OpenGL投影矩阵(Projection Matrix)构造方法
(翻译,图片也来自原文)
一、概述
绝大部分计算机的显示器是二维的(a 2D surface)。在OpenGL中一个3D场景需要被投影到屏幕上成为一个2D图像(image)。这称为投影变换(参见这或这),需要用到投影矩阵(projection matrix)。
首先,投影矩阵会把所有顶点坐标从eye coordinates(观察空间,eye space或view space)变换到裁剪坐标(clip coordinated,属于裁剪空间,clip space)。然后,这些裁剪坐标被变换到标准化设备坐标(normalized device coordinates, NDC,即坐标范围在-1到1之间),这一步是通过用用裁剪坐标的\(w_c\)分量除裁剪坐标实现的。
因此,我们要记住投影矩阵干了两件事: 裁剪clipping(即frustum culling,视景体剔除)和生成NDC。下文会讲述如何根据6个参数(left, right, bottom, top, near和far边界值)来构建投影矩阵。
注意视景体剔出(也即clipping)是在裁剪坐标下完成的,是早于用\(w_c\)(即上面提到的\(w\)分量,c表示clipping)除裁剪坐标的(它会生成NDC)。裁剪坐标\(x_c, y_c, z_c\)会与\(w_c\)进行比较。如果裁剪坐标比\(-w_c\)小或者比\(w_c\)大,则丢弃这个顶点(vertex)。即经裁剪后剩余的顶点的裁剪坐标满足:\(-w_c < x_c, y_c, z_c < w_c\)。OpenGL会成发生裁剪的地方生成新的边,如下图1,一个三角形经裁后,成了一个梯形,两条红色的边就是裁剪后新生成的。
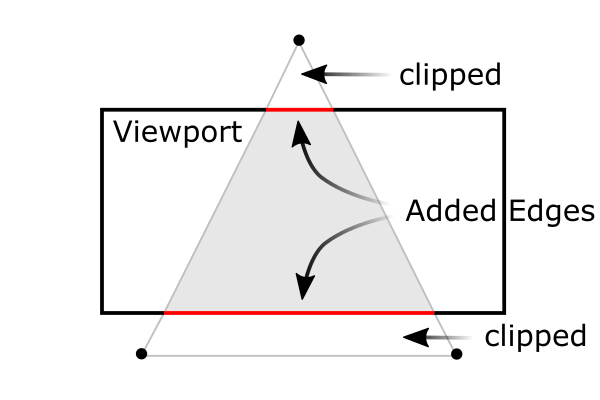
(图1. 一个被视体裁剪的三角形)
一般常用的有透视投影和正交投影,相应地也就有两种投影矩阵。
二、透视投影(Perspective Projection)
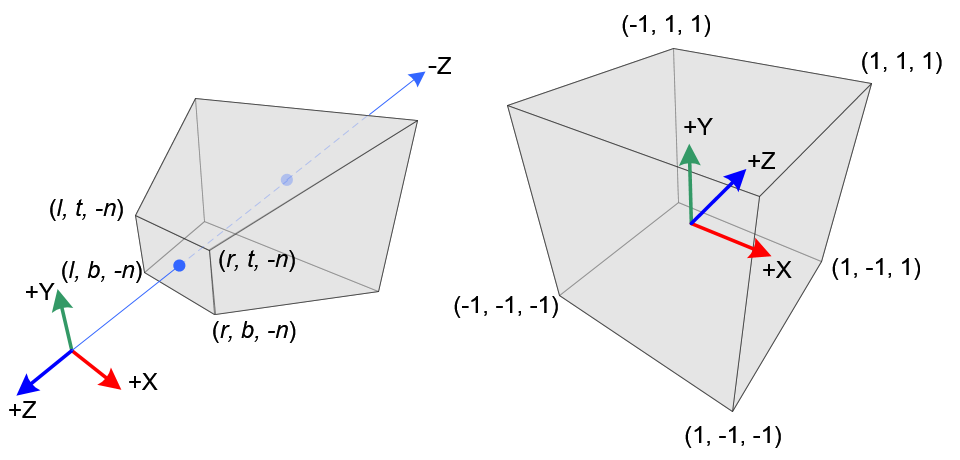
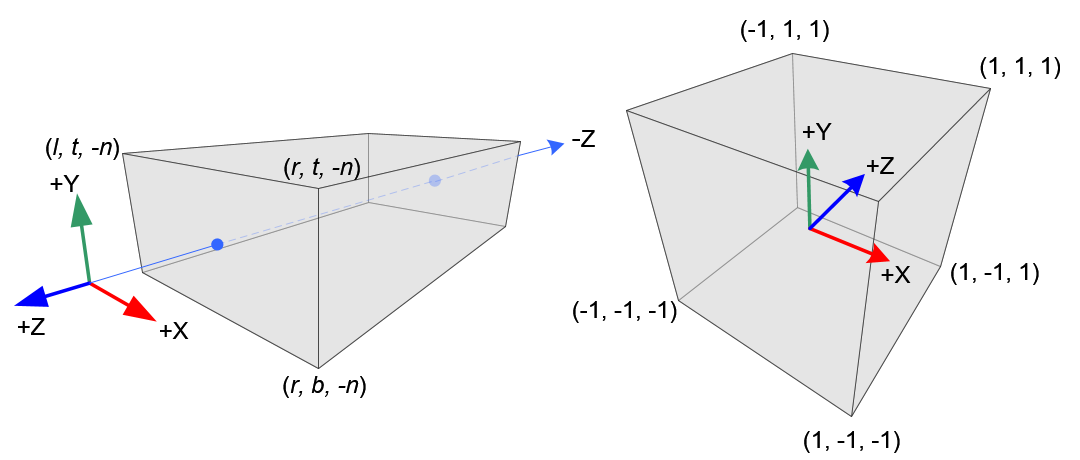
(图2. 透视投影中的视景体和标准化设备坐标NDC)
在透视投影中,一个3D point是在一个截头锥体中(truncated pyramid frustum,上面图2左图,即一个棱台),会被映射到一个立方体(NDC坐标空间)中,x坐标范围从[1, r]变成了[-1, 1],y坐标范围从[b, t]变成了[-1, 1],z坐标从[-n, -f]变成了[-1, 1]。
