【翻译】Kinect v2程序设计(C++) Color篇
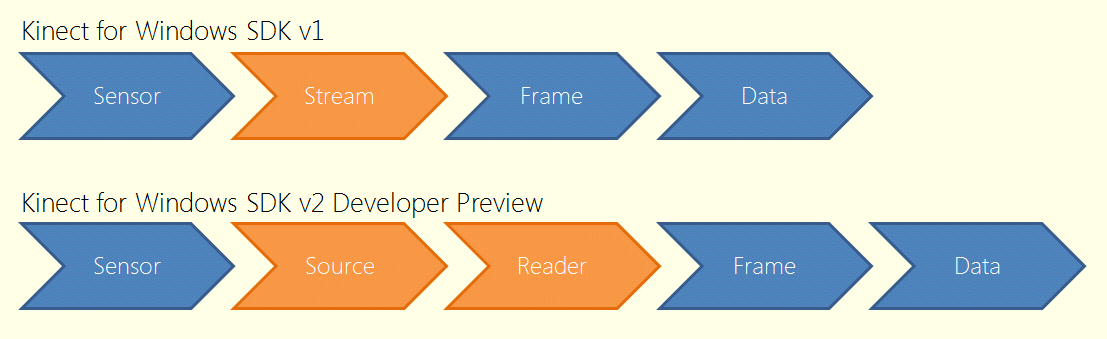
Kinect SDK v2预览版,获取数据的基本流程的说明。以及取得Color图像的示例程序的介绍。
// Sensor
IKinectSensor* pSensor; ……
HRESULT hResult = S_OK;
hResult = GetDefaultKinectSensor( &pSensor ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : GetDefaultKinectSensor" << std::endl;
return -;
}
hResult = pSensor->Open(); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::Open()" << std::endl;
return -;
}列表1.1 相当于图1「Sensor」的部分1 处理Kinect v2预览版的Sensor接口。2 取得默认的Sensor。3 打开Sensor。
从「Sensor」取得「Source」。
// Source
IColorFrameSource* pColorSource; ……
hResult = pSensor->get_ColorFrameSource( &pColorSource ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_ColorFrameSource()" << std::endl;
return -;
}列表1.2 相当于图1「Source」的部分1 获取Color Frame的Source接口。2 从Sensor取得Source。
// Reader
IColorFrameReader* pColorReader; ……
hResult = pColorSource->OpenReader( &pColorReader ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IColorFrameSource::OpenReader()" << std::endl;
return -;
}列表1.3 相当于图1「Reader」的部分1 获取Color Frame的Reader接口。2 从Source打开Reader。
int width = ; ……
int height = ; ……
unsigned int bufferSize = width * height * * sizeof( unsigned char ); ……
cv::Mat bufferMat( height, width, CV_8UC4 ); ……
cv::Mat colorMat( height / , width / , CV_8UC4 ); ……
cv::namedWindow( "Color" );
while( ){
// Frame
IColorFrame* pColorFrame=nullptr; ……
hResult=pColorReader->AcquireLatestFrame( &pColorFrame ); ……
if( SUCCEEDED( hResult ) ){
hResult = pColorFrame->CopyConvertedFrameDataToArray( bufferSize, reinterpret_cast<BYTE*>( bufferMat.data ), ColorImageFormat_Bgra ); ……
if( SUCCEEDED( hResult ) ){
cv::resize( bufferMat, colorMat, cv::Size(), 0.5, 0.5 ); ……
}
}
SafeRelease( pColorFrame );
// Show Window
cv::imshow( "Color", colorMat );
if( cv::waitKey( ) == VK_ESCAPE ){
break;
}
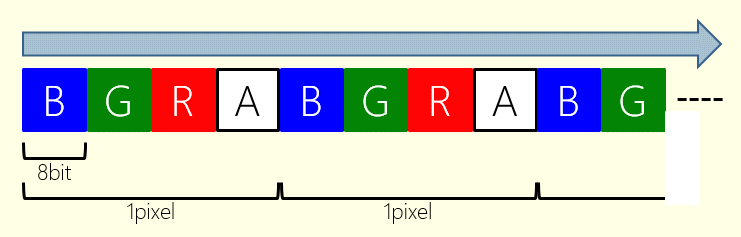
}列表1.4 相当于图1「Frame」,「Data」的部分1 Color图像的尺寸(1920×1080)。这里为了简化说明,画像尺寸用硬编码来设定,示例程序可以从Source取得着Frame信息。2 Color图像的数据尺寸。3 为了处理Color图像,准备OpenCV的cv::Mat。「bufferMat」是原始的图像数据,「colorMat」是Resize图像数据的处理。「CV_8UC4」,是无符号8bit整数(8U),4个channel(C4)并列来表现1个像素的数据格式。4 取得Color图像的Frame接口。5 从Reader取得最新的Frame。6 从Frame取得Color图像。默认的格式是YUY2(亮度与色差表现的格式),不过可以经过简单处理变换为BGRA。7 缩小为长宽各一半的尺寸(960×540)。

【翻译】Kinect v2程序设计(C++) Color篇的更多相关文章
- 【翻译】Kinect v2程序设计(C++) Body 篇
Kinect SDK v2预览版的主要功能的使用介绍,基本上完成了.这次,是关于取得Body(人体姿势)方法的说明. 上一节,是使用Kinect SDK v2预览版从Kinect v2预览版取得B ...
