rbx1包里机器人仿真程序的实践
roslaunch rbx1_nav fake_move_base_map_with_obstacles.launch

不行,出错
一次只能朝向一个方向行走


rosrun rbx1_nav move_base_square.py
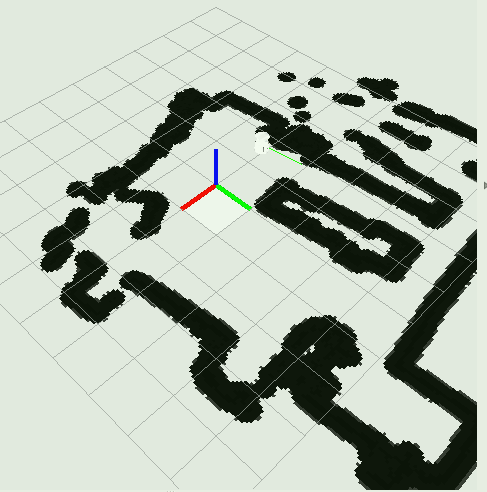
roslaunch rbx1_nav fake_amcl.launch map:=test_map.yaml

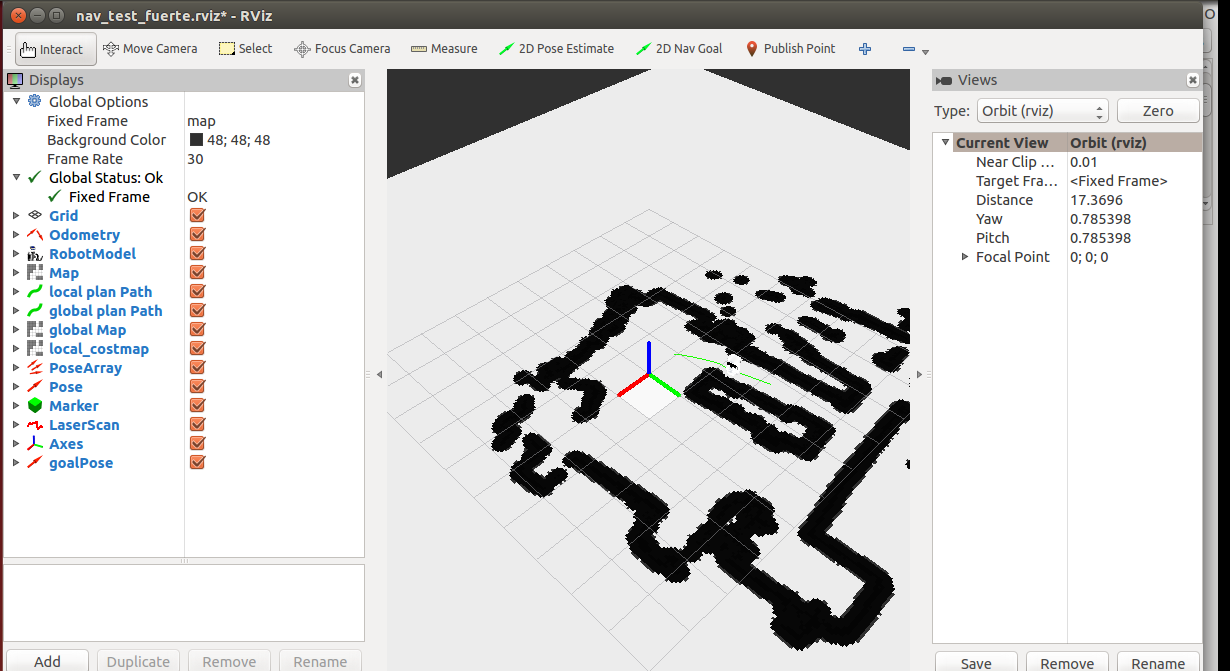
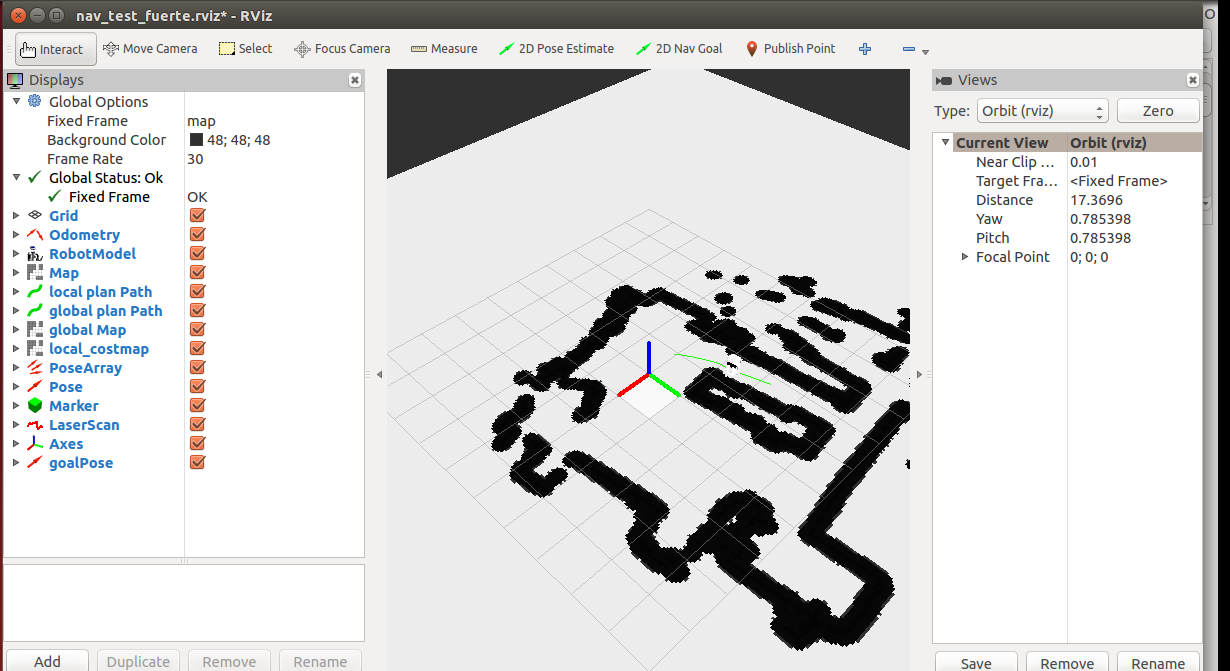
然后运行rviz
rosrun rviz rviz -d `rospack find rbx1_nav`/nav_fuerte.rviz