注意在view space中(即eye coordinate),OpenGL使用的是右手坐标系(上面图2左图),但是在NDC中使用的是左手坐标系(上面图2右图)。这样的话,在view space中camera位于坐标原点看向-z轴,而在NDC中camera是看向+z轴的。上面图2中的n表示近裁剪面(near plane),是正值。因为glFrustum()接受的near、far的值是正的,所以在在构造投影矩阵时,要为它们取负(negate them)。
在OpenGL中,view space(又称为eye space)中的一个3D point被投影到近裁剪面(此处用近裁剪面作投影平面,projection plane)上。下图3和图4显示了eye space中的一个点\((x_e, y_e, z_e)\)是怎样被投影成近裁剪面上的一个点\((x_p, y_p, z_p)\)。
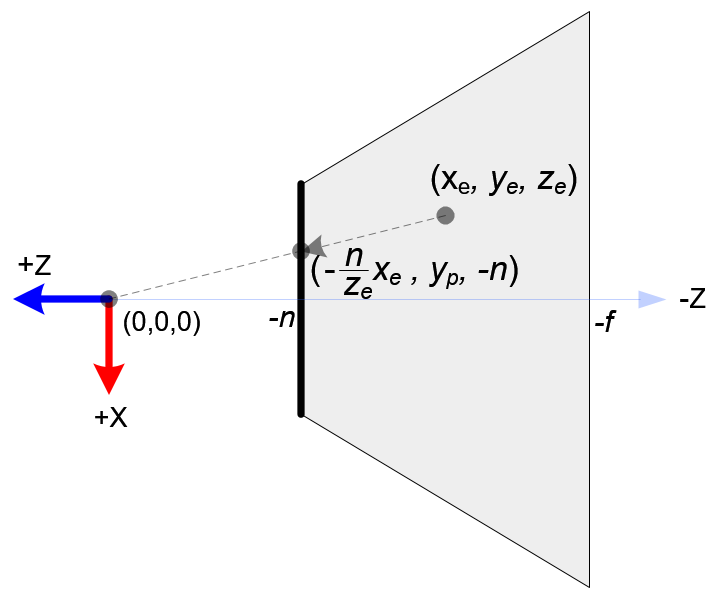
(图3. 视景体的俯视图)
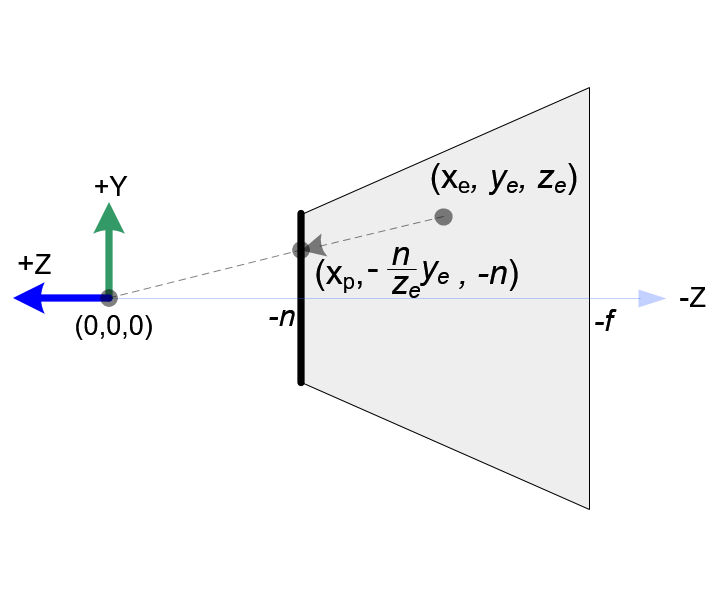
(图4.视景体的侧视图)
从视景体的俯视图(图3)看,x轴坐标\(x_e\)被映射成为\(x_p\),而\(x_p\)可以根据三角形相似形计算出来:
\]
从视景体的侧视图(图4)看,可以用相似的方法计算出\(y_p\):
\]
注意\(x_p\)和\(y_p\)都依赖\(z_e\)并与\(-z_e\)成反比。这是构建投影矩阵的第一个线索。在eye coordinates被投影矩阵乘后,得到的裁剪坐标仍然是齐次坐标(homogeneous coordinates)。最终它需要除以裁剪坐标的w分量,才能变成标准化设备坐标(NDC)。
\begin{matrix}
x_{clip}\\
y_{clip}\\
z_{clip}\\
w_{clip}
\end{matrix}
\right) = M_{projection}\cdot \left(
\begin{matrix}
x_{eye}\\
y_{eye}\\
z_{eye}\\
w_{eye}
\end{matrix}
\right),
\left(
\begin{matrix}
x_{ndc}\\
y_{ndc}\\
z_{ndc}
\end{matrix}
\right)=\left(
\begin{matrix}
\frac{x_{clip}}{w_{clip}}\\
\frac{y_{clip}}{w_{clip}}\\
\frac{z_{clip}}{w_{clip}}
\end{matrix}
\right)
\]