- 【翻译】Kinect v2程序设计(C++-) AudioBeam篇
Kinect v2,Microphone Array可以用来对于水平面音源方向的推测(AudioBeam)和语音识别(Speech Recognition).这一节是介绍如何取得AudioBeam. ...
- 【翻译】Kinect v2程序设计(C++) BodyIndex篇
通过Kinect SDK v2预览版,取得BodyIndex(人体区域)的方法和示例代码. 上一节,介绍了从Kinect v2预览版用Kinect SDK v2预览版获取Depth数据的方法. 这 ...
- 【翻译】Kinect v2程序设计(C++) Depth编
Kinect SDK v2预览版,取得Depth数据的方法说明. 上一节,介绍了通过使用Kinect for Windows SDK v2预览版(以下简称为,Kinect SDK v2预览版)从Kin ...
- 【翻译】Kinect v1和Kinect v2的彻底比较
本连载主要是比较Kinect for Windows的现行版(v1)和次世代型的开发者预览版(v2),以C++开发者为背景介绍进化的硬件和软件.本文主要是对传感的配置和运行条件进行彻底的比较. ...
- 【计算机视觉】深度相机(五)--Kinect v2.0
原文:http://blog.csdn.NET/qq1175421841/article/details/50412994 ----微软Build2012大会:Kinect for Windows P ...
- Ubuntu_ROS中应用kinect v2笔记
Ubuntu_ROS中应用kinect v2笔记 个人觉得最重要的资料如下: 1. Microsoft Kinect v2 Driver Released http://www.ros.org/new ...
- 【计算机视觉】深度相机(六)--Kinect v2.0 手势样本库制作
目录为1.如何使用Kinect Studio录制手势剪辑:2.如何使用Visual Gesture Builder创建手势项目:3.如何在我的C#程序中使用手势:4.关于录制.剪辑手势过程中的注意事项 ...
- Kinect v2.0 for windows开发环境说明
官方文档里是这些: Supported Operating Systems and Architectures The following operating systems and architec ...
随机推荐
- 搭建邮局(邮件服务器) - hmailserver
1.查看服务器mx是否解析成功 nslookup set type=mx 2.hmailserver服务器 smtp设置 3.foxmail 设置 4.使用webmail(after ...
- MySQL日常应用和操作记录
整理MySQL日常操作. 1.知道一个字段名,怎样查到它在数据库里的哪张表里? USE Information_schema;SELECT TABLE_NAME FROM COLUMNS WHERE ...
- hdu 4001 dp 2011大连赛区网络赛A
题意:给一些指定长宽高的砖,求能累出的最大高度,不同砖有不同编号,每种编号对下面的砖做出了限制 dp 注意输出要用%I64d,否则会wa,以后不用%lld了 Sample Input 3 10 10 ...
- Java线程面试题 Top 50
转自:http://www.importnew.com/12773.html 不管你是新程序员还是老手,你一定在面试中遇到过有关线程的问题.Java语言一个重要的特点就是内置了对并发的支持,让Java ...
- Kinect学习笔记(五)——更专业的深度图
这一节的内容就是把深度图转换为彩色图,然后不再使用硬解码,而是继续采用sdk里面封装好的功能来减少测量的误差,以及避免转换为灰度图时,出现绿巨人时候的掉针的bug. 下面直接 ...
- mvc-3模型和数据(2)
寻址引用 源代码现存的问题:当保存或通过find()查找记录时,所返回的实例并没有复制一份,因此对任何属性的修改都会影响原始资源:这里我们只想当调用update()方法时才会修改资源 //由于Mode ...
- Ajax跨域通信方法
1.Jsonp.document.domain+iframe.window.name.window.postMessage.服务器上设置代理页面. 2.Jsonp(json with padding) ...
- 模拟 Codeforces Round #203 (Div. 2) C. Bombs
题目地址:http://codeforces.com/problemset/problem/350/C /* 题意:机器人上下左右走路,把其他的机器人都干掉要几步,好吧我其实没读懂题目, 看着样例猜出 ...
- TODO:C# Socket
http://www.cnblogs.com/licongjie/archive/2006/10/26/540640.html http://blog.csdn.net/ZOU_SEAFARER/ar ...
- css构造文本
1. 1. 文本缩进text-indent:值:值为数字,最常用的数值单位是px(像素),也可以直接是百分比!text-indent:100px;text-indent:10%;2. 文本对齐text ...