webots自学笔记(一)软件界面和简单模型仿真
本人是某非理工类某高校大四狗,由于毕设研究需要使用webots软件,在学习使用webots的过程花费了很多时间。由于这个软件基本没有什么中文资料,所以想把自己所学到的一些东西写下来,如有什么错误的地方,大家可以批评指正。
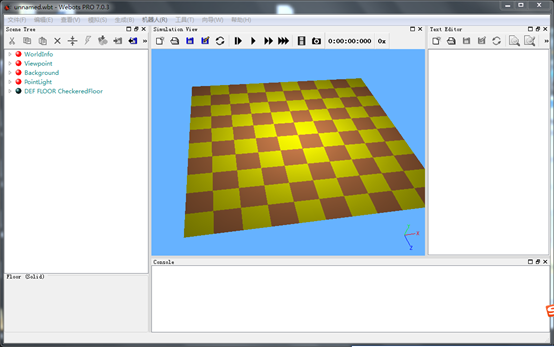
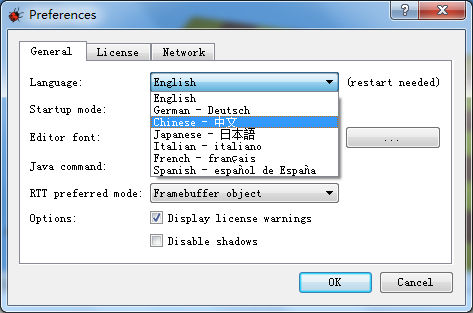
打开webots软件,我使用的是webots pro 7.0.3,界面大概如下,该软件是支持中文的,可以通过Tools->Prefences…选项,在General中language选项改成Chinese-中文。
由于语言已经改成了中文,菜单栏的内容比较简单,在帮助这一栏有用户指南(guide)和参考手册(reference),英语好的同学可以自行阅读学习,其他的在使用到的时候我们再详细介绍。
在界面的左边的窗口是Scene Tree(场景树),模型和环境的建模都在这个窗口。
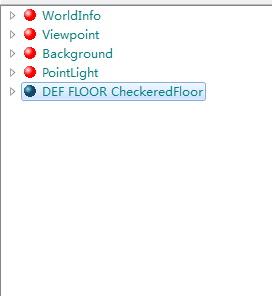
最上面的三个节点是WorldInfo(世界信息)、Viewpoint(视角)、Background(背景),这三项是无法删除的。
WorldInfo里面有仿真物理学的一些参数,我们一般不修改这些参数。
basicTimeStep:这个参数,它代表仿真最小的时间单元,当它为32时,即每次仿真的时间步长为32毫秒。
Gravity:是重力的大小和方向,xyz的方向可以看仿真视图(界面中间Simulation View)的右下角会有一个坐标系,如图没有坐标系,可以在菜单栏:查看->可选显示->显示坐标系统打开。
Physics:搭载物理插件的参数,在后期需要用到机械上的铰链、万向节等结构时需要用到物理插件。
其他的参数意义可以自行查看 参考手册(F4)(reference.pdf) 3.53节 WorldInfo
ViewPoint:里面的参数记录了你在仿真视图中观察的角度和位置,除非特殊需要,可以直接用鼠标左键右键中键点击仿真视图拖拽进行视图调整。follow可以锁定一个节点,在仿真的时候视图跟随其运动。
Bcakground:背景颜色RGB。
接下来的两个节点是PointLight和checkeredFloor,这两个节点是新建时自动添加的,分别是光源和地板,也可见删除自己在新建。这两个节点有位置和大小信息,可以自行修改看看效果。

在场景树上有一排工具栏,前三个分别是剪切 、复制
、复制 、粘贴
、粘贴 ,这三个工具是对节点进行剪切、复制、粘贴的(PS:这个软件没有返回,操作需谨慎)。接下来是删除
,这三个工具是对节点进行剪切、复制、粘贴的(PS:这个软件没有返回,操作需谨慎)。接下来是删除 、重置
、重置 、转换
、转换 、新建
、新建 、导出
、导出 、导入
、导入 、帮助
、帮助 ,这些工具都是对节点进行操作的。
,这些工具都是对节点进行操作的。

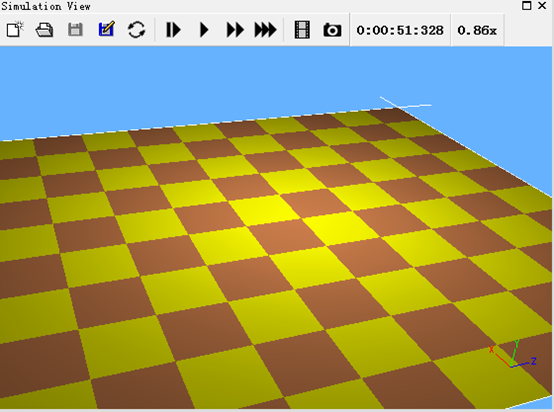
在仿真视图上有一排工具,前五个是新建 、打开
、打开 、保存
、保存 、另存为
、另存为 、重置
、重置 (退回为保存时的状态),都是对世界模型的操作。接下来是一堆像播放的按钮,依次是单步仿真
(退回为保存时的状态),都是对世界模型的操作。接下来是一堆像播放的按钮,依次是单步仿真 、实速仿真
、实速仿真 、加速仿真
、加速仿真 、最快速仿真
、最快速仿真 (不显示画面),然后是录像
(不显示画面),然后是录像 和拍照
和拍照 ,输出视频和图片。最后是仿真时间
,输出视频和图片。最后是仿真时间 和仿真速度
和仿真速度 。
。
最右边的文本编辑窗口,也就是编辑控制器程序的窗口,这次先不介绍。