roslaunch rbx1_nav fake_amcl.launch map:=test_map.yaml
rosrun rviz rviz -d `rospack find rbx1_nav`/nav_fuerte.rviz




4.

rbx1包里机器人仿真程序的实践的更多相关文章
- [Android Pro] Android Support 包里究竟有什么
reference to : http://www.2cto.com/kf/201411/350928.html 随着 Android 5.0 Lollipop 的发布,Android 又为我们提供了 ...
- procps包里面的sysctl命令
procps包里面的sysctl命令 --http://www.cnblogs.com/createyuan/p/3740917.html?utm_source=tuicool&utm_med ...
- jar包里查找指定的class文件,排查是否存在或重复,工具软件:Java Class Finder
jar包里查找指定的class文件,排查是否存在或重复,工具软件:Java Class Finder 1,下载工具地址:www.idesksoft.com/classfinder.html,如图: 2 ...
- 直接修改别人jar包里面的class文件 工具:jclasslib
出于某些原因 需要把别人jar包里面的class修改一下信息 配置文件*.properties MANIFEST.MF 这些东西可以直接用记事本打开修改 然后替换掉就OK.. 在网上游荡了半天,没有找 ...
- 不安装rpm包,取出rpm包里的文件
1.查看rpm包里的文件 [root@VM_166_132 ~]# rpm -qlp mysql5.6.29-1-3.x86_64.rpm |more/etc/ld.so.conf.d/mysql-5 ...
- Java读取其他jar包里的配置文件
最近要做个东西,需要自己控制数据库的事物,项目封装的框架,实在是提不起去阅读的兴趣, 就想直接去读框架的底层实现里面的数据连接的配置文件(如:Url,port,username,password等), ...
- 更新jar包里的配置文件
更新jar包里的配置文件 起因 从笔记本传了个jar到服务器,运行的时候才发现配置文件一个ip项填错了.本来很简单的问题,maven重新打包就可以了,但是30多M的jar包就因为一个配置项错了又要重新 ...
- Java 操作jar包工具类以及如何快速修改Jar包里的文件内容
需求背景:写了一个实时读取日志文件以及监控的小程序,打包成了Jar包可执行文件,通过我们的web主系统上传到各个服务器,然后调用ssh命令执行.每次上传前都要通过解压缩软件修改或者替换里面的配置文件, ...
- C#调用java包里的方法
用IKVM,步骤: 下载ikvmbin-7.2.4630.5.zip,解压,把bin目录所在路径加到环境变量path里 2.电脑开始->CMD,输入ikvmc –out:”输出dll文件的路径” ...
随机推荐
- 由内省引出JavaBean的应用
IntroSpector-->javaBean-->特殊的java类 get和set方法 ReflectPoint pt1 = new ReflectPoint(3,5); String ...
- Android性能优化Google课程翻译一:Render----OverDraw实战
Context 近期实战了下OverDraw,加深了下理解.在上篇文章里Android性能优化Google课程翻译一:Render----OverDraw 写过详细方法. OverDraw解决方法离不 ...
- vue2.X 自定义 侧滑菜单 组件
1.vue2.0 封装 侧滑菜单组件 Sidebar.vue <!-- 侧滑菜单 组件 --> <template> <div> <transition na ...
- vue prop单向数据流
Prop 是单向绑定的:当父组件的属性变化时,将传导给子组件,但是反过来不会.这是为了防止子组件无意间修改了父组件的状态,来避免应用的数据流变得难以理解. 另外,每次父组件更新时,子组件的所有 pro ...
- asp.net模拟请求
在asp.net模拟请求,微软在控件状态有安全性控制. __VIEWSTATE.__EVENTVALIDATION要与服务端页面(.aspx)中元素信息保存一致.
- iOS开发 - "Cast from pointer to smaller type 'int' loses information” 解决的方法
今天要写一个联系人搜索算法. 百度了下, 在code4App中找到相关代码. 可是自己跑了下, 发现报错. 错误内容例如以下: "Cast from pointer to smaller t ...
- Lua学习五----------Lua循环
© 版权声明:本文为博主原创文章,转载请注明出处 1.循环类型 1.1 while循环 - 语法:while(condition) do ...<执行语句> end - 解析:判断cond ...
- 软件工程第2次作业——Visual Studio 2017下基于C/C++的VSTS单元测试实践
Write one minute, test all day long. 环境确定 IDE:Microsoft Visual Studio 2017 Community 语言:C++ 单元测试工具:V ...
- SQL Server 的collate的含义
什么叫排序规则呢?MS是这样描述的:"在 Microsoft SQL Server 2000 中,字符串的物理存储由排序规则控制.排序规则指定表示每个字符的位模式以及存储和比较字符所使用的规 ...
- CocoaPods Podfile详解与使用
1.为什么需要CocoaPods 在进行iOS开发的时候,总免不了使用第三方的开源库,比如SBJson.AFNetworking.Reachability等等.使用这些库的时候通常需要: 下载开源库的 ...