迁移学习(DANN)《Domain-Adversarial Training of Neural Networks》
论文信息
论文标题:Domain-Adversarial Training of Neural Networks
论文作者:Yaroslav Ganin, Evgeniya Ustinova, Hana Ajakan, Pascal Germain, Hugo Larochelle....
论文来源: JMLR 2016
论文地址:download
论文代码:download
引用次数:5292
1 Domain Adaptation
We consider classification tasks where $X$ is the input space and $Y=\{0,1, \ldots, L-1\}$ is the set of $L$ possible labels. Moreover, we have two different distributions over $X \times Y$ , called the source domain $\mathcal{D}_{\mathrm{S}}$ and the target domain $\mathcal{D}_{\mathrm{T}}$ . An unsupervised domain adaptation learning algorithm is then provided with a labeled source sample $S$ drawn i.i.d. from $\mathcal{D}_{\mathrm{S}}$ , and an unlabeled target sample $T$ drawn i.i.d. from $\mathcal{D}_{\mathrm{T}}^{X}$ , where $\mathcal{D}_{\mathrm{T}}^{X}$ is the marginal distribution of $\mathcal{D}_{\mathrm{T}}$ over $X$ .
$S=\left\{\left(\mathbf{x}_{i}, y_{i}\right)\right\}_{i=1}^{n} \sim\left(\mathcal{D}_{\mathrm{S}}\right)^{n}$
$T=\left\{\mathbf{x}_{i}\right\}_{i=n+1}^{N} \sim\left(\mathcal{D}_{\mathrm{T}}^{X}\right)^{n^{\prime}}$
with $N=n+n^{\prime}$ being the total number of samples. The goal of the learning algorithm is to build a classifier $\eta: X \rightarrow Y$ with a low target risk
$R_{\mathcal{D}_{\mathrm{T}}}(\eta)=\operatorname{Pr}_{(\mathbf{x}, y) \sim \mathcal{D}_{\mathrm{T}}}(\eta(\mathbf{x}) \neq y),$
while having no information about the labels of $\mathcal{D}_{\mathrm{T}}$ .
2 Domain Divergence
$d_{\mathcal{H}}\left(\mathcal{D}_{\mathrm{S}}^{X}, \mathcal{D}_{\mathrm{T}}^{X}\right)= 2 \text{sup}_{\eta \in \mathcal{H}}\left|\operatorname{Pr}_{\mathbf{x} \sim \mathcal{D}_{\mathrm{S}}^{X}}\; \;\; [\eta(\mathbf{x})=1]-\operatorname{Pr}_{\mathbf{x} \sim \mathcal{D}_{\mathrm{T}}^{X}} \; [\eta(\mathbf{x})=1]\right|$
该散度的意思是,在一个假设空间 $\mathcal{H}$ 中,找到一个函数 $\mathrm{h}$,使得 $\operatorname{Pr}_{x \sim \mathcal{D}}[h(x)=1]$ 的概率尽可能大,而 $\operatorname{Pr}_{x \sim \mathcal{D}^{\prime}}[h(x)=1]$ 的概率尽可能小。【如果数据来自源域,域标签为 $1$,如果数据来自目标域,域标签为 $0$】也就是说,用最大距离来衡量 $\mathcal{D}, \mathcal{D}^{\prime}$ 之间的距离。同时这个 $h$ 也可以理解为是用来尽可能区分 $\mathcal{D}$,$\mathcal{D}^{\prime}$ 这两个分布的函数。
可以通过计算来计算两个样本 $S \sim\left(\mathcal{D}_{\mathrm{S}}^{X}\right)^{n}$ 和 $T \sim\left(\mathcal{D}_{\mathrm{T}}^{X}\right)^{n^{\prime}}$ 之间的经验 $\text { H-divergence }$:
$\hat{d}_{\mathcal{H}}(S, T)=2\left(1- \underset{\eta \in \mathcal{H}}{\text{min}} \left[\frac{1}{n} \sum\limits_{i=1}^{n} I\left[\eta\left(\mathbf{x}_{i}\right)=0\right]+\frac{1}{n^{\prime}} \sum\limits _{i=n+1}^{N} I\left[\eta\left(\mathbf{x}_{i}\right)=1\right]\right]\right) \quad\quad(1)$
其中,$I[a]$ 是指示函数,当 $a$ 为真时,$I[a] = 1$,否则 $I[a] = 0$。
3 Proxy Distance
由于经验 $\mathcal{H}$-divergence 难以精确计算,可以使用判别源样本与目标样本的学习算法完成近似。
构造新的数据集 $U$ :
$U=\left\{\left(\mathbf{x}_{i}, 0\right)\right\}_{i=1}^{n} \cup\left\{\left(\mathbf{x}_{i}, 1\right)\right\}_{i=n+1}^{N}\quad\quad(2)$
使用 $\mathcal{H}$-divergence 的近似表示 Proxy A-distance(PAD),其中 $\epsilon$ 为 源域和目标域样本的分类泛化误差:
$\hat{d}_{\mathcal{A}}=2(1-2 \epsilon)\quad\quad(3)$
4 Method
为学习一个可以很好地从一个域推广到另一个域的模型,本文确保神经网络的内部表示不包含关于输入源(源或目标域)来源的区别信息,同时在源(标记)样本上保持低风险。
首先考虑一个标准的神经网络(NN)结构与一个单一的隐藏层。为简单起见,假设输入空间由 $m$ 维向量 $X=\mathbb{R}^{m}$ 构成。隐层 $G_{f}$ 学习一个函数 $G_{f}: X \rightarrow \mathbb{R}^{D}$ ,该函数将一个示例映射为一个 $\mathrm{d}$ 维表示,并由矩阵-向量对 $ (\mathbf{W}, \mathbf{b}) \in \mathbb{R}^{D \times m} \times \mathbb{R}^{D} $ 参数化:
$\begin{array}{l}G_{f}(\mathbf{x} ; \mathbf{W}, \mathbf{b})=\operatorname{sigm}(\mathbf{W} \mathbf{x}+\mathbf{b}) \\\text { with } \operatorname{sigm}(\mathbf{a})=\left[\frac{1}{1+\exp \left(-a_{i}\right)}\right]_{i=1}^{|\mathbf{a}|}\end{array}$
类似地,预测层 $G_{y}$ 学习一个函数 $G_{y}: \mathbb{R}^{D} \rightarrow[0,1]^{L}$,该函数由一对 $(\mathbf{V}, \mathbf{c}) \in \mathbb{R}^{L \times D} \times \mathbb{R}^{L}$:
$\begin{array}{l}G_{y}\left(G_{f}(\mathbf{x}) ; \mathbf{V}, \mathbf{c}\right)=\operatorname{softmax}\left(\mathbf{V} G_{f}(\mathbf{x})+\mathbf{c}\right)\\\text { with }\quad \operatorname{softmax}(\mathbf{a})=\left[\frac{\exp \left(a_{i}\right)}{\sum_{j=1}^{|a|} \exp \left(a_{j}\right)}\right]_{i=1}^{|\mathbf{a}|}\end{array}$
其中 $L=|Y|$。通过使用 softmax 函数,向量 $G_{y}\left(G_{f}(\mathbf{x})\right)$ 的每个分量表示神经网络将 $\mathbf{x}$ 分配给该分量在 $Y$ 中表示的类的条件概率。给定一个源样本 $\left(\mathbf{x}_{i}, y_{i}\right)$,使用正确标签的负对数概率:
$\mathcal{L}_{y}\left(G_{y}\left(G_{f}\left(\mathbf{x}_{i}\right)\right), y_{i}\right)=\log \frac{1}{G_{y}\left(G_{f}(\mathbf{x})\right)_{y_{i}}}$
对神经网络的训练会导致源域上的以下优化问题:
$\underset{\mathbf{W}, \mathbf{b}, \mathbf{V}, \mathbf{c}}{\text{min}} \left[\frac{1}{n} \sum_{i=1}^{n} \mathcal{L}_{y}^{i}(\mathbf{W}, \mathbf{b}, \mathbf{V}, \mathbf{c})+\lambda \cdot R(\mathbf{W}, \mathbf{b})\right]$
