A* search算法
今天,还是国庆和中秋双节的时间节点,一个天气不错的日子,孩子已经早早的睡觉了,玩了一整天,也不睡觉,累的实在扛不住了,勉强洗澡结束,倒床即睡着的节奏。。。
不多说题外话,进入正题。
什么是A*搜索算法呢?就用百科的解说吧:
A*算法,A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。算法中的距离估算值与实际值越接近,最终搜索速度越快。
A*搜索的实际应用场景很多,但是大家最为熟悉的恐怕莫过于游戏了。典型的游戏就是穿越障碍寻宝,要求在最少的代价内找到宝贝,通常游戏中的代价,就是用最少的步骤实现宝贝的找寻。还有一种游戏场景是,给定入口地点,用最少的步骤走到指定的出口地点,中间有障碍物,每次只能在上下左右四个方向上走一步,且不能穿越障碍物。
就拿第二种游戏场景来解释A* search具体指的是什么内容吧。
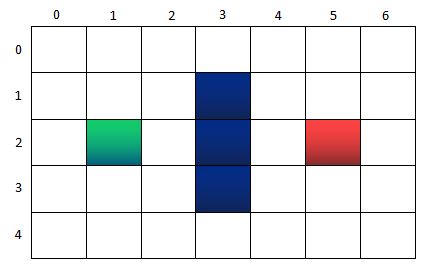
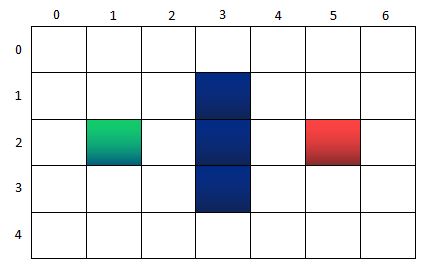
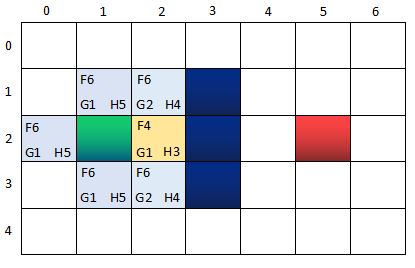
如上图所示,假设我们有一个7*5的迷宫方格,绿色的点表示起点,红色的点表示终点。中间三个蓝色的格子表示一堵墙,是障碍物。游戏的规则,是绿色的起点,每次只能向上下左右4个方向中移动一步,且不能穿越中间的墙,以最少的步骤到达红色的终点。
在解决这个问题之前,先要引入A*搜索算法的核心集合和公式:
核心集合:OpenList,CloseList
核心公式:F=G+H
其中,OpenList和CloseList用来存储格子点信息,OpenList表示可到达格子节点集合,CloseList表示已到达格子节点集合。
F=G+H表示对格子价值的评估,G表示从起点到当前点的代价;H表示从当前点到达终点的代价,指不考虑障碍物遮挡的情况下,这里,代价是指走的步数。至于F,就是对G和H的综合评估了,当然F越小,则从起点到达终点付出的代价就越小了。
就实际操作一下吧。还是上面的图,每个节点,用n(x,y)表示,x表示横坐标,y表示纵坐标,比如绿色的起点是n(1,2):
第一步:把起点放入OpenList里面。
OpenList: n(1,2)
CloseList
第二步:找出OpenList中F值最小的方格,即唯一的方格n(1,2)作为当前方格,并把当前格移出OpenList,放入CloseList。表示这个格子已到达且验证过了。
OpenList
CloseList:n(1,2)
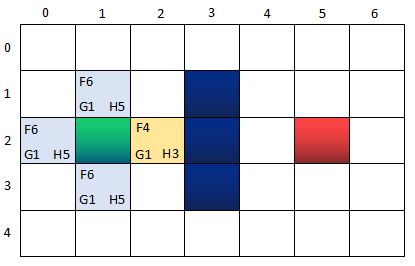
第三步:找出当前格上下左右所有可到达的格子,看它们是否在OpenList当中。如果不在,加入OpenList,计算出相应的G、H、F值,并把当前格子作为它们的“父节点”。
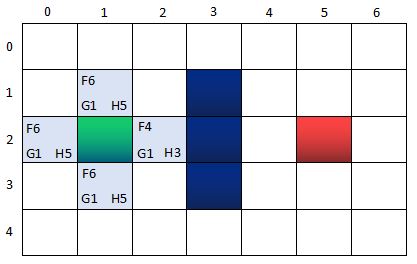
OpenList:n(0,2), n(1,1), n(2,2), n(1,3)
CloseList:n(1,2)
其中,n(0,2), n(1,1), n(2,2), n(1,3)的父节点是n(1,2).所谓的父节点,表示当前的这几个节点n(0,2), n(1,1), n(2,2), n(1,3)都是从这个所谓的父节点出发得到的分支节点,父节点用作后续找出最短路径用的。
上述3步,是一次局部寻路的过程,我们需要不断的重复第二步第三步,最终找到到达终点的最短路径。
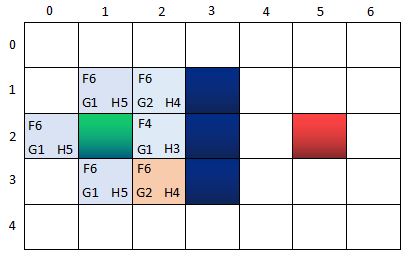
第二轮 ~ 第一步:找出OpenList中F值最小的方格,即方格n(2,2)作为当前方格,并把当前格移出OpenList,放入CloseList。代表这个格子已到达并检查过了。
此时的两个核心集合的节点信息:
OpenList:n(0,2), n(1,1), n(1,3)
CloseList:n(1,2), n(2,2)
其中,n(0,2), n(1,1), n(1,3)的父节点是n(1,2),n(2,2)的上一级节点(也可以称为父节点)是n(1,2).
第二轮 ~ 第二步:找出当前格上下左右所有可到达的格子,看它们是否在OpenList当中。如果不在,加入OpenList,计算出相应的G、H、F值,并把当前格子作为它们的“父节点”。
此时的两个核心集合的节点信息:
OpenList:n(0,2), n(1,1), n(1,3);n(2,1), n(2,3)
CloseList:n(1,2) <-----n(2,2)
其中,n(0,2), n(1,1), n(1,3)的父节点是n(1,2),而n(2,1), n(2,3)的父节点是n(2,2). CloseList中节点的指向关系,反映了寻路的路径过程。
为什么这一次OpenList只增加了两个新格子呢?因为n(3,2)是墙壁,自然不用考虑,而n(1,2)在CloseList当中,说明已经检查过了,也不用考虑。
第三轮 ~ 第一步:找出OpenList中F值最小的方格。由于这时候多个方格的F值相等,任意选择一个即可,比如n(2,3)作为当前方格,并把当前格移出OpenList,放入CloseList。代表这个格子已到达并检查过了。
此时的两个核心集合的节点信息:
OpenList:n(0,2), n(1,1), n(1,3);n(2,1)
CloseList:n(1,2) <-----n(2,2)<-----n(2,3)
其中,n(0,2), n(1,1), n(1,3)的父节点是n(1,2),而n(2,1)的父节点是n(2,2)。CloseList中节点的指向关系,反映了寻路的路径过程。
