Arduino 串行外设接口——W3Cschool
来源:https://www.w3cschool.cn/arduino/arduino_serial_peripheral_interface.html
Arduino 串行外设接口
串行外设接口(SPI)总线是用于串行通信的系统,最多可使用四个导体,通常为三个。一个导体用于数据接收,一个导体用于数据发送,一个导体用于同步,另一个导体用于选择与之通信的设备。它是一个全双工连接,这意味着数据是同时发送和接收的。最大波特率高于I2C通信系统中的波特率。
板的SPI引脚
SPI使用以下四条线:
SCK - 这是由主机驱动的串行时钟。
MOSI - 这是由主机驱动的主输出/从输入。
MISO - 这是由主机驱动的主输入/从输出。
SS - 这是从机选择线。
使用以下函数,必须包括SPI.h.
SPI.begin() - 通过将SCK,MOSI和SS设置为输出来初始化SPI总线,将SCK和MOSI拉低,将SS拉高。
SPI.setClockDivider(分频器) - 相对于系统时钟设置SPI时钟分频器。在基于AVR的板上,可用的分频器为2,4,8,16,32,64或128。默认设置为SPI_CLOCK_DIV4,它将SPI时钟设置为系统时钟的四分之一(对于20 MHz的电路板为5 Mhz)。
Divider - 它可以是(SPI_CLOCK_DIV2,SPI_CLOCK_DIV4,SPI_CLOCK_DIV8,SPI_CLOCK_DIV16,SPI_CLOCK_DIV32,SPI_CLOCK_DIV64,SPI_CLOCK_DIV128)。
SPI.transfer(val) - SPI传输基于同时发送和接收:接收的数据在receivedVal中返回。
SPI.beginTransaction(SPISettings(speedMaximum,dataOrder,dataMode)) - speedMaximum是时钟,dataOrder(MSBFIRST或LSBFIRST),dataMode(SPI_MODE0,SPI_MODE1,SPI_MODE2或SPI_MODE3)。
SPI中有四种操作模式,如下所示:
模式0(默认值) - 时钟通常为低电平(CPOL = 0),数据在从低电平到高电平(前沿)(CPHA = 0)的转换时采样。
模式1 - 时钟通常为低电平(CPOL = 0),数据在从高电平到低电平(后沿)(CPHA = 1)的转换时采样。
模式2 - 时钟通常为高电平(CPOL = 1),数据在从高电平到低电平(前沿)(CPHA = 0)的转换时采样。
模式3 - 时钟通常为高电平(CPOL = 1),数据在从低电平到高电平(后沿)(CPHA = 1)的转换时采样。
SPI.attachInterrupt(handler) - 当从设备从主设备接收数据时调用的函数。
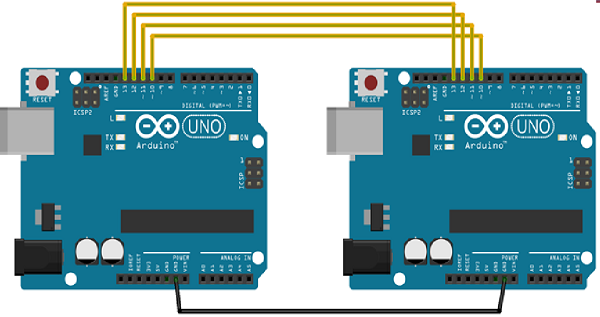
现在,我们将两个Arduino UNO板连接在一起;一个作为主机,另一个作为从机。
- (SS):引脚10
- (MOSI):引脚11
- (MISO):引脚12
- (SCK):引脚13
接地是常见的。以下是两个电路板之间的连接的图示:
让我们看看SPI作为主机和SPI作为从机的例子。
SPI为主机
例子
#include <SPI.h>
void setup (void) {
Serial.begin(115200); //set baud rate to 115200 for usart
digitalWrite(SS, HIGH); // disable Slave Select
SPI.begin ();
SPI.setClockDivider(SPI_CLOCK_DIV8);//divide the clock by 8
}
void loop (void) {
char c;
digitalWrite(SS, LOW); // enable Slave Select
// send test string
for (const char * p = "Hello, world!\r" ; c = *p; p++) {
SPI.transfer (c);
Serial.print(c);
}
digitalWrite(SS, HIGH); // disable Slave Select
delay(2000);
}
SPI为从机
例子
#include <SPI.h>
char buff [50];
volatile byte indx;
volatile boolean process; void setup (void) {
Serial.begin (115200);
pinMode(MISO, OUTPUT); // have to send on master in so it set as output
SPCR |= _BV(SPE); // turn on SPI in slave mode
indx = 0; // buffer empty
process = false;
SPI.attachInterrupt(); // turn on interrupt
}
ISR (SPI_STC_vect) // SPI interrupt routine {
byte c = SPDR; // read byte from SPI Data Register
if (indx < sizeof buff) {
buff [indx++] = c; // save data in the next index in the array buff
if (c == '\r') //check for the end of the word
process = true;
}
} void loop (void) {
if (process) {
process = false; //reset the process
Serial.println (buff); //print the array on serial monitor
indx= 0; //reset button to zero
}
}

您可能还喜欢:
Arduino 串行外设接口——W3Cschool的更多相关文章
- Arduino 串行外设接口(SPI)
时间有限有其他项目工作在忙,感觉作者写的不错,就先记录下来了. 这几天用SPI--Arduino 在供应商的电子原件上游离游走,重要的是可以读写了, 下面是在查资料看到的一篇不错的文章关于用Ardui ...
