter Auto Rename Tag -重命名标签,闭 ...
- 关于rsa公钥格式的处理,一行纯内容进行换行格式化
最近在开发百度小程序,他的平台公钥是纯字符串,公钥的内容,没有rsa文件的头(-----BEGIN PUBLIC KEY-----)和尾部分-----END PUBLIC KEY----- 但是 PH ...
- 全网最新Kali Linux系统如何安装N卡驱动
转载请注明来源:全网最新Kali Linux系统如何安装N卡驱动[亲测-暗影精灵3-1050TI有效] - 大家好,我系渣渣辉 https://www.zzhsec.com/255.html 1.更换 ...
- 基于Kafka+ELK搭建海量日志平台
早在传统的单体应用时代,查看日志大都通过SSH客户端登服务器去看,使用较多的命令就是 less 或者 tail.如果服务部署了好几台,就要分别登录到这几台机器上看,等到了分布式和微服务架构流行时代,一 ...
- Mysql 原理以及常见mysql 索引等
## 主键 超键 候选键 外键 (mysql数据库常见面试题) 数据库之互联网常用架构方案 数据库之互联网常用分库分表方案 分布式事务一致性解决方案 MySQL Explain详解 ## 数据库事务的 ...
- Linux:sed
[参考文章]:shell中sed命令的用法 [参考文章]:SED 简明教程 1. 简述 sed是一种流编辑器,它是文本处理中非常重要的工具,能够完美的配合正则表达式使用. 执行命令时,一次处理一行内容 ...
- 删除顺序表L中下标为p(0<=p<=length-1)的元素,成功返回1,不成功返回0,并将删除元素的值赋给e
原创:转载请注明出处. [天勤2-2]删除顺序表L中下标为p(0<=p<=length-1)的元素,成功返回1,不成功返回0,并将删除元素的值赋给e 代码: //删除顺序表L中下标为p(0 ...
- PHP之Memcache和Memcached
本篇文章向大家介绍的是PHP中的Memcache和Memcached ,有兴趣的朋友可以看一下 **Memcache介绍:**Memcache是一套分布式缓存系统,分布式就是说可以在多台服务器上同时安 ...
- python实现并发服务器实现方式(多线程/多进程/select/epoll)
python实现并发服务器实现方式(多线程/多进程/select/epoll) 并发服务器开发 并发服务器开发,使得一个服务器可以近乎同一时刻为多个客户端提供服务.实现并发的方式有多种,下面以多进 ...
- pyCharm最新2017激活
pyCharm最新2017:下载地址 下载完成后安装软件 启动pyCharm,进入下面窗口 选择License server 在 server选项里边输入 http://elporfirio.com: ...