因此,我们可以把裁剪坐标的w分量设置为\(-z_e\),则投影矩阵第4行变为(0, 0, -1, 0)。
\begin{matrix}
x_c\\
y_c\\
z_c\\
w_c
\end{matrix}
\right)=\left(
\begin{matrix}
\cdot & \cdot &\cdot &\cdot\\
\cdot & \cdot &\cdot &\cdot\\
\cdot & \cdot &\cdot &\cdot\\
0 & 0 & -1 & 0
\end{matrix}
\right) \left(
\begin{matrix}
x_e\\
y_e\\
z_e\\
w_e
\end{matrix}
\right),
\therefore w_c=-z_e
\]
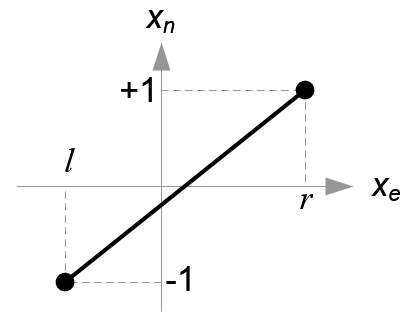
接下来,我们把刚计算得到的\(x_p, y_p\)线性地(with linear relationship)映射到NDC中的\(x_n, y_n\)(这里的n表示NDC):\([l, r] \Rightarrow [-1, 1]\),\([b, t] \Rightarrow [-1, 1]\)。
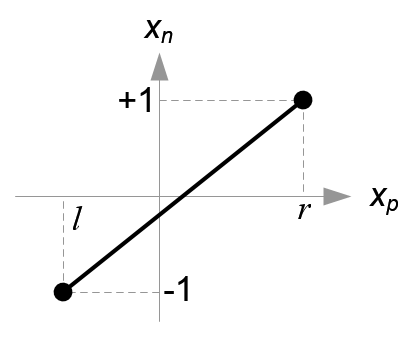
(图5. 把\(x_p\)映射到\(x_n\))
因为\(x_p\)和\(x_n\)之间是线性映射关系,如图5,所以可设两者之间的映射函数为:
\]
把\((x_p, x_n) = (r, l)\)代入上面方程得:
\]
所以
\begin{aligned}
\beta&=1 - \frac{2r}{r-l}=\frac{r-l}{r-l} - \frac{2r}{r-l}\\
&=\frac{r-l-2r}{r-l}=\frac{-r-l}{r-l}=-\frac{r+l}{r-l}
\end{aligned}
\end{equation}
\\
\therefore x_n=\frac{2x_p}{r-l}-\frac{r+l}{r-l}
\]
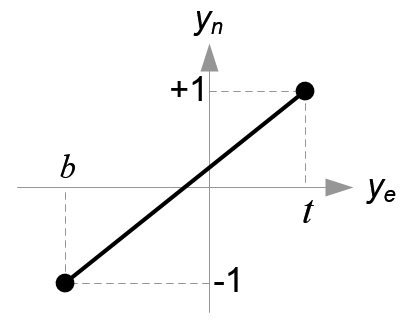
同理,可以求出\(y_p\)和\(y_n\)之间的关系表达式,如图6及以下公式:
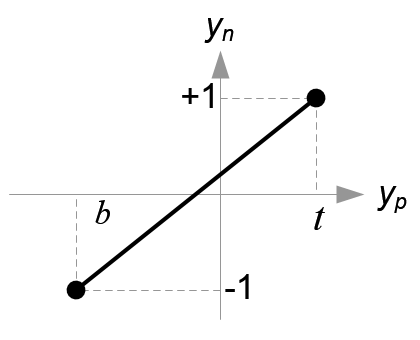
(图6.把\(y_p\)映射到\(y_n\))
\]
用$ (y_p, y_n)=(t,1)$代入上式得
\begin{equation}
\begin{aligned}
\beta &= 1 - \frac{2t}{t-b} = \frac{t-b}{t-b} - \frac{2t}{t-b}\\