接下来我们建一个简单的模型,一个球自由落体,看看仿真效果。
在建立模型时,先观察仿真时间是否为0时刻 ,不是的话点击仿真窗口重置按钮
,不是的话点击仿真窗口重置按钮 重新加载世界,因为仿真时间不为0是无法保存的。
重新加载世界,因为仿真时间不为0是无法保存的。
在左边场景树种点击新建 ,选择新节点的Solid(实体)。在Solid节点展开下点击children,新建shape节点,并点击shape节点,在下方DEF中输入qiu,回车,将Shape节点命名为qiu。在shape节点下点击geometry NULL,新建sphere节点。
,选择新节点的Solid(实体)。在Solid节点展开下点击children,新建shape节点,并点击shape节点,在下方DEF中输入qiu,回车,将Shape节点命名为qiu。在shape节点下点击geometry NULL,新建sphere节点。

然后仿真视图,会有个球,一半在地面上,solid节点下的translation改成(0,0.2, 0)。球完全出现在了地板上方。点击boundingObject NULL,新建节点USE下的qiu(Shape),如果USE节点下面没有出现 qiu(Shape),一般是因为之前没有给Shape节点命名。(PS:这个命名不是节点下面的name属性,name属性是控制器会用到的,命名方法是点击节点,在下方DEF中输入)。
添加好了会出现如下图的线框网格,代表这个物体的外边界,即和其他物体发生碰撞的边界,如果没有出现,在场景里点一下球体。
然后在physics NULL中添加physics节点,这个节点下可以设置密度和质量了,默认是密度1000,质量-1,-1代表不适用质量这个属性,如果要设置质量信息,将密度改成-1,质量改成相应值就好了。
然后保存一下世界,预先创建一个文件夹,要创建两级目录,比如D:\webots\robot\robot,因为在后面添加控制器时,软件自动创建D:\webots\robot\controller这个文件夹,为了避免不同项目的控制器不相互干扰,所以创建一个两级目录。点击菜单栏 文件->保存世界。
然后点击一下仿真按钮 ,就能发现球落在了地板上。这样一个简单的自由落体就完成了。
,就能发现球落在了地板上。这样一个简单的自由落体就完成了。
接下来说一下用鼠标简单的移动物体。选中球体,按下Shift+鼠标左键,发现可以在水平面上移动球体。还有其他的按键如下。
Shift+鼠标左键:水平移动物体
Shift+鼠标中间键:铅直移动物体
Shift+鼠标右键:沿xyz轴旋转物体,连续按下shift键,旋转轴会在XYZ依次轮换。(然后你会发现你把粘滞键按出来了,哈哈,强迫症一直按吧,开个玩笑,可以忽略)
Alt+鼠标左键:添加一个力(仿真运行时才有反应)
Alt+鼠标右键:添加一个力矩(仿真运行时才有反应)
自己第一次发这种软件教程。这个例子比较简单,不足以展示这个软件的功能,但是这个软件确实很强大,下一次我会发一个四足机器人的模型建立、传感器输出、还有控制器的编写,大概这个样子。

原创文章,出自"博客园, _阿龙clliu" :http://www.cnblogs.com/clliu/
webots自学笔记(一)软件界面和简单模型仿真的更多相关文章
- webots自学笔记(二)节点与机器人建模
原创文章,出自"博客园, _阿龙clliu" :http://www.cnblogs.com/clliu/ 上一次介绍了界面和一个简单的自由落体,然而在实际运用中,机器人的结构都是 ...
- webots自学笔记(五)使用物理插件ODE建立铰链
原创文章,来自"博客园,_阿龙clliu" http://www.cnblogs.com/clliu/,转载请注明原文章出处. 在一些三维制图软件或仿真软件里,都有运动副的概念,w ...
