Ubuntu 16.04 安装 mujoco, mujoco_py 和 gym
Mujoco
(1)官网(https://www.roboti.us/license.html)注册 license,教育邮箱注册可以免费使用一年。注意:一个邮箱账号只能供一台主机使用。
- 填写个人信息,点击 Request license,之后会收到一封来自 Roboti LLC Licensing 的邮件,里面有 Account Number
- 填写 Account Number 和 Computer ID(Account Number 在之前的邮件中,Computer ID 运行文本框右侧对应平台的应用程序自动获得)
- 点击 Register computer 后,又会收到一封邮件,内含 mjkey.txt 文件

(2)官网(https://www.roboti.us/index.html)下载相应平台的 product(如 mujoco200 linux),解压到 ~/.mujoco 目录
$ mkdir ~/.mujoco
$ cp mujoco200_linux.zip ~/.mujoco
$ cd ~/.mujoco
$ unzip mujoco200_linux.zip
(3)拷贝 mjkey.txt 文件
$ cp mjkey.txt ~/.mujoco
$ cp mjkey.txt ~/.mujoco/mujoco200_linux/bin
(4)添加环境变量(~/.zshrc 或 ~/.bashrc)
export LD_LIBRARY_PATH=~/.mujoco/mujoco200_linux/bin${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export MUJOCO_KEY_PATH=~/.mujoco${MUJOCO_KEY_PATH}
(5)测试
$ cd ~/.mujoco/mujoco200_linux/bin
$ ./simulate ../model/humanoid.xml
若出现以下画面,说明 mujoco 安装成功

mujoco_py
(1)下载源码
git clone https://github.com/openai/mujoco-py.git
(2)安装 patchelf
$ curl -o /usr/local/bin/patchelf https://s3-us-west-2.amazonaws.com/openai-sci-artifacts/manual-builds/patchelf_0.9_amd64.elf
$ sudo chmod +x /usr/local/bin/patchelf
(3)用 conda 创建一个虚拟环境,并安装依赖
$ conda create --name gymlab python=3.7 # 执行完会在 ~/miniconda3/envs 路径下出现 gymlab 目录
$ conda activate gymlab # 激活 gymlab 虚拟环境
(gymlab) $ cd ~/mujoco-py
(gymlab) $ cp requirements.txt requirements.dev.txt ./mujoco_py
(gymlab) $ cd mujoco_py
(gymlab) $ pip install -r requirements.txt
(gymlab) $ pip install -r requirements.dev.txt
(4)安装
(gymlab) $ cd ~/mujoco-py/vendor
(gymlab) $ ./Xdummy-entrypoint
(gymlab) $ cd ..
(gymlab) $ python setup.py install
(5)测试
(gymlab) $ python
>>> import mujoco_py
# 第一次导入会加载一些东西,再导入一次就正常了
>>> import mujoco_py
Gym
(1)下载源码
git clone https://github.com/openai/gym.git
(2)安装
$ conda activate gymlab
(gymlab) $ cd ~/gym
(gymlab) $ pip install -e '.[all]'
(3)添加环境变量
vim ~/.zshrc
export PYTHONPATH=path/to/gym:$PYTHONPATH
(4)测试
(gymlab) $ python
>>> import gym
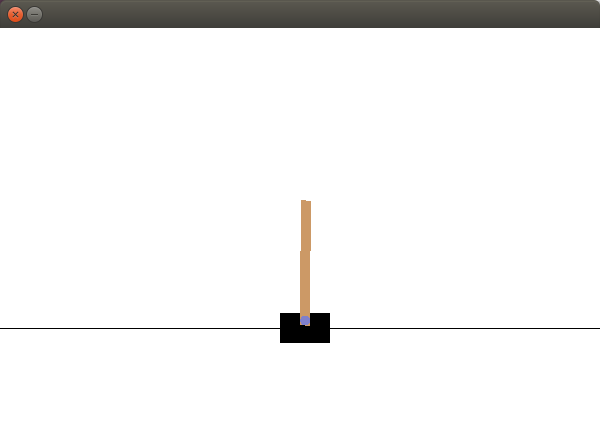
>>> env = gym.make(‘CartPole-v0’)
>>> env.reset()
>>> env.render()
运行结果如下:
Ubuntu 16.04 安装 mujoco, mujoco_py 和 gym的更多相关文章
- Ubuntu 16.04 安装 Kodi v17 “Krypton” Alpha 2
Ubuntu 16.04 安装 Kodi v17 “Krypton” Alpha 2:sudo add-apt-repository ppa:team-xbmc/xbmc-nightlysudo ap ...
- Ubuntu 16.04安装QQ国际版图文详细教程
因工作需要,我安装了Ubuntu 16.04,但是工作上的很多事情需要QQ联系,然而在Ubuntu上的WebQQ很是不好用,于是在网上搜索了好多个Linux版本的QQ,然而不是功能不全 ...