&=\frac{t-b-2t}{t-b}=\frac{-t-b}{t-b}=-\frac{t+b}{t-b}
\end{aligned}
\end{equation}
\\
\therefore y_n=\frac{2y_p}{t-b}-\frac{t+b}{t-b}
\]
接下来,把上上面求得的\(x_p=\frac{nx_e}{-z_e}\)和\(y_p=\frac{ny_e}{-z_e}\)代入刚刚求到的线性关系式得:
\begin{aligned}
x_n &= \frac{2x_p}{r-l}-\frac{r+l}{r-l}\\
&= \frac{2\cdot \frac{n\cdot x_e}{-z_e}}{r-l}-\frac{r+l}{r-l}\\
&= \frac{2n\cdot x_e}{(r-l)(-z_e)} - \frac{r+l}{r-l}\\
&= \frac{\frac{2n}{r-l}\cdot x_e}{-z_e} - \frac{r+l}{r-l}\\
&= \frac{\frac{2n}{r-l}\cdot x_e}{-z_e} + \frac{\frac{r+l}{r-l}\cdot z_e}{-z_e}\\
&= \left. \left(\underbrace{\frac{2n}{r-l}\cdot x_e + \frac{r+l}{r-l}\cdot z_e}_{x_c}\right) \middle/ (-z_e) \right.
\end{aligned}
\end{equation}
\]
\begin{aligned}
y_n &= \frac{2y_p}{t-b} - \frac{t+b}{t-b}\\
&= \frac{2\cdot \frac{n\cdot y_e}{-z_e}}{t-b} - \frac{t+b}{t-b}\\
&= \frac{2n\cdot y_e}{(t-b)(-z_e)} - \frac{t+b}{t-b}\\
&= \frac{\frac{2n}{t-b}\cdot y_e}{-z_e} - \frac{t+b}{t-b}\\
&= \frac{\frac{2n}{t-b}\cdot y_e}{-z_e} + \frac{\frac{t+b}{t-b}\cdot z_e}{-z_e}\\
&= \left. \left(\underbrace{\frac{2n}{t-b}\cdot y_e + \frac{t+b}{t-b}\cdot z_e}_{y_c}\right) \middle/ (-z_e) \right.