其中,$\mathcal{L}_{y}^{i}(\mathbf{W}, \mathbf{b}, \mathbf{V}, \mathbf{c})=\mathcal{L}_{y}\left(G_{y}\left(G_{f}\left(\mathbf{x}_{i} ; \mathbf{W}, \mathbf{b}\right) ; \mathbf{V}, \mathbf{c}\right), y_{i}\right)$,$R(\mathbf{W}, \mathbf{b})$ 是一个正则化项。
我们的方法的核心是设计一个直接从 Definition 1 的 $\mathcal{H}$-divergence 推导出的域正则化器。为此,我们将隐层 $G_{f}(\cdot)$($\text{Eq.4}$)的输出视为神经网络的内部表示。因此,我们将源样本表示法表示为
$S\left(G_{f}\right)=\left\{G_{f}(\mathbf{x}) \mid \mathbf{x} \in S\right\}$
类似地,给定一个来自目标域的未标记样本,我们表示相应的表示形式
$T\left(G_{f}\right)=\left\{G_{f}(\mathbf{x}) \mid \mathbf{x} \in T\right\}$
在 $\text{Eq.1}$ 的基础上,给出了样本 $S\left(G_{f}\right)$ 和 $T\left(G_{f}\right)$ 之间的经验 $\mathcal{H}\text{-divergence}$:
$\hat{d}_{\mathcal{H}}\left(S\left(G_{f}\right), T\left(G_{f}\right)\right)=2\left(1-\min _{\eta \in \mathcal{H}}\left[\frac{1}{n} \sum\limits_{i=1}^{n} I\left[\eta\left(G_{f}\left(\mathbf{x}_{i}\right)\right)=0\right]+\frac{1}{n^{\prime}} \sum\limits_{i=n+1}^{N} I\left[\eta\left(G_{f}\left(\mathbf{x}_{i}\right)\right)=1\right]\right]\right) \quad\quad(6)$
域分类层 $G_{d}$ 学习了一个逻辑回归变量 $G_{d}: \mathbb{R}^{D} \rightarrow[0,1]$ ,其参数为 向量-常量对 $(\mathbf{u}, z) \in \mathbb{R}^{D} \times \mathbb{R}$,它模拟了给定输入来自源域 $\mathcal{D}_{\mathrm{S}}^{X}$ 或目标域 $\mathcal{D}_{\mathrm{T}}^{X}$ 的概率:
$G_{d}\left(G_{f}(\mathbf{x}) ; \mathbf{u}, z\right)=\operatorname{sigm}\left(\mathbf{u}^{\top} G_{f}(\mathbf{x})+z\right)\quad\quad(7)$
因此,函数 $G_{d}(\cdot)$ 是一个域回归器。我们定义它的损失是:
$\mathcal{L}_{d}\left(G_{d}\left(G_{f}\left(\mathbf{x}_{i}\right)\right), d_{i}\right)=d_{i} \log \frac{1}{G_{d}\left(G_{f}\left(\mathbf{x}_{i}\right)\right)}+\left(1-d_{i}\right) \log \frac{1}{1-G_{d}\left(G_{f}\left(\mathbf{x}_{i}\right)\right)}$
其中,$d_{i}$ 表示第 $i$ 个样本的二进制域标签,如果 $d_{i}=0$ 表示样本 $\mathbf{x}_{i}$ 是来自源分布 $\mathbf{x}_{i} \sim \mathcal{D}_{\mathrm{S}}^{X}$),如果 $d_{i}=1$ 表示样本来自目标分布 $\mathbf{x}_{i} \sim \mathcal{D}_{\mathrm{T}}^{X} $。
回想一下,对于来自源分布($d_{i}=0$)的例子,相应的标签 $y_{i} \in Y$ 在训练时是已知的。对于来自目标域的例子,我们不知道在训练时的标签,而我们想在测试时预测这些标签。这使得我们能够在 $\text{Eq.5}$ 的目标中添加一个域自适应项,并给出以下正则化器:
$R(\mathbf{W}, \mathbf{b})=\underset{\mathbf{u}, z}{\text{max}} {}\left[-\frac{1}{n} \sum\limits _{i=1}^{n} \mathcal{L}_{d}^{i}(\mathbf{W}, \mathbf{b}, \mathbf{u}, z)-\frac{1}{n^{\prime}} \sum\limits_{i=n+1}^{N} \mathcal{L}_{d}^{i}(\mathbf{W}, \mathbf{b}, \mathbf{u}, z)\right]\quad\quad(8)$