- Ubuntu 16.04 安装Mysql 5.7 踩坑小记
title:Ubuntu 16.04 安装Mysql 5.7 踩坑小记 date: 2018.02.03 安装mysql sudo apt-get install mysql-server mysql ...
- Ubuntu 16.04安装Matlab 2016b教程
由于代码需要依赖Linux环境,只好尝试着装MATLAB,然而各种问题接踵而至,开始了由MATLAB引发的三天Linux探寻之旅-- 下载Matlab 2016b for Linux https:// ...
- ubuntu 16.04 安装 tensorflow-gpu 包括 CUDA ,CUDNN,CONDA
ubuntu 16.04 安装 tensorflow-gpu 包括 CUDA ,CUDNN,CONDA 显卡驱动装好了,如图: 英文原文链接: https://github.com/williamFa ...
- ROS_Kinetic_01 在ubuntu 16.04安装ROS Kinetic 2017.01更新
ROS_Kinetic系列学习(一),在ubuntu 16.04安装ROS Kinetic. Celebrating 9 Years of ROS! ubuntu16.04已经发布半年多了,ROS的K ...
- Ubuntu 16.04 安装 VMware Tools(解决windows和Ubuntu之间不能互相复制粘贴文件的问题)
Ubuntu 16.04安装虚拟工具VMware Tools,指的是在虚拟机VMWare安装Ubuntu 16.04后再安装VMware Tools的过程.很多人接触Linux都是从虚拟机开始,而安装 ...
- Ubuntu 16.04安装JDK(转载)
1.简单的安装方法 安装JDK的最简单方法应该就是使用apt-get来安装了,但是源一般是OpenJDK,如果需要安装Oracle的JDK这种方法就不合适了,直接跳过看下面的章节. 1.使用ctrl+ ...
- Ubuntu 16.04 安装Mysql数据库
系统环境 Ubuntu 16.04; 安装步骤 1.通过以下环境安装mysql服务端与客户端软件 sudo apt-get install mysql-server apt-get isntall m ...
随机推荐
- 轻松定位CPU飙高问题
以下四步轻松定位CPU飙高问题: ①top pid 查看cpu耗CPU进程 ②top -Hp pid 查看该进程所有线程的运行情况,找到占用 CPU 过高的线程 pid ③ printf %x pid ...
- MATLAB小函数:将列向量转化为0-1矩阵
MATLAB小函数:将列向量转化为0-1矩阵 作者:凯鲁嘎吉 - 博客园 http://www.cnblogs.com/kailugaji/ 将列向量转化为0-1矩阵,例如 A = 1 2 1 5 3 ...
- Python 变量与运算符
变量 基本概念: 1. 变量,名字,数据的唯一标识2.变量命名: 字母.数字.下划线: 不能以数字开头: 区分大小写: 不能使用保留字和关键字: 命名要有意义:(多个单词时,推荐使用下划线连接) 3. ...
- c++实现通讯录管理系统(控制台版)
c++实现通讯录管理系统(控制台版) 此项目适合c++初学者,针对c++基础知识,涉及到变量.结构体定义使用.数组定义使用.指针定义使用等. 运行之后的结果如下: 代码: #include <i ...
- 上传图片到七牛云(服务端 node.js sdk)
大体思路 前端要上传图片到七牛云,需要有一个token进行授权操作,而获取这个上传的upload token(以下简称upToken),在服务端需要一定的身份校验,比如说:只有登录的vip用户才能拿到 ...
- git clone克隆项目太慢,或者直接导致克不下来的解决办法(转载请注明出处)
从github下载项目下来,由于项目提交历史过多等各种原因导致文件太大,clone的时候非常的慢,或者直接出现 error: RPC failed; curl 18 transfer closed w ...
- Unity3D_Transform_位置、角度、缩放及其他
1.位置 transforn.position 世界位置 transform.localPosition 相对父类位置 在屏幕左上方显示方法: private void OnGUI() { GUIL ...
- iOS-基于TCP连接<Scoket-服务端>
一:前言(本文为TCP服务端) TCP首先要服务器开放一个端口 然后客户端去连接服务端的IP地址和端口号 连接成功之后再进行数据传输 要经历三次握手 二:代码在GitHub 1.需要的工具类 自行下载 ...
- linux相关(一)
一.调整xshell终端显示的最大行数 1.文件 -> 属性 -> 终端,如下图 2.调整缓冲区大小的行数,确定即可,如下图: 注意:此方法只是修改了连接该主机时的显示行数,其他主机的还是 ...
- 高通平台开机LOGO修改LK(bootloader)下实现【转】
网络上已经有许多在kernel中修改开机Logo的文章,本文就LK下实现开机logo进行简述 需要用到ffmpeg工具,没有安装ffmpeg请参考这里: http://blog.csdn.net/re ...