\end{aligned}
\end{equation}
\]
注意上面刚刚求得的\(x_n, y_n\)是NDC坐标,而NDC应该是由裁剪坐标除以\(w_c\)得到,也即透视除法(perspective division), \((x_c/w_c, y_c/w_c)\)。又因为,之前我们把\(w_c\)的值设置为\(-z_e\),所以上面\(x_n, y_n\)表达式中括号里的部分表示裁剪空间的坐标\(x_c, y_c\)。
加上上面的两个方程,我们可以找到投影矩阵的第1行和第2行:
\left(
\begin{matrix}
x_c\\
y_c\\
z_c\\
w_c
\end{matrix}
\right)
=\left(
\begin{matrix}
\frac{2n}{r-l} & 0 & \frac{r+l}{r-l} & 0\\
0 & \frac{2n}{t-b} & \frac{t+b}{t-b} & 0\\
\cdot & \cdot & \cdot & \cdot\\
0 & 0 & -1 & 0
\end{matrix}
\right)
\left(
\begin{matrix}
x_e\\
y_e\\
z_e\\
w_e
\end{matrix}
\right)
\end{equation}
\]
现在矩阵只剩下第三行是待求解的。在eye space中\(z_e\)总是被投影到近裁剪面(near plane)上,即值总是为-n。但是我们为了完成裁剪(clipping)和深度测试(depth test),每一个顶点应该具有不同的z值。此外,投影变换应该是可逆的。既然我们知道z不依赖于x和y的值,那么我们就借用w分量来找到\(z_n\)和\(z_e\)之间的关系。因此,我们可以指定第三行长这样:
\left(
\begin{matrix}
x_c\\
y_c\\
z_c\\
w_c
\end{matrix}
\right)
=\left(
\begin{matrix}
\frac{2n}{r-l} & 0 & \frac{r+l}{r-l} & 0\\
0 & \frac{2n}{t-b} & \frac{t+b}{t-b} & 0\\
0 & 0 & A & B\\
0 & 0 & -1 & 0
\end{matrix}
\right)
\left(
\begin{matrix}
x_e\\
y_e\\
z_e\\
w_e
\end{matrix}
\right)
\end{equation},
z_n=z_c/w_c=\frac{Az_e + Bw_e}{-z_e}
\]
因为在eye space中,\(w_e\)总是等于1,因此:
\]
(注意,\(w_c = -z_e, w_e=1\)别搞混淆了)
为了找到系数A和B,我们把\((z_e, z_n)\)之间的关系: (-n, -1)和(-f, 1),代入上面这个等式中,得到:
\left\{
\begin{array}{lr}
\frac{-An+B}{n} = -1 & \\
\frac{-Af+B}{f} = 1 &
\end{array}
\right.
\end{equation}
\\
\Downarrow
\]
\left\{
\begin{array}{lr}
-An + B = -n & (1)\\
-Af + B = f & (2)
\end{array}
\right.
\end{equation}
\]
由方程(1)可得:
\begin{array}{lr}
B=An-n & (1')
\end{array}
\end{equation}
\]
把方程(1')代入到方程(2),可解出A:
\begin{array}{lr}
-Af + (An-n) = f & (2')\\
-(f-n)A=f+n &\\
A=-\frac{f+n}{f-n}&
\end{array}
\end{equation}
\]
把A的值代入方程(1')可求得B:
\begin{aligned}
B &=-n - \left(\frac{f+n}{f-n}\right)n=-\left(1+\frac{f+n}{f-n}\right)n\\
&= -\frac{2fn}{f-n}
\end{aligned}
\end{equation}
\]
有了A和B,则\(z_e\)和\(z_n\)之间的关系表达式为:
\begin{aligned}
z_n = \frac{-\frac{f+n}{f-n}z_e - \frac{2fn}{f-n}}{-z_e} &\quad (3)
\end{aligned}
\end{equation}
\]
最后,完整的投影矩阵为:
\begin{matrix}
\frac{2n}{r-l} & 0 & \frac{r+l}{r-l} & 0\\
0 & \frac{2n}{t-b} & \frac{t+b}{t-b} & 0\\
0 & 0 & \frac{-(f+n)}{f-n} & \frac{-2fn}{f-n}\\
0 & 0 & -1 & 0
\end{matrix}
\right)
\]
上面这是一个通用视景体的投影矩阵。当视景体是对称时,即r=-l, t=-b,则:
\left\{
\begin{array}{lr}
r+l=0\\
r-l=2r
\end{array}
\right.