其中,$\mathcal{L}_{d}^{i}(\mathbf{W}, \mathbf{b}, \mathbf{u}, z)=\mathcal{L}_{d}\left(G_{d}\left(G_{f}\left(\mathbf{x}_{i} ; \mathbf{W}, \mathbf{b}\right) ; \mathbf{u}, z\right), d_{i}\right)$ 。这个正则化器试图近似 $\text{Eq.6}$ 的 $\mathcal{H}\text{-divergence}$,因为 $2(1-R(\mathbf{W}, \mathbf{b}))$ 是 $\hat{d}_{\mathcal{H}}\left(S\left(G_{f}\right), T\left(G_{f}\right)\right)$ 的一个替代品。
为了学习,可以将 $\text{Eq.5}$ 的完整优化目标重写如下:
$\begin{array}{l}E(\mathbf{W}, \mathbf{V}, \mathbf{b}, \mathbf{c}, \mathbf{u}, z) \\\quad=\frac{1}{n} \sum\limits _{i=1}^{n} \mathcal{L}_{y}^{i}(\mathbf{W}, \mathbf{b}, \mathbf{V}, \mathbf{c})-\lambda\left(\frac{1}{n} \sum\limits_{i=1}^{n} \mathcal{L}_{d}^{i}(\mathbf{W}, \mathbf{b}, \mathbf{u}, z)+\frac{1}{n^{\prime}} \sum_{i=n+1}^{N} \mathcal{L}_{d}^{i}(\mathbf{W}, \mathbf{b}, \mathbf{u}, z)\right)\end{array}\quad\quad(9)$
对应的参数优化 $\hat{\mathbf{W}}$, $\hat{\mathbf{V}}$, $\hat{\mathbf{b}}$, $\hat{\mathbf{c}}$, $\hat{\mathbf{u}}$, $\hat{z}$:
$\begin{array}{l}(\hat{\mathbf{W}}, \hat{\mathbf{V}}, \hat{\mathbf{b}}, \hat{\mathbf{c}}) & =& \underset{\mathbf{W}, \mathbf{V}, \mathbf{b}, \mathbf{c}}{\operatorname{arg min}} E(\mathbf{W}, \mathbf{V}, \mathbf{b}, \mathbf{c}, \hat{\mathbf{u}}, \hat{z}) \\(\hat{\mathbf{u}}, \hat{z}) & =&\underset{\mathbf{u}, z}{\operatorname{arg max}} E(\hat{\mathbf{W}}, \hat{\mathbf{V}}, \hat{\mathbf{b}}, \hat{\mathbf{c}}, \mathbf{u}, z)\end{array}$

Generalization to Arbitrary Architectures
分类损失和域分类损失:
$\begin{aligned}\mathcal{L}_{y}^{i}\left(\theta_{f}, \theta_{y}\right) & =\mathcal{L}_{y}\left(G_{y}\left(G_{f}\left(\mathbf{x}_{i} ; \theta_{f}\right) ; \theta_{y}\right), y_{i}\right) \\\mathcal{L}_{d}^{i}\left(\theta_{f}, \theta_{d}\right) & =\mathcal{L}_{d}\left(G_{d}\left(G_{f}\left(\mathbf{x}_{i} ; \theta_{f}\right) ; \theta_{d}\right), d_{i}\right)\end{aligned}$
优化目标:
$E\left(\theta_{f}, \theta_{y}, \theta_{d}\right)=\frac{1}{n} \sum\limits_{i=1}^{n} \mathcal{L}_{y}^{i}\left(\theta_{f}, \theta_{y}\right)-\lambda\left(\frac{1}{n} \sum\limits_{i=1}^{n} \mathcal{L}_{d}^{i}\left(\theta_{f}, \theta_{d}\right)+\frac{1}{n^{\prime}} \sum\limits_{i=n+1}^{N} \mathcal{L}_{d}^{i}\left(\theta_{f}, \theta_{d}\right)\right) \quad\quad(10)$
对应的参数优化 $\hat{\theta}_{f}$, $\hat{\theta}_{y}$, $\hat{\theta}_{d}$:
$\begin{array}{l}\left(\hat{\theta}_{f}, \hat{\theta}_{y}\right) & =&\underset{\theta_{f}, \theta_{y}}{\operatorname{argmin}} E\left(\theta_{f}, \theta_{y}, \hat{\theta}_{d}\right) \quad\quad(11) \\\hat{\theta}_{d} & =&\underset{\theta_{d}}{\operatorname{argmax}} E\left(\hat{\theta}_{f}, \hat{\theta}_{y}, \theta_{d}\right)\quad\quad(12)\end{array}$