- webots自学笔记(四)传感器API使用、查看官方文档
原创文章,来自“博客园,_阿龙clliu” http://www.cnblogs.com/clliu/,转载请注明原文章出处. 不能说webots的学习资料少,只能说 ...
- webots自学笔记(六)实用控制器函数补充
原创文章,来自"博客园,_阿龙clliu" http://www.cnblogs.com/clliu/,转载请注明原文章出处. 用Webots软件做机器人仿真时,可以编 ...
- webots自学笔记(三)控制器与电机控制
原创文章,来自“博客园,_阿龙clliu” http://www.cnblogs.com/clliu/,装载请注明原文章出处. 上一次建了四足机器人的模型,模型文件在上一篇有下载地址,这一次用控制器让 ...
- Hadoop自学笔记(三)MapReduce简单介绍
1. MapReduce Architecture MapReduce是一套可编程的框架,大部分MapReduce的工作都能够用Pig或者Hive完毕.可是还是要了解MapReduce本身是怎样工作的 ...
- Hadoop自学笔记(二)HDFS简单介绍
1. HDFS Architecture 一种Master-Slave结构.包括Name Node, Secondary Name Node,Data Node Job Tracker, Task T ...
- CSS自学笔记(10):CSS3盒子模型
CSS3为CSS技术的升级版本.最新版本. 就CSS而言,它是一个模块,是一个庞大而又复杂的模块,但是在CSS3中,将这一个庞大的模块分解为一个个容易理解的同时又很精简的小模块,同时CSS3中又添加了 ...
- CSS自学笔记(6):CSS的模型
CSS 框模型 (Box Model) 规定了元素框处理元素内容.内边距.边框和外边距的方式. 图片来源:w3school.com.cn 元素(element)是一个html文档的实际内容区域,依次由 ...
随机推荐
- git 配置SSH免密
1.安装TortoiseGit(比较简单,直接在官网上下载安装包安装) 2.打开下图标识 点击 generate按钮 生成key(需要等一会) 3.生成Key保存成.ppk文件,记得存放路径,(建 ...
- HTTP的GET方法模拟
进行GET方法的测试 #telnet[ ]10.1.1.11[ ]80 GET[ ]/[ ]HTTP/1.0 [两个回车] HEAD[]/[]HTTP/1.0[回车回车] http://www.cnb ...
- C++编程练习(16)----“排序算法 之 快速排序“
快速排序 基本思想: 通过一趟排序将待排记录分割成独立的两部分,其中一部分记录的关键字均比另一部分记录的关键字小,则可分别对这两部分记录继续进行排序,以达到整个序列有序的目的. 算法介绍: 设要排序的 ...
- js实现省市区联动
先来看看效果图吧,嘻嘻~~~~~~~~~~~~~~~~~~~· 代码在下面: 示例一: html: <!DOCTYPE html> <html> <head> &l ...
- (@WhiteTaken)设计模式学习——单例模式
单例模式,个人理解就是,使用了这个模式,可以保证一个类只生成唯一的实例对象.就是在整个程序中,这个类只存在一个实例对象. GoF对单例模式的定义:保证一个类,只有一个实例存在,同时提供能对该实例加以访 ...
- hadoop系列一:hadoop集群安装
转载请在页首明显处注明作者与出处 http://www.cnblogs.com/zhuxiaojie/p/6384393.html 一:说明 此为大数据系列的一些博文,有空的话会陆续更新,包含大数据 ...
- MVC View显示详解(RenderBody,RenderPage,RenderSection,Partial)
一.Views文件夹 -> Shared文件夹下的 _Layout.cshtml 母版页 @RenderBody 当创建基于_Layout.cshtml布局页面的视图时,视图的内容会和布局页面合 ...
- Linux驱动技术(五) _设备阻塞/非阻塞读写
等待队列是内核中实现进程调度的一个十分重要的数据结构,其任务是维护一个链表,链表中每一个节点都是一个PCB(进程控制块),内核会将PCB挂在等待队列中的所有进程都调度为睡眠状态,直到某个唤醒的条件发生 ...
- foreach和for循环的区别
for循环 for循环,通过下标,对循环中的代码反复执行,功能强大,可以通过index取得元素.在处理比较复杂的处理的时候较为方便. foreach循环 foreach,从头到尾,对于集合中的对象遍历 ...
- mktime性能问题调查
一.问题提出 会议中有同学提到使用mktime遇到一些问题: 1) 设置tm_isdst后速度很慢 2) 设置TZ环境变量提速极大 所以想调查下具体情况. mktime真的这么慢?如果是,为什么? ...