\end{equation}
\]
\left\{
\begin{array}{lr}
t+b=0\\
t-b=2t
\end{array}
\right.
\end{equation}
\]
故投影矩阵可以简化为:
\begin{matrix}
\frac{n}{r} & 0 & 0 & 0\\
0 & \frac{n}{t} & 0 & 0\\
0 & 0 & \frac{-(f+n)}{f-n} & \frac{-2fn}{f-n}\\
0 & 0 & -1 & 0
\end{matrix}
\right)
\]
透视投影矩阵我们已经求出来了,在继续往下探讨之前,请再看一下上面的方程(3),即:
\begin{aligned}
z_n = \frac{-\frac{f+n}{f-n}z_e - \frac{2fn}{f-n}}{-z_e} &\quad (3)
\end{aligned}
\end{equation}
\]
可以看到它是一个有理函数(rational function),且是一个非线性函数。这意味着在近裁剪面(near plane)附近,它具有很高的精度(very high precision),而在远裁剪面(far plane)附近具有非常小的精度(very little precision)。如果[-n, -f]的范围比较大,它会造成深度值精度问题(z-fighting),即可能在离far plane比较近的地方,当\(z_e\)的值差异较小时,它们对应的\(z_n\)值相同,或者说当一个\(z_e\)值发生小的变化时,对应的\(z_n\)不受影响(即值不变)。这会产生错误的视觉效果。如下面图7所示,在远裁剪面附近,\(z_n\)的值几乎不随\(z_e\)发生变化。
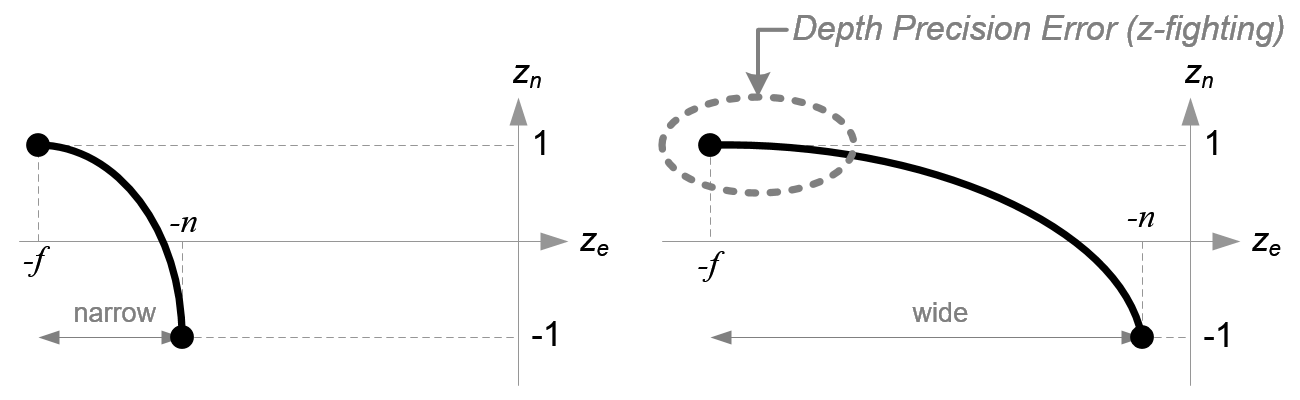
(图7. 深度缓存的精度比较)
一些避免z-fighting的方法:
- 首先也是最重要的技巧是不要把物体放的太近。即使是视觉效果上贴在一块的物体,也可以把它们稍微分开一点,只要肉眼看不到即可。
- 把近裁剪面设置的尽可能远。因为上面说过,离近裁剪面近的地方,精度会高。但这样可能造成离camera很近的物体被裁剪掉。这需要大量实验才能找到适合的距离。
- 尽量缩短n和f之间的距离。这和上一条其实一样。
- 使用更高精度的depth buffer。现在一般depth bufer中depth value使用16, 24或32 bit的flotas。大部分系统使用的是24 bits的floats。因此可以改成使用32 bits的depth buffer。但这样会增加一点性能负担。
三、正交投影
构建正交投影矩阵相对来说会简单一些。
(图8. 正交投影视景体及对应的NDC)
在eye space中,所有\(x_e, y_e, z_e\)分量是线性映射到NDC中的。我们只需要把一个长方体(rectangular volume)所表达的体积缩放成一个立方体(cube),并把它移动到原点(如图8)。下面我们将使用线性映射关系(linear relationship)来找到正交投影矩阵的各个元素。
(图9. 把\(x_e\)映射到\(x_n\))
\begin{aligned}
x_n &= \frac{1-(-1)}{r-l}\cdot x_e + \beta\\
1&=\frac{2r}{r-l} + \beta, (substitute (r, 1) for (x_e, x_n))\\
\beta &= 1 - \frac{2r}{r-l}=-\frac{r+l}{r-l}\\
\therefore x_n &= \frac{2}{r-l}\cdot x_e - \frac{r+l}{r-l}
\end{aligned}
\end{equation}
\]
