树莓派安装ros
之前电脑安装过ros感觉还好,没成想这次在树莓派上安装费老劲了,出现了很多错误,装了卸,卸了装废了半天劲下面将一些安装的错误和问题做个总结方便以后的安装也希望给别人一个参考
ros安装(对照自己的版本,我的是melodic)
国内源
下面两个都可以
网络问题
无线网络
树莓派连接wifi的方法
首先使用sudo iwconfig wlan0 up 启动无线网络:
树莓派安装ubuntu后命令行直接连接WIFI
在Ubuntu中使用命令连接wifi
以太网
树莓派安装Ubuntu18.04和ROS(没有屏幕也能安装)这篇文章中介绍了使用电脑共享网络使树莓派联网的方式
安装ros中的问题
sudo ros init错误问题
来自:Ubuntu18.04 melodic 安装与下载ROS(超详细教程)
错误类型1:

解决办法1
打开hosts文件
sudo gedit /etc/hosts
#在文件末尾添加
151.101.84.133 raw.githubusercontent.com
#保存后退出再尝试
解决办法2
sudo c_rehash /etc/ssl/certs
sudo -E rosdep init
rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml]:
<urlopen error _ssl.c:495: The handshake operation timed out> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml)
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
ERROR: error loading sources list:
The read operation timed out
reading in sources list data from /etc/ros/rosdep/sources.list.d
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml]:
<urlopen error _ssl.c:495: The handshake operation timed out> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml)
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
ERROR: error loading sources list:
The read operation timed out
运行:(网络换成手机热点,如果是time out,那就多尝试几次) 如果还是提示错误,请将源更更换为清华源,然后sudo apt update (请将网络换成手机热点) rosdep update出错
sudo apt-get update
sudo apt-get install python-rosdep
错误类型2:
这个问题原因在于,20-default.list在你的系统中已经存在,删除掉:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
再次尝试
sudo rosdep init
rosdep update问题
可以尝试使用电脑/树莓派连接手机热点来rosdep update
不行可以参考下面步骤,很有效
来自:rosdep update 超时失败2021最新解决方法
2021最新解决方法
但近期,通过修改hosts文件解决rosdep update失败的方法也不太好用了,成功几率很低。
参考 leida_wt 的方法,网站https://ghproxy.com/支持github的资源代理,非常好用,我们将用此代理加速rosdep对Github的访问,进而解决rosdep update失败问题。
我们要做的,是在rosdep的若干个脚本文件中,把 https://ghproxy.com/ 添加到相应URL前面即可。
注:修改各个文件前以防万一可以线备份一下 ,例如:
sudo cp /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py_backup
注:这些文件的属性时只读 可以使用 chmod命令改变文件属性,例如:
sudo chmod 777 sudo cp /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py_backup
下面开始操作
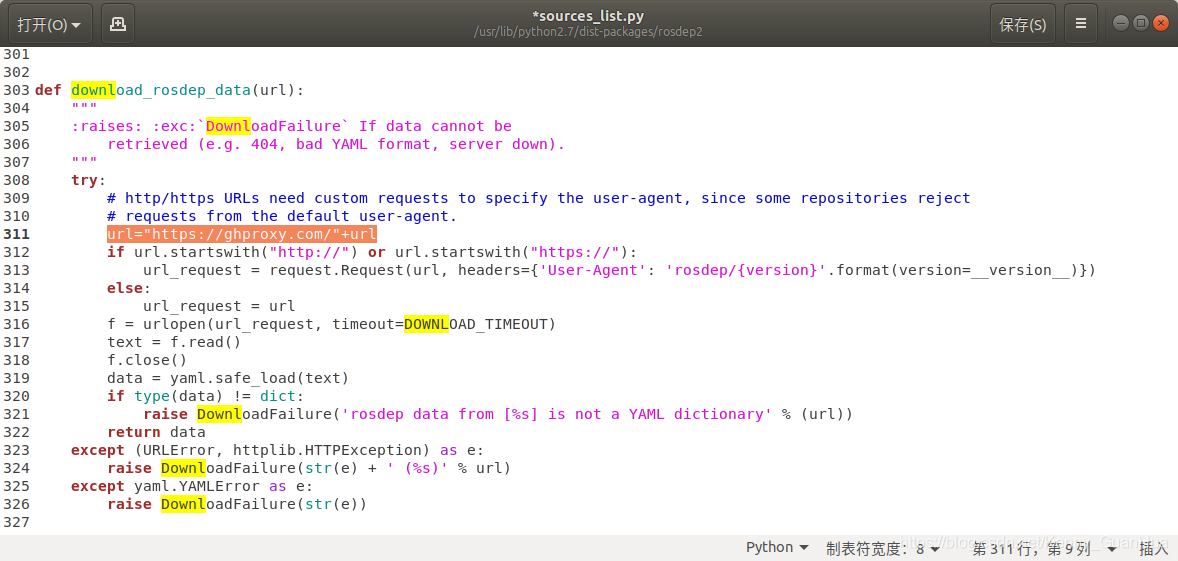
1.首先 修改rosdep下载资源的脚本文件:/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py,把以下行添加到脚本中的download_rosdep_data()函数中,以应用代理服务:
url="https://ghproxy.com/"+url
2.然后,用同样的方法修改/usr/lib/python2.7/dist-packages/rosdistro/__init__.py里面的DEFAULT_INDEX_URL参数,如下:
DEFAULT_INDEX_URL = 'https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
3.接着,以下4个文件中也使用了“raw.githubusercontent.com”网址,同样的方法把“https://ghproxy.com/”添加到网址前:
/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py 36行
/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py 72行
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py 39行
/usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py 68行 119行
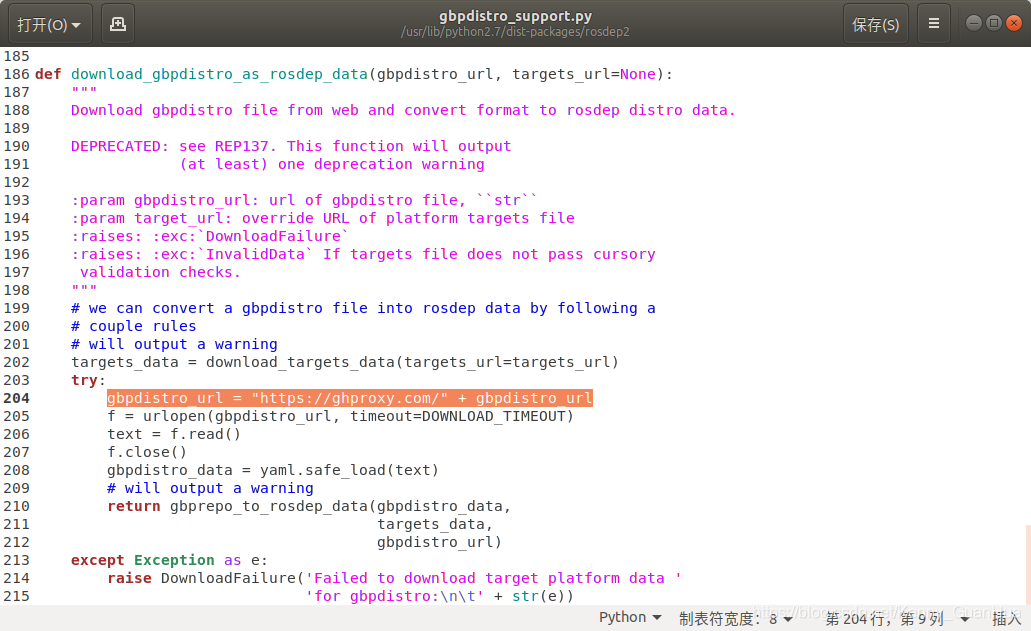
4.最后,在 /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py 的第204行添加如下代码:
gbpdistro_url = "https://ghproxy.com/" + gbpdistro_url
大功告成,现在你可以愉快地执行 rosdep update 啦!预祝一把过。
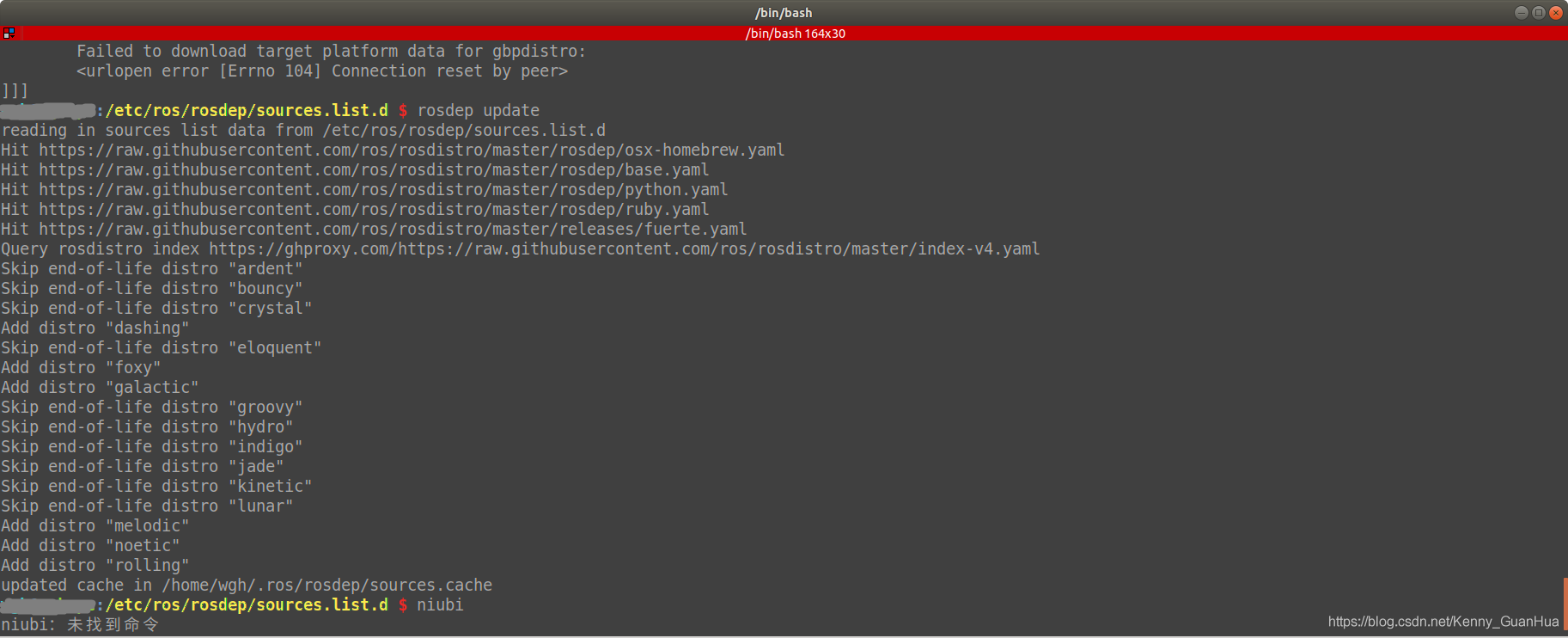
除此之外古月居中的方法也应该没问题,但是我还没试,我是用上面的方式就成功了
rosdep init/rosdep update error:timeout
希望这些参考文章能帮助你安装成,祝您使用愉快
树莓派安装ros的更多相关文章
- 树莓派3安装ros
树莓派3上面安装ros总结参考wiki和诸多博客安装ros仍然遇到了很多问题,重装了好几遍才成功,为了自己和其他人以后再安装ros时,不在重蹈覆辙.1.准备和说明树莓派3,安装系统Raspbian j ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- Ubuntu安装 Docker CE,VNC访问docker图形界面并安装ROS
从包安装 如果您无法使用Docker的存储库来安装Docker CE,则可以下载.deb适用于您的发行版的 文件并手动安装.每次要升级Docker CE时都需要下载新文件. 安装Docker CE,将 ...