第三轮 ~ 第二步:找出当前格上下左右所有可到达的格子,看它们是否在OpenList当中。如果不在,加入OpenList,计算出相应的G、H、F值,并把当前格子作为它们的“父节点”。

此时的两个核心集合的节点信息:
OpenList:n(0,2), n(1,1), n(1,3);n(2,1) ;n(2,4)
CloseList:n(1,2) <-----n(2,2)<-----n(2,3)
其中,n(0,2), n(1,1), n(1,3)的父节点是n(1,2),而n(2,1)的父节点是n(2,2)。n(2,4)的父节点是n(2,3). CloseList中节点的指向关系,反映了寻路的路径过程。
剩下的就是以前面的方式继续迭代,直到OpenList中出现终点方格为止。
实际的推理,就到这里,下面,将结合上述的推理理论,用java程序,加以实现。今天,先将伪代码附上,改天将具体的java实现代码贴上来。
public Node AStarSearch(Node start, Node end) {
// 把起点加入openList
openList.add(start);
//主循环,每一轮检查一个当前方格节点
while (openList.size() > ) {
// 在OpenList中查找F值最小的节点作为当前方格节点
Node current = findMinNode();
// 当前方格节点从open list中移除
openList.remove(current);
// 当前方格节点进入closeList
closeList.add(current);
// 找到所有邻近节点
List<Node> neighbors = findNeighbors(current);
for (Node node : neighbors) {
if (!openList.contains(node)) {
//邻近节点不在openList中,标记父亲、G、H、F,并放入openList
markAndInvolve(current, end, node);
}
}
//如果终点在OpenList中,直接返回终点格子
if (find(openList, end) != null) {
return find(openList, end);
}
}
//OpenList用尽,仍然找不到终点,说明终点不可到达,返回空
return null;
}
2017-10-13 11:28
过了几天了,今天终于回来补全未完成的最终实现代码逻辑,直接上代码:
package com.shihuc.nlp.astarsearch; import java.io.File;
import java.io.FileNotFoundException;
import java.util.ArrayList;
import java.util.List;
import java.util.Scanner; class Node {
int x; //当前节点的x坐标
int y; //当前节点的y坐标
int px; //指向父节点的x坐标
int py; //指向父节点的y坐标
} public class Solution {
static List<Node> openList = new ArrayList<Node>();
static List<Node> closeList = new ArrayList<Node>(); /**
* @param args
* @throws FileNotFoundException
*/
public static void main(String[] args) throws FileNotFoundException { File file = new File("./src/com/shihuc/nlp/astarsearch/sample.txt");
Scanner sc = new Scanner(file);
int N = sc.nextInt();
for (int n = ; n < N; n++) {
int Y = sc.nextInt();
int X = sc.nextInt();
int sx = sc.nextInt();
int sy = sc.nextInt();
int ex = sc.nextInt();
int ey = sc.nextInt();
Node start = new Node();
start.x = sx; start.y = sy;
Node end = new Node();
end.x = ex; end.y = ey;
int grid[][] = new int[X][Y];
openList.clear();
closeList.clear();
for (int x = ; x < X; x++) {
for (int y = ; y < Y; y++) {
grid[x][y] = sc.nextInt();
}
}
Node ne = AStarSearch(start,end, grid);
if(ne == null){
System.out.println("No." + n + " Can not reach the end node");
}else{
add2Cl(ne);
//printRawPath(n);
printRealPath(n, start);
}
}
if(sc != null){
sc.close();
}
} /**
* 打印当前节点以及其父节点的debug函数,查看父子节点关系
*
* @author shihuc
* @param idx
*/