- Serializable 可串行化接口
Serializable 可串行化接口 定义一个User类,实现Serializable接口: package com.monkey1025; import java.io.Serializable; ...
- stm32串行设备接口SPI控制max31865
本人是刚入行的嵌入式,之前也没有多少项目经验,故在公司的这几个月里,可谓是如履薄冰,对于公司不同项目使用的不同的设备之多,数据手册之繁杂,让我不禁望洋兴叹,故而不愿意放弃周末这大好的自我提升时间,努力 ...
- 嵌入式驱动开发之dsp fpga通信接口---spi串行外围接口、emif sram接口
-----------------------------------------author:pkf ------------------------------------------------ ...
- 痞子衡嵌入式:串行EEPROM接口事实标准及SPI EEPROM简介
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是EEPROM接口标准及SPI EEPROM. 痞子衡之前写过一篇文章 <SLC Parallel NOR简介>,介绍过并行N ...
- SPI、I2C、UART三种串行总线协议的区别和SPI接口介绍(转)
SPI.I2C.UART三种串行总线协议的区别 第一个区别当然是名字: SPI(Serial Peripheral Interface:串行外设接口); I2C(INTER IC BUS) UART( ...
- 【转载】IIC SPI UART串行总线
一.SPISPI(Serial Peripheral Interface,串行外设接口)是Motorola公司提出的一种同步串行数据传输标准,在很多器件中被广泛应用. 接口SPI接口经常被称为4线串行 ...
- SPI、I2C、UART三种串行总线协议的区别
第一个区别当然是名字: SPI(Serial Peripheral Interface:串行外设接口); I2C(INTER IC BUS) UART(Universal Asynchronous R ...
- 【高速接口-RapidIO】2、RapidIO串行物理层的包与控制符号
一.RapidIO串行物理层背景介绍 上篇博文提到RapidIO的物理层支持串行物理层与并行物理层两种,由于Xilinx 部分FPGA内部已经集成了串行高速收发器,所以用FPGA实现RapidIO大多 ...
随机推荐
- 利用 Python 写个七夕表白神器
今天是七夕节,相比于现代人自创的 502,不对是 520,七夕才是中国传统意义上的情人节,本文分享几个 Python 表白程序,情侣可以现学现用,单身的话也可以先收藏一下,说不定下次就用上了. 很多人 ...
- 前端修仙之路---一、如何用gulp搭建一套web前端开发框架
引言 相信从事web前端开发的朋友都知道,现在流行的Vue.AngularJS等框架中,它们都有独立的脚手架来创建项目,比如Vue有vue-cli,Angular有angula-cli.脚手架可以一键 ...
- wpf附加属性详解
为什么使用附加属性 附加属性的一个用途是允许不同的子元素为父元素中定义的属性指定唯一的值. 此方案的一个具体应用是,让子元素通知父元素它们在用户界面 (UI) 中的呈现方式. 一个示例是 DockPa ...
- Apache Pulsar 社区周报:08-08 ~ 08-14
关于 Apache Pulsar Apache Pulsar 是 Apache 软件基金会顶级项目,是下一代云原生分布式消息流平台,集消息.存储.轻量化函数式计算为一体,采用计算与存储分离架构设计,支 ...
- LinuxIP配置方法
一.双网卡双IP. eth0为电信,eth1为联通. # cd /etc/sysconfig/network-scripts/ # vi ifcfg-eth0 DEVICE=eth0 HWADDR=0 ...
- UVA 11292-Dragon of Loowater (贪心)
Once upon a time, in the Kingdom of Loowater, a minor nuisance turned into a major problem. The shor ...
- 在Nginx里指定ip_hash的方式解决Tomcat集群session的问题
据称,Tomcat集群session同步方案有以下几种方式: 1)使用tomcat自带的cluster方式,多个tomcat间自动实时复制session信息,配置起来很简单.但这个方案的效率比较低,在 ...
- Vue 侦听器 watch
1. 侦听器 watch Vue 提供了一种更通用的方式来观察和响应 Vue 实例上的数据变动:侦听属性 当属性发生改变时,自动触发属性对应的侦听器. 当需要在数据变化时执行异步或开销较大的操作时,这 ...
- python语法,基础
1.用缩进表达代码逻辑:推荐缩进4个空格 2.注释和续行与shell一样 在pycharm中,按ctrl + / 可以快速添加/取消注释 3.多个语句书写在同一行,可以使用分号进行分割.但不推荐 输出 ...
- 看图学习 ArrayBuffers 和 SharedArrayBuffers
原文地址:A cartoon intro to ArrayBuffers and SharedArrayBuffers 原文作者:Lin Clark 译者:黑黑 校对者:Bob 在上一篇文章中,老司机 ...