- 新树莓派系统安装ROS记录
树莓派系统更新了,作为版本控的我怎么能忍住不更新系统,为了提高系统的速度,买了张170M的告诉sd卡,我要说的是,这个高速SD卡的钱花的最值得了,千万不要觉得树莓派都买了4,还要什么高速SD卡(自行车 ...
- ubuntu14上安装ros教程
安装ROS 官方的安装教程地址 http://wiki.ros.org/cn/jade/Installation/Ubuntu 建议安装indigo版的 下面的教程是安装jade版的 配置Ubuntu ...
- Raspberry PI(树莓派)安装ZMAP
以前配置树莓派安装ZMAP一直没有装成功,今天又试了下,装成功了,记录下. Good Job. Zmap地址: https://zmap.io/documentation.html step1: gi ...
- 树莓派安装ftp服务器
在树莓派安装ftp服务器,可上载\下载文件 vsftpd是开源的轻量级的常用ftp服务器. 1,安装vsftpd服务器 (约400KB)sudo apt-get install vsftpd 2,启动 ...
- ROS_Kinetic_01 在ubuntu 16.04安装ROS Kinetic 2017.01更新
ROS_Kinetic系列学习(一),在ubuntu 16.04安装ROS Kinetic. Celebrating 9 Years of ROS! ubuntu16.04已经发布半年多了,ROS的K ...
- TX2 安装 ROS 依赖库错误解决办法
一.更换ubuntu 16.04 更新源 1. 更新源 deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main multiverse rest ...
随机推荐
- oracle 12c RAC 重启
转至:https://blog.csdn.net/weixin_40283570/article/details/81511072 关闭顺序 :关闭PDB----->关闭数据库------> ...
- Linux的用户与用户组管理
1.Linux用户与用户组 Linux 是多用户多任务操作系统,Linux 系统支持多个用户在同一时间内登陆,不同用户可以执行不同的任务,并且互不影响.不同用户具有不问的权限,毎个用户在权限允许的范围 ...
- JZ-020-包含 min 函数的栈
包含 min 函数的栈 题目描述 定义栈的数据结构,请在该类型中实现一个能够得到栈中所含最小元素的min函数(时间复杂度应为O(1)). 题目链接: 包含 min 函数的栈 代码 import jav ...
- windows下安装gym
安装gym在执行pip install -e'.[all]'这句语句时,可能会出现这种情况 在pycharm中运行的时候会出现如下这种情况: 或者这种情况 出现这种问题可能是python的版本太高了, ...
- application.properties文件常用配置
项目一直在用properties文件写配置,因为配置不是自己来写所以也从来没有研究过各个配置的含义,所以对很多配置也是一知半解,只是知道可以这样用,但是不知道为什么能这样用.自己抽空找了一下资料做个记 ...
- 制作自己的rpm包,并为其制作patch包。
本文分为两个部分,第一部分是制作一个简单的自己的rpm包,并安装运行它.第二部分是为其制作一个patch包,并通过spec配置文件去打补丁,安装.运行打补丁后的程序. 一.安装工具 [yh@local ...
- VMWare ESXi 6.0如何复制虚拟机
1.复制前建议将待复制的虚拟机电源关闭. 2.登录ESXi 6.0主机后,点击"配置"选项卡,再点击"存储器". 3.能看得相关的数据存储,然后右键点击存储器如 ...
- MYSQL如何在创建表时添加判断条件
大家好,我是小皓. 一.背景 今天在博主练习MYS创建表操作时遇到一个语法报错,就想着来和大家分享一下MYSQL如何在创建表时添加判断条件: ERROR 1064 (42000): You have ...
- 最小生成树MST算法(Prim、Kruskal)
最小生成树MST(Minimum Spanning Tree) (1)概念 一个有 n 个结点的连通图的生成树是原图的极小连通子图,且包含原图中的所有 n 个结点,并且有保持图连通的最少的边,所谓一个 ...
- 阿里云镜像站DNS——Chrome配置方法
镜像下载.域名解析.时间同步请点击 阿里巴巴开源镜像站 DNS 简介 域名系统(服务)协议(DNS)是一种分布式网络目录服务,主要用于域名与 IP 地址的相互转换,以及控制因特网的电子邮件的发送. 阿 ...