public static void printRawPath(int idx){
System.out.println("No." + idx);
for(Node p: closeList){
System.out.println("([" + p.x + "," + p.y + "][" + p.px + "," + p.py + "])" );
}
System.out.println();
} /**
* 打印最终的路径信息的输出函数,起点节点用于输出结束判决
*
* @author shihuc
* @param start
*/
public static void printRealPath(int idx, Node start){
List<Node> path = new ArrayList<Node>();
Node cn = closeList.get(closeList.size() - );
Node temp = new Node();
temp.x = cn.x;temp.y = cn.y;temp.px = cn.px;temp.py = cn.py;
path.add(cn);
do{
for(int i=; i<closeList.size(); i++){
Node pn = closeList.get(i);
if(temp.px == pn.x && temp.py == pn.y){
temp.px = pn.px;
temp.py = pn.py;
temp.x = pn.x;
temp.y = pn.y;
path.add(pn);
closeList.remove(pn);
break;
}
}
}while(!(temp.x == start.x && temp.y == start.y));
System.out.print("No." + idx + " ");
for(int i=path.size()- ; i >=; i--){
Node n = path.get(i);
System.out.print("[" + n.x + "," + n.y + "]->");
}
System.out.println();
} /**
* A*搜索的完整算法实现。
*
* @author shihuc
* @param start 起点的坐标
* @param end 目标点的坐标
* @param grid 待搜索的网络
* @return
*/
public static Node AStarSearch(Node start, Node end, int grid[][]) {
// 把起点加入 openList
add2Ol(start);
// 主循环,每一轮检查一个当前方格节点
while (openList.size() > ) {
// 在OpenList中查找 F值最小的节点作为当前方格节点
Node current = findMinNode(start,end);
// 当前方格节点从openList中移除
remove4Ol(current);
// 当前方格节点进入 close list
add2Cl(current);
// 找到所有邻近节点
List<Node> neighbors = findNeighbors(current, grid);
for (Node node : neighbors) {
if (openListMarkedNode(node) == null) {
//邻近节点不在OpenList中,标记父节点,并放入OpenList
markAndInvolve(current, node);
}
}
// 如果终点在OpenList中,直接返回终点格子
Node last = findInOpenList(end);
if ( last != null) {
return last;
}
}
// OpenList用尽,仍然找不到终点,说明终点不可到达,返回空
return null;
} /**
* 向openList添加节点。若节点已经存在,则不添加。
*
* @author shihuc
* @param n 待添加的节点
*/
private static void add2Ol(Node n){
if(openListMarkedNode(n) == null){
openList.add(n);
}
} /**
* 向closeList添加节点信息。若节点已经存在,则不添加。
*
* @author shihuc
* @param n
*/
private static void add2Cl(Node n){
for(Node pn: closeList){
if(pn.x == n.x && pn.y == n.y){
return;
}
}
closeList.add(n);
} /**
* 从openList中删除指定的节点。通过坐标信息定位指定节点。
*
* @author shihuc
* @param n
*/
private static void remove4Ol(Node n){
for(Node ne:openList){
if(ne.x == n.x && ne.y == n.y){
openList.remove(ne);
return;
}
}
} /**
* openlist中若有已经标记的指定节点,则返回该节点,否则返回null节点。
*
* @author shihuc
* @param n
* @return
*/
private static Node openListMarkedNode(Node n){
for(Node ne: openList){