(图10. 把\(y_e\)映射到\(y_n\))
\begin{aligned}
y_n &= \frac{1-(-1)}{t-b}\cdot y_e + \beta\\
1 &= \frac{2t}{t-b}+\beta, (substitute (t, 1) for (y_e, y_n))\\
\beta &= 1 - \frac{2t}{t-b} = -\frac{t+b}{t-b}\\
\therefore y_n &= \frac{2}{t-b}\cdot y_e - \frac{t+b}{t-b}
\end{aligned}
\end{equation}
\]
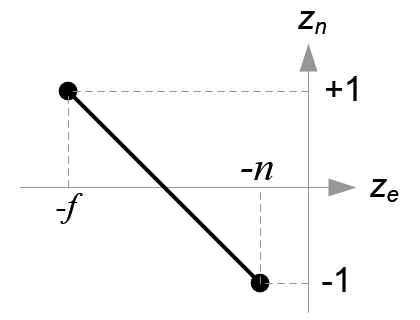
(图11. 把\(z_e\)映射到\(z_n\))
\begin{aligned}
z_n &= \frac{1-(-1)}{-f-(-n)}\cdot z_e + \beta\\
1 &=\frac{2f}{f-n} + \beta, (substitute (-f, 1) for (z_e, z_n))\\
\beta &= 1 - \frac{2f}{f-n}=-\frac{f+n}{f-n}\\
\therefore z_n &= \frac{-2}{f-n}\cdot z_e - \frac{f+n}{f-n}
\end{aligned}
\end{equation}
\]
因为对于正交投影w分量不是必须的,所以正交投影矩阵的第4行为(0, 0, 0, 1)。因此完整的正交投影矩阵为:
\begin{matrix}
\frac{2}{r-l} & 0 & 0 & -\frac{r+l}{r-l}\\
0 & \frac{2}{t-b} & 0 & -\frac{t+b}{t-b}\\
0 & 0 & \frac{-2}{f-n} & -\frac{f+n}{f-n}\\
0 & 0 & 0 & 1
\end{matrix}
\right)
\]
如果视景体对称的话,即r=-l, t=-b, 则:
\left\{
\begin{array}{lr}
r+l=0 \\
r-l=2r
\end{array}
\right.
\end{equation}
\]
\left\{
\begin{array}{lr}
t+b=0 \\
t-b=2r
\end{array}
\right.
\end{equation}
\]
故正交投影矩阵被简化为:
\begin{matrix}
\frac{1}{r} & 0 & 0 & 0\\
0 & \frac{1}{t} & 0 & 0\\
0 & 0 & \frac{-2}{f-n} & -\frac{f+n}{f-n}\\
0 & 0 & 0 & 1
\end{matrix}
\right)
\]
首发于我的知乎专栏
References:
OpenGL投影矩阵(Projection Matrix)构造方法的更多相关文章
- OpenGL投影矩阵【转】
OpenGL投影矩阵 概述 透视投影 正交投影 概述 计算机显示器是一个2D平面.OpenGL渲染的3D场景必须以2D图像方式投影到计算机屏幕上.GL_PROJECTION矩阵用于该投影变换.首先,它 ...
- 【脚下生根】之深度探索安卓OpenGL投影矩阵
世界变化真快,前段时间windows开发技术热还在如火如荼,web技术就开始来势汹汹,正当web呈现欣欣向荣之际,安卓小机器人,咬过一口的苹果,winPhone开发平台又如闪电般划破了混沌的web世界 ...
- OpenGL投影矩阵
概述 透视投影 正交投影 概述 计算机显示器是一个2D平面.OpenGL渲染的3D场景必须以2D图像方式投影到计算机屏幕上.GL_PROJECTION矩阵用于该投影变换.首先,它将所有定点数据从观察坐 ...
