RepPointsV2:更多的监督任务,更强的性能 | NIPS 2020
RepPointsV2的整体思想类似与Mask R-CNN,加入更多的任务来监督目标检测算法的学习。虽然在创新性上可能不够新颖,但论文的通用性还是很不错的,而且将角点任务的输出用于联合推理,从对比实验上看提升不少
来源:晓飞的算法工程笔记 公众号
论文: RepPoints V2: Verification Meets Regression for Object Detection
Introduction
神经网络预测的两种方法分别为验证(verification)与回归(regression),当前的一些目标定位方法结合了这两种方法来取得SOTA性能,先对预设的anchor box进行验证从而初步定位,然后回归box的偏移值进行调整。最近一些目标定位方法仅使用回归也取得了不错的性能,比如RepPoints。
为此,论文研究是否可以在纯回归的定位算法中加入验证任务来增强性能,具体的实现方法是在原网络上加入辅助分支(auxiliary side-branches)的形式,有监督地进行学习,优化中间特征以及最终的检测结果。
A Brief Review of a Pure Regression Method: RepPoints
RepPoints使用了纯回归的方法,具体的可以看看之前发的文章,从特征图位置\(p=(x,y)\)开始,直接回归一组点\(\mathcal{R}^{'}=\{p^{'}_i=(x^{'}_i, y^{'}_i)\}\)来表达目标的空间位置,共有两个连续的步骤:

\(\mathcal{R}=\{p_i=(x_i, y_i)\}^{n}_{i=1}\)为中间的点集,\(F_p\)为位置\(p\)的特征向量,\(g_i\)和\(g^{'}_i\)为2-d的回归函数,最终的bbox通过转化函数\(\mathcal{T}\)从点集\(\mathcal{R}\)和\(\mathcal{R}^{'}\)得到。尽管RepPoints使用了纯回归方法,没有anchor验证步骤,其性能并不比anchor-based方法差。