如前所述,由 $\text{Eq.11-Eq.12}$ 定义的鞍点可以作为以下梯度更新的平稳点找到:
$\begin{array}{l}\theta_{f} \longleftarrow \theta_{f}-\mu\left(\frac{\partial \mathcal{L}_{y}^{i}}{\partial \theta_{f}}-\lambda \frac{\partial \mathcal{L}_{d}^{i}}{\partial \theta_{f}}\right)\quad\quad(13) \\\theta_{y} \longleftarrow \quad \theta_{y}-\mu \frac{\partial \mathcal{L}_{y}^{i}}{\partial \theta_{y}}\quad\quad\quad\quad \quad\quad(14) \\\theta_{d} \quad \longleftarrow \quad \theta_{d}-\mu \lambda \frac{\partial \mathcal{L}_{d}^{i}}{\partial \theta_{d}}\quad\quad\quad\quad(15) \\\end{array}$
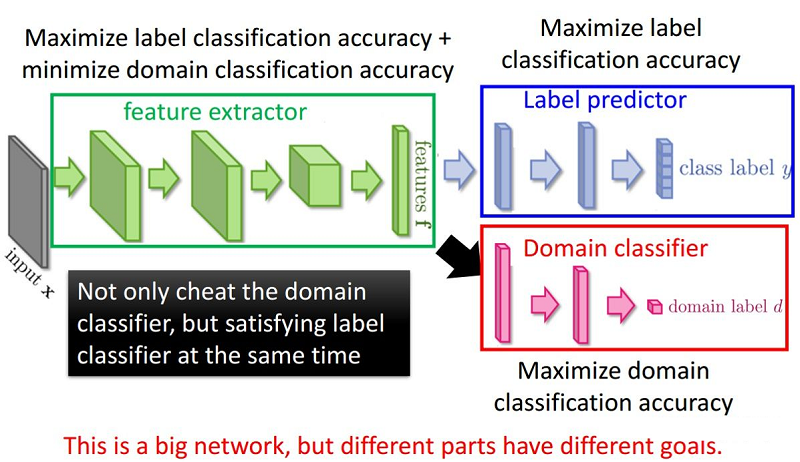
整体框架:

组件:
- 特征提取器(feature extractor)$G_{f}\left(\cdot ; \theta_{f}\right)$ :将源域样本和目标域样本进行映射和混合,使域判别器无法区分数据来自哪个域;提取后续网络完成任务所需要的特征,使标签预测器能够分辨出来自源域数据的类别;
- 标签预测器(label predictor)$G_{y}\left(\cdot ; \theta_{y}\right)$:对 Source Domain 进行训练,实现数据的分类任务,本文就是让 Source Domain 的图片分类越正确越好;
- 域分类器(domain classifier)$G_{d}\left(\cdot ; \theta_{d}\right)$:二分类器,要让 Domain 的分类越正确越好,分类出是 Source 还是 Target ;
为什么要加梯度反转层:GRL?
域分类器和特征提取器中间有一个梯度反转层(Gradient reversal layer)。梯度反转层顾名思义将梯度乘一个负数,然后进行反向传播。加入GRL的目的是为了让域判别器和特征提取器之间形成一种对抗。
最大化 loss $L_{d}$ ,这样就可以尽可能的让两个 domain 分不开, feature 自己就渐渐趋于域自适应了。这是使用 GRL 来实现的,loss $L_{d}$ 在 domain classifier 中是很小的,但通过 GRL 后,就实现在 feature extractor 中不能正确的判断出信息来自哪一个域。
迁移学习(DANN)《Domain-Adversarial Training of Neural Networks》的更多相关文章
- Training Deep Neural Networks
http://handong1587.github.io/deep_learning/2015/10/09/training-dnn.html //转载于 Training Deep Neural ...
- Training (deep) Neural Networks Part: 1
Training (deep) Neural Networks Part: 1 Nowadays training deep learning models have become extremely ...
- Quantization aware training 量化背后的技术——Quantization and Training of Neural Networks for Efficient Integer-Arithmetic-Only Inference
1,概述 模型量化属于模型压缩的范畴,模型压缩的目的旨在降低模型的内存大小,加速模型的推断速度(除了压缩之外,一些模型推断框架也可以通过内存,io,计算等优化来加速推断). 常见的模型压缩算法有:量化 ...
- 深度学习笔记(三 )Constitutional Neural Networks
一. 预备知识 包括 Linear Regression, Logistic Regression和 Multi-Layer Neural Network.参考 http://ufldl.stanfo ...
- 深度学习基础(四) Dropout_Improving neural networks by preventing co-adaptation of feature detectors
该笔记是我快速浏览论文后的记录,部分章节并没有仔细看,所以比较粗糙. 从摘要中可以得知,论文提出在每次训练时通过随机忽略一半的feature detectors(units)可以极大地降低过拟合.该方 ...