if(ne.x == n.x && ne.y == n.y){
return ne;
}
}
return null;
} /**
* 从closeList检查是否存在指定的节点。
*
* @author shihuc
* @param n
* @return
*/
private static boolean isInCloseList(Node n){
for(Node pn: closeList){
if(pn.x == n.x && pn.y == n.y){
return true;
}
}
return false;
} /**
* 利用类似勾股定理的方式计算H值以及G值。
*
* @author shihuc
* @param x
* @param y
* @return
*/
private static int gouguLaw(int x, int y){
return x*x + y*y;
} /**
* 在openList中查找F=G+H的值最小的节点。
*
* @author shihuc
* @param start
* @param end
* @return
*/
public static Node findMinNode(Node start, Node end){
int fMin = ;
int sx = start.x, sy = start.y;
int ex = end.x, ey = end.y;
Node nm = new Node();
Node n0 = openList.get();
nm.x = n0.x;nm.y = n0.y;
fMin = gouguLaw(n0.x - sx, n0.y - sy) + gouguLaw(n0.x - ex, n0.y - ey);
for(int i=; i<openList.size(); i++){
Node n = openList.get(i);
int g = gouguLaw(n.x - sx, n.y - sy);
int h = gouguLaw(n.x - ex, n.y - ey);
if(fMin > g+h){
nm.x = n.x;
nm.y = n.y;
nm.px = n.px;
nm.py = n.py;
fMin = g+h;
}
}
return nm;
} /**
* 以当前节点为中心,查找没有验证过(不在closeList中)的上下左右邻居节点。
*
* @author shihuc
* @param current
* @param grid
* @return
*/
public static List<Node> findNeighbors(Node current, int grid[][]){
int x = current.x;
int y = current.y; int Y = grid.length;
int X = grid[].length; List<Node> neigs = new ArrayList<Node>();
if(x - >= && grid[y][x - ] != ){
Node nu = new Node();
nu.x = x - ;
nu.y = y;
if(!isInCloseList(nu)){
neigs.add(nu);
}
}
if(x + < X && grid[y][x+] != ){
Node nu = new Node();
nu.x = x + ;
nu.y = y;
if(!isInCloseList(nu)){
neigs.add(nu);
}
}
if(y - >= && grid[y - ][x] != ){
Node nu = new Node();
nu.x = x;
nu.y = y - ;
if(!isInCloseList(nu)){
neigs.add(nu);
}
}
if(y + < Y && grid[y + ][x] != ){
Node nu = new Node();
nu.x = x;
nu.y = y + ;
if(!isInCloseList(nu)){
neigs.add(nu);
}
}
return neigs;
} /**
* 检查指定节点是否在openList中。
*
* @author shihuc
* @param ed
* @return
*/
public static Node findInOpenList(Node ed){
return openListMarkedNode(ed);
} /**
* 这个函数非常重要,标记当前节点的邻居节点的父亲节点为当前节点,这个标记关系,用于后续输出A*搜索的最终路径
*
* @author shihuc
* @param current
* @param n
*/
public static void markAndInvolve(Node current, Node n){
n.px = current.x;
n.py = current.y;
openList.add(n);
}
}
测试用到的数据样本(sample.txt内容):
最终的数据测试结果:
No. [,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->
No. Can not reach the end node
No. [,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->[,]->
上述算法,场景比较简单,当前节点的上下左右四个方向,有的要求8个方向的,甚至障碍物有其他的要求的。都离不开这里的最要思想,F=G+H.