Corner Point Verification
角点验证由CornerNet提出,是论文采用的其中一种验证方法,在很多keypoint-based检测算法中有应用。角点验证给每个特征图位置预测一个分数,用来判断该特征点是否为目标的左上角点或右下角点,再预测两个偏移值来分别对角点进行调整,弥补下采样导致的精度问题。
论文的实现跟原版的类似,使用corner pooling进行特征提取,使用focal loss训练角点分数预测以及smooth L1 loss训练偏移值。若GT角点位于该特征点的bin中,则认为该特征点为正样本,其它均为负样本。在计算损失时,越靠近正样本点的负样本点会根据距离给一个高斯分数,可进行更平滑的学习。
当然,论文进行了一些改进,GT角点直接对应到FPN各层,不需要根据目标的大小决定对应哪层。
Within-box foreground verification
另一个验证任务是验证特征点是否在物体的内部,这种前景验证的信息均匀地存在于物体内部区域,不像角点那样集中于物体的极点。使用一个类别热图进行训练,对于\(C\)个物体类别,类别热图共有\(C\)维特征,每个维度表示该特征点属于该类别的概率。同样点,GT直接对应到FPN各层。
需要注意的是,经典的focal loss可能会使大物体相对于小物体得到更多的关注。为此,论文提出正则化focal loss,对于正样本点,根据其对应的物体包含的特征点数进行损失值的正则化,而对于负样本点,使用正样本点总数进行损失值的正则化。
A General Fusion Method
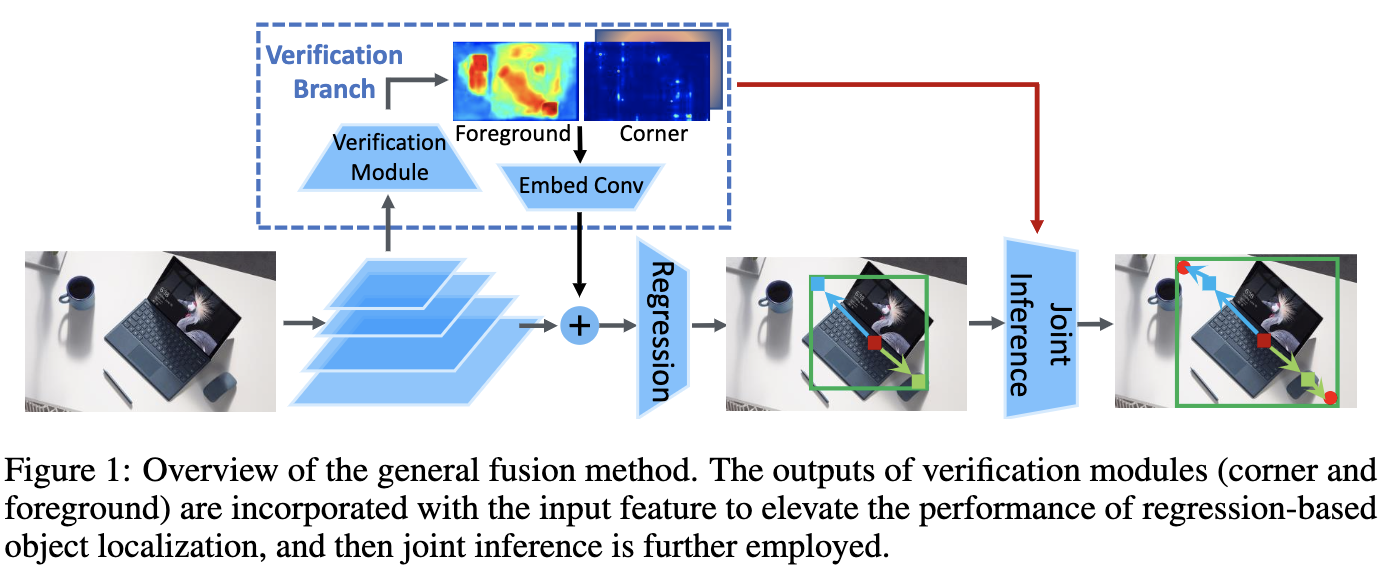
由于上述的两种验证任务都是相对物体的局部而言的,而纯回归的目标检测方法通常是直接检测目标的整体,所以论文采用辅助分支的形式接入,如图1所示,分别优化中间特征以及最终的检测结果。基于辅助分支,检测器可以得到以下收益:
- Better features by multi-task learning,辅助的验证任务能够在训练的时候提供更丰富的监督,从而得到能够提升检测准确率的更强大特征。相对于Mask R-CNN,论文的验证任务不需要额外标注。
- Feature enhancement for better regression,验证任务输出特征图包含角点位置以及前景区域,且特征图大小与回归使用的FPN特征图大小一致,所以将其进行\(1\times 1\)卷积(embed conv)处理后相加融合到FPN特征中。需要注意,主干回归任务的反向传播梯度仅传到embed conv层,避免影响验证任务的学习。
- Joint inference by both methodologies,特征的融合隐式地帮助目标定位,而论文也显式地利用角点验证任务的输出来进行联合推理。角点任务善于角点的定位,但不善于分辨是否为真的角点,而主干回归任务的功能则相反。为此,论文提出调整主干回归任务输出的预测框的角点\(p_t\):

\(t\)为角点类型(左上或右下),\(q^t\)为预测的角点位置,\(s(q^t)\)为验证分数,\(r\)为领域阈值,默认为1。
RepPoints v2: Fusing Verification into RepPoints
为了让RepPoints与辅助验证任务分支有更好的兼容性,显式地将点集的前两个点定义为左上角点和右下角点(explicit-corners),并根据这两个点将预测的点集转化为预测框。
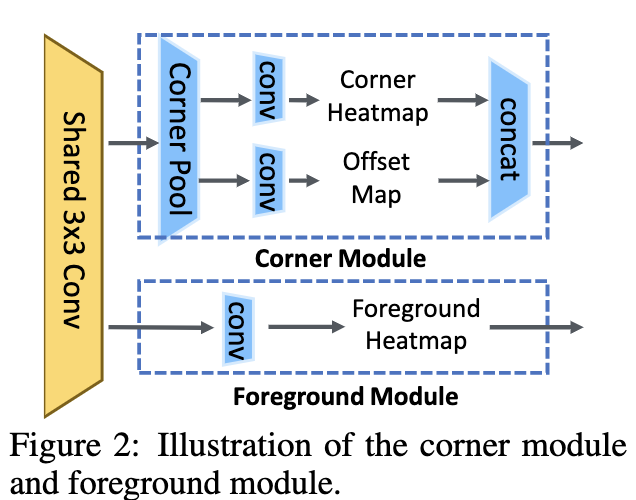
验证模块取定位子网(详情取看看RepPoints的文章)的第三个卷积层的输出作为验证任务的输入,验证模块的结构如图2所示,完整训练损失函数为:

Experiments
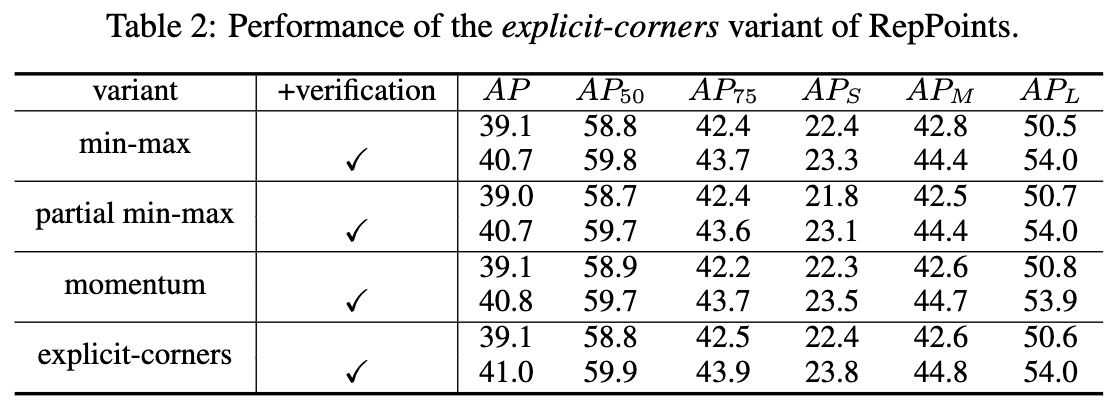
explicit-corners与原先方法的的效果对比。

两种验证任务的效果对比。

3种融合方法的效果对比。