- 【DeepLearning学习笔记】Coursera课程《Neural Networks and Deep Learning》——Week2 Neural Networks Basics课堂笔记
Coursera课程<Neural Networks and Deep Learning> deeplearning.ai Week2 Neural Networks Basics 2.1 ...
- 【DeepLearning学习笔记】Coursera课程《Neural Networks and Deep Learning》——Week1 Introduction to deep learning课堂笔记
Coursera课程<Neural Networks and Deep Learning> deeplearning.ai Week1 Introduction to deep learn ...
- CVPR 2018paper: DeepDefense: Training Deep Neural Networks with Improved Robustness第一讲
前言:好久不见了,最近一直瞎忙活,博客好久都没有更新了,表示道歉.希望大家在新的一年中工作顺利,学业进步,共勉! 今天我们介绍深度神经网络的缺点:无论模型有多深,无论是卷积还是RNN,都有的问题:以图 ...
- Training spiking neural networks for reinforcement learning
郑重声明:原文参见标题,如有侵权,请联系作者,将会撤销发布! 原文链接:https://arxiv.org/pdf/2005.05941.pdf Contents: Abstract Introduc ...
- Unsupervised Domain Adaptation Via Domain Adversarial Training For Speaker Recognition
年域适应挑战(DAC)数据集的实验表明,所提出的方法不仅有效解决了数据集不匹配问题,而且还优于上述无监督域自适应方法.
随机推荐
- vscode删除卸载残余
1.删除安装插件C:/User/XXX/.vscode2.删除用户信息和缓存信息C:/User/XXX/AppData/Roaming/CodeC:/User/XXX/AppData/Roaming/ ...
- 【单片机入门】(三)应用层软件开发的单片机学习之路-----UART串口通讯和c#交互
引言 在第一章博客中,我们讲了Arduino对Esp32的一个环境配置,以及了解到了常用的一个总线通讯协议,其中有SPI,IIC,UART等,今天我为大家带来UART串口通讯和c#串口进行通讯的一个案 ...
- 如何在.NET程序崩溃时自动创建Dump?
今天在浏览张队转载文章的留言时,遇到一个读者问了这样的问题,如下图所示: 首先能明确的一点是"程序崩溃退出了是不能用常规的方式dump的",因为整个进程树都已经退出.现场已经无法使 ...
- FastAPI + tortoise-orm基础使用
更改sqlite为mysql from tortoise import Tortoise import asyncio async def init(): user = 'root' password ...
- adb 安装与使用
什么是adb adb 是有个通用命令行工具 他允许您与模拟器实例或者链接的Android设备进行通信,他可为各种设备操作提供便利,比如安装和调试应用 启动adb 服务在命令行中输入adb start- ...
- 2022极端高温!机器学习如何预测森林火灾?⛵ 万物AI
作者:ShowMeAI编辑部 声明:版权所有,转载请联系平台与作者并注明出处 收藏ShowMeAI查看更多精彩内容 今年夏天,重庆北碚区山火一路向国家级自然保护区缙云山方向蔓延.为守护家园,数万名重庆 ...
- 如何在JavaScript中使用for循环
前言 循环允许我们通过循环数组或对象中的项并做一些事情,比如说打印它们,修改它们,或执行其他类型的任务或动作.JavaScript有各种各样的循环,for循环允许我们对一个集合(如数组)进行迭代. 在 ...
- AR路由器如何配置Portal认证(二层网络)
规格 适用于所有版本.所有形态的AR路由器. 说明: 4GE-2S.4ES2G-S.4ES2GP-S和9ES2单板不支持NAC功能. 组网需求 如图所示,某公司接待室需要部署一套身份认证系统,对接入网 ...
- 随笔——mvc公众号自动登录跳转到原页面的方法
页面路径传参跳到那带到哪 1.全局过滤(继承过滤也行).这里使用的全局过滤 2.过滤判断需要登录的话,获取本次路径传到登录的页面 3.登录的页面判断是微信浏览器的话,参数带到微信登录接口 4.微信登录 ...
- Fastjsonfan反序列化(一)
前置知识 Fastjson 是一个 Java 库,可以将 Java 对象转换为 JSON 格式,当然它也可以将 JSON 字符串转换为 Java 对象. Fastjson 可以操作任何 Java 对象 ...