欢迎探讨,欢迎评论以及转帖,请注明出处!
A* search算法的更多相关文章
- 从vector容器中查找一个子串:search()算法
如果要从vector容器中查找是否存在一个子串序列,就像从一个字符串中查找子串那样,次数find()与find_if()算法就不起作用了,需要采用search()算法:例子: #include &qu ...
- Breadth-first search 算法(Swift版)
在讲解Breadth-first search 算法之前,我们先简单介绍两种数据类型Graph和Queue. Graph 这就是一个图,它由两部分组成: 节点, 使用圆圈表示的部分 边, 使用线表示的 ...
- 对《禁忌搜索(Tabu Search)算法及python实现》的修改
这个算法是在听北大人工智能mooc的时候,老师讲的一种局部搜索算法,可是举得例子不太明白.搜索网页后,发现<禁忌搜索(Tabu Search)算法及python实现>(https://bl ...
- A* search算法解迷宫
这是一个使用A* search算法解迷宫的问题,细节请看:http://www.laurentluce.com/posts/solving-mazes-using-python-simple-recu ...
- 【优化算法】Greedy Randomized Adaptive Search算法 超详细解析,附代码实现TSP问题求解
01 概述 Greedy Randomized Adaptive Search,贪婪随机自适应搜索(GRAS),是组合优化问题中的多起点元启发式算法,在算法的每次迭代中,主要由两个阶段组成:构造(co ...
- 关于 Image Caption 中测试时用到的 beam search算法
关于beam search 之前组会中没讲清楚的 beam search,这里给一个案例来说明这种搜索算法. 在 Image Caption的测试阶段,为了得到输出的语句,一般会选用两种搜索方式,一种 ...
- R-CNN目标检测的selective search(SS算法)
候选框确定算法 对于候选框的位置确定问题,简单粗暴的方法就是穷举或者说滑动窗口法,但是这必然是不科学的,因为时间和计算成本太高,直观的优化就是假设同一种物体其在图像邻域内有比较近似的特征(例如颜色.纹 ...
- 算法-search
O(big o) 是上限,是我们关注的算法的时间复杂度.数据量大,数据量涨一千倍,lgn的算法就是 耗费的时间就是10倍,o(n)就是一千倍,o(n2)就是一百万倍的差距 例一:Sequential ...
- 常用查找数据结构及算法(Python实现)
目录 一.基本概念 二.无序表查找 三.有序表查找 3.1 二分查找(Binary Search) 3.2 插值查找 3.3 斐波那契查找 四.线性索引查找 4.1 稠密索引 4.2 分块索引 4.3 ...
随机推荐
- L2-008. 最长对称子串
L2-008. 最长对称子串 时间限制 100 ms 内存限制 65536 kB 代码长度限制 8000 B 判题程序 Standard 作者 陈越 对给定的字符串,本题要求你输出最长对称子串的长度. ...
- 【Python】多线程-1
#练习:创建一个线程 from threading import Thread import time def run(a = None, b = None) : print a, b time.sl ...
- 2019 flag
学习 1.学会一种新的编程语言或脚本语言,并编写不少于十个应用 2.读5-8本其他学科书籍,(经济,心里学等) 3.坚持每个月最少更新8-10篇博客(技术,学习) 4.阅读并理解和应用两个开源lib ...
- [LeetCode&Python] Problem 530. Minimum Absolute Difference in BST
Given a binary search tree with non-negative values, find the minimum absolute difference between va ...
- 修改JAVA代码,需要重启Tomcat的原因
准确的说只有修改方法中的内容才不需要重启,因为tomcat中对于方法的调用是动态的,调用方法的时候,方法的内容才会被加载 新增成员变量,方法,或修改静态方法和静态变量.创建新的类 这些都是需要重启的, ...
- Github&&SourceTree
如何将本地的代码或者是文件上传到github 方法一:(github上面创建仓库,远程仓库克隆到本地,将文件拖拽到本地仓库) cd 文件夹 git clone 链接(github上面创建新仓库的链 ...
- hdu1907 John 博弈
Little John is playing very funny game with his younger brother. There is one big box filled with M& ...
- 下载B站、秒拍等视频网站视频
需要一个FVD Downloader(插件) 安装过程很简单,会浏览器安装插件的就不多说了!
- Go Example--函数多返回值
package main import "fmt" func main() { a,b := vals() fmt.Println(a) fmt.Println(b) } //函数 ...
- itcast-ssh-crm实践
分析 BaseDao 文件上传