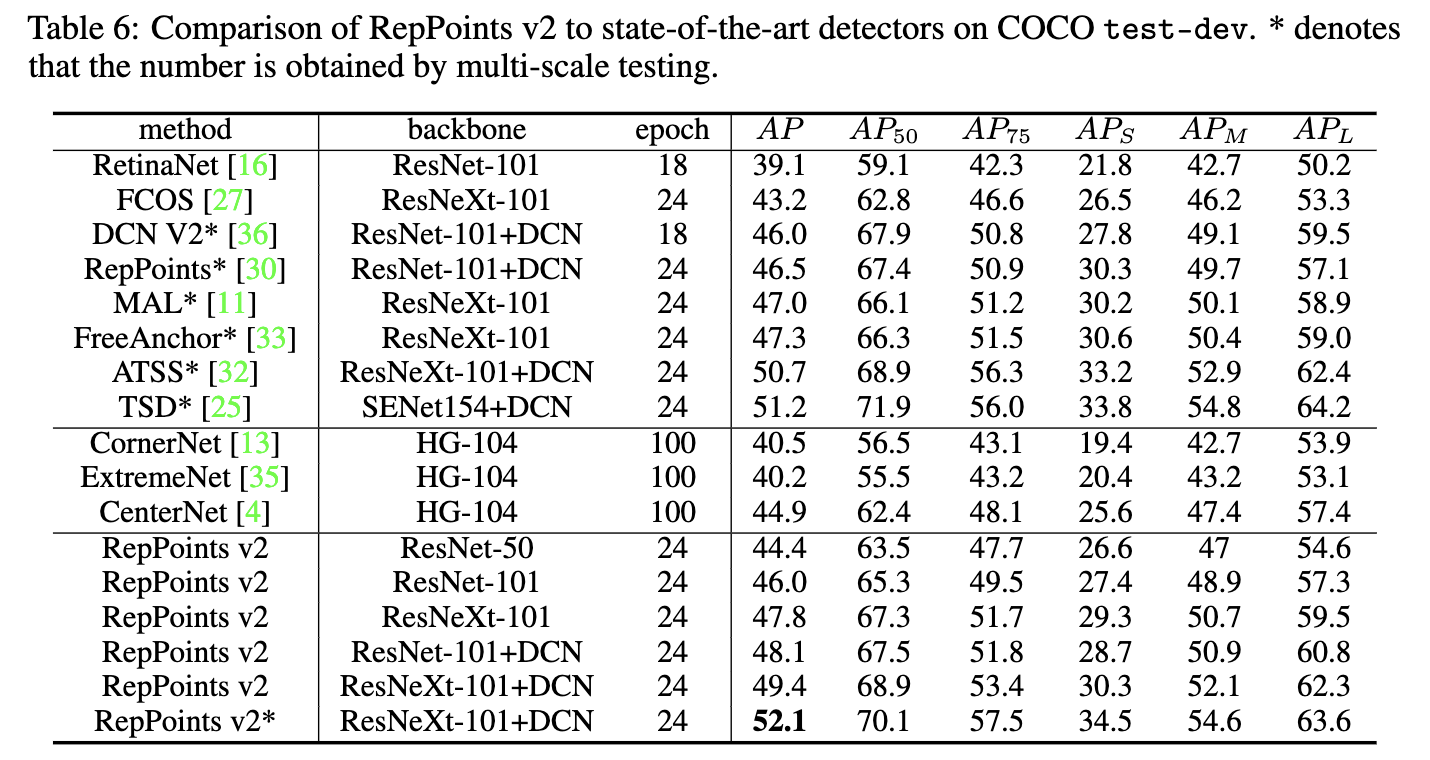
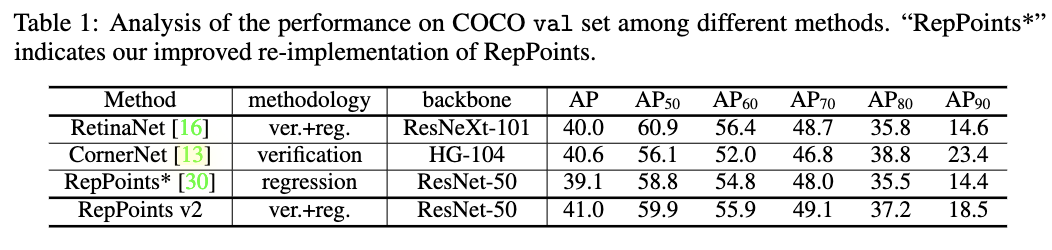
与SOTA性能对比。
Conclusion
RepPointsV2的整体思想类似与Mask R-CNN,加入更多的任务来监督目标检测算法的学习。虽然在创新性上可能不够新颖,但论文的通用性还是很不错的,而且将角点任务的输出用于联合推理,从对比实验上看提升不少。
如果本文对你有帮助,麻烦点个赞或在看呗~
更多内容请关注 微信公众号【晓飞的算法工程笔记】

RepPointsV2:更多的监督任务,更强的性能 | NIPS 2020的更多相关文章
- 价格更低、SLA 更强的全新 Azure SQL 数据库服务等级将于 9 月正式发布
继上周公告之后,很高兴向大家宣布更多好消息,作为我们更广泛的数据平台的一部分, 我们将在 Azure 上提供丰富的在线数据服务.9 月,我们将针对 Azure SQL 数据库推出新的服务等级.Azur ...
- SOLOv 2:实例分割(动态、更快、更强)
SOLOv 2:实例分割(动态.更快.更强) SOLOv2: Dynamic, Faster and Stronger 论文链接: https://arxiv.org/pdf/2003.10152. ...
- 【论文学习】YOLO9000: Better,Faster,Stronger(YOLO9000:更好,更快,更强)
原文下载:https://arxiv.org/pdf/1612.08242v1.pdf 工程代码:http://pjreddie.com/darknet/yolo/ 目录 目录 摘要 简介 BETTE ...
- 更强、更稳、更高效:解读 etcd 技术升级的三驾马车
点击下载<不一样的 双11 技术:阿里巴巴经济体云原生实践> 本文节选自<不一样的 双11 技术:阿里巴巴经济体云原生实践>一书,点击上方图片即可下载! 作者 | 陈星宇(宇慕 ...