- 关于Opengl投影矩阵
读 http://www.songho.ca/opengl/gl_projectionmatrix.html 0.投影矩阵的功能: 将眼睛空间中的坐标点 [图A的视椎体] 映射到 一个 ...
- DX与OpenGL投影矩阵的区别
之前学习DX和OpenGL时到是知道一点,但是没仔细研究过,只是跟着教程抄个公式就过了,看双API引擎时发现转换时是个问题,必须搞懂,gamedev上找了个解释,希望用得上. https://www. ...
- OpenGL中两种计算投影矩阵的函数
OpenGL无意间同时看到两种创建投影矩阵的写法,可以说它们完成的是同样的功能,但写法完全不同,可以观摩一下什么叫做异曲同工之妙... 第一种: gltMakeShadowMatrix函数是重点 // ...
- OpenGL中投影矩阵基础知识
投影矩阵元素Projection Matrix 投影矩阵构建: 当f趋向于正无穷时: 一个重要的事实是,当f趋于正无穷时,在剪裁空间中点的z坐标跟w坐标相等.计算方法如下: 经过透视除法后,z坐标变为 ...
- Android OpenGL ES(六)----进入三维在代码中创建投影矩阵和旋转矩阵
我们如今准备好在代码中加入透视投影了. Android的Matrix类为它准备了两个方法------frustumM()和perspectiveM(). 不幸的是.frustumM()的个缺陷,它会影 ...
- [OpenGL](翻译+补充)投影矩阵的推导
1.简介 基本是翻译和补充 http://www.songho.ca/opengl/gl_projectionmatrix.html 计算机显示器是一个2D的平面,一个3D的场景要被OpenGL渲染必 ...
随机推荐
- 《Machine Learning in Action》—— 浅谈线性回归的那些事
<Machine Learning in Action>-- 浅谈线性回归的那些事 手撕机器学习算法系列文章已经肝了不少,自我感觉质量都挺不错的.目前已经更新了支持向量机SVM.决策树.K ...
- moviepy音视频剪辑:使用autoTrack、manual_tracking+headblur实现半自动追踪人脸打马赛克
一.引言 在<moviepy1.03音视频剪辑:使用manual_tracking和headblur实现追踪人脸打马赛克>介绍了使用手动跟踪跟踪人脸移动轨迹和使用headblur对人脸进行 ...
- PyQt(Python+Qt)学习随笔:QTabWidget选项卡部件的tabBar、count、indexOf方法
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 QTabWidget的每个选项卡都有一个对应的页面部件对象,可用通过count方法获取选项卡个数,可 ...
- java课后作业2019.11.04
一.编写一个程序,指定一个文件夹,能够自动计算出其总容量 1.代码 package HomeWork; import java.io.File; public class getFileDaxiao ...
- Hello TLM
前言 目标 了解TLM程序的基本过程.TLM的英文全称是Transaction Level Modeling,中文翻译为事务级建模.它是在SystemC基础上的一个扩展库. 功能描述 模块A向模块B发 ...
- 两种方式简单免杀ew
1.资源操作法 使用工具: Restorator 2018 BeCyIconGrabber 首先我们从github下载ew使用360进行查杀 打开Restorator 将ew拖入,右键添加资源 选择图 ...
- 剑指offer二刷——数组专题——数组中重复的数字
题目描述 在一个长度为n的数组里的所有数字都在0到n-1的范围内. 数组中某些数字是重复的,但不知道有几个数字是重复的.也不知道每个数字重复几次.请找出数组中任意一个重复的数字. 例如,如果输入长度为 ...
- bootstrap table 控制checkbox在某些状态不显示
首先columns:[{field:'column',checkbox:true}];然后设置$("#tableName").bootstrapTable('hideColumn' ...
- Robot Framework+adb框架自动化测试Android设备案例⑹——源码地址、测试报告
一.源码地址 GitHub:https://github.com/xiongye105554598/DVR8010_AutoTest 二.测试报告
- SpringBoot基于EasyExcel解析Excel实现文件导出导入、读取写入
1. 简介 Java解析.生成Excel比较有名的框架有Apache poi.jxl.但他们都存在一个严重的问题就是非常的耗内存,poi有一套SAX模式的API可以一定程度的解决一些内存溢出的问题 ...