- C# 数据操作系列 - 18 让Dapper更强的插件
0. 前言 在前一篇中我们讲到了Dapper的应用,但是给我们的感觉Dapper不像个ORM更像一个IDbConnection的扩展.是的,没错.在实际开发中我们经常用Dapper作为对EF Core ...
- 一个比 Redis 性能更强的数据库
给大家推荐一个比Redis性能更强的数据:KeyDB KeyDB是Redis的高性能分支,侧重于多线程.内存效率和高吞吐量.除了性能改进外,KeyDB还提供主动复制.闪存和子密钥过期等功能.KeyDB ...
- 利用pyinotify监控文件内容,像tailf命令但比它更强
Linux的tail/tailf命令使用了内核提供的inotify功能,下面的Python例子也使用inotify实现比tail/tailf更强的监控文件功能. watchfile.py #!/usr ...
- Delphi属性比对象的域有更强的功能
8.4 Delphi自定义组件(3) http://tech.163.com 2006-04-29 11:49:34 来源: 清华大学出版社 网友评论0 条 论坛 3. 测试未安装的组件 在将新组 ...
- 更强的 JsonPath 兼容性及性能测试
更强的 JsonPath 兼容性及性能测试 最近给自己的json框架snack3添加了json path支持.搞好之后,找了两个市面上流行框架比较性测试,以助自己改进框架的性能和兼容性. 测了一圈之后 ...
- Python装饰器:套层壳我变得更强了
Python装饰器:套层壳我变得更强了 Python装饰器:套层壳我变得更强了 关于作用域和闭包可以聊点什么? 什么是作用域 什么是闭包 装饰器:套层壳我变得更强了 参考资料 昨天阅读了<Pyt ...
随机推荐
- STC8A8K64S4A12内部时钟的IRTRIM和LIRTRIM简单标定
STC8A8K64S4A12因为没有固化的频率调节值, 要么在STC-ISP烧录时设置写入, 要么通过idata高地址读取, 这对于Linux下的SDCC用户就非常不方便, 既不能用STC-ISP, ...
- shell脚本实现进度条程序
1.实现效果 2.shell脚本 #!/bin/bash i=0 bar='' index=0 arr=( "|" "/" "-" &quo ...
- win32-CreateDIBSection的使用
使用CreateDIBSection 可以创建一个设备无关位图 #include <windows.h> using namespace std; int main() { HDC hdc ...
- At-abc342
AtCoder Beginner Contest 342 (已更新:C D) C 似曾相识的经典映射题--而只会map的蒟蒻成功又被卡住了 简单的用map映射无法处理如r->a,a->r这 ...
- linux基本命令--day02
目录树架构示意图 以下是对这些目录的解释: /bin: bin是Binary的缩写, 这个目录存放着最经常使用的命令. /boot: 这里存放的是启动Linux时使用的一些核心文件,包括一些连接文件以 ...
- docker 发布.net core 项目(linux)
一.准备阶段:前提:一台linux系统,安装好了Docker并启动 1.上传.netcore项目压缩文件 2.解压 注:若没有解压软件,先下载rar解压软件再安装:需注意系统是64位还是32 (下 ...
- Lua调试函数 debug.getinfo() namewhat详解
Lua调试的时候会用到debug.getinfo()函数,what的值文档给了解释: "Lua" : Lua function "C" : C function ...
- React之父组件向子组件传值
class Parent extends React.Component{ constructor(){ super(); this.state={co:"red"} } rend ...
- 【Azure App Service】通过Visual Studio部署Azure App Service 遇见 401 'Unauthorized'错误
问题描述 最近通过Visual Studio 2022部署Azure App Service的时候,突然遇见了部署失败, 401 Unauthorized错误. 错误消息: Build started ...
- [C++逆向] 8 数组和指针的寻址
目录 数组在函数中 字符串 数组作为参数 下标寻址和指针寻址 多维数组 存放指针类型数据的数组 指向数组的指针变量 函数指针 数组是相同类型数据的集合,以先行方式连续储存在内冲中 而指针只是一个保存地 ...