Python+Robot Framework实现UDS诊断自动化测试
一、环境搭建
1.概述
由于项目需要进行UDS诊断测试,所以对这方面进行了研究学习,网上很少能查询到相关资料,故记录一下UDS自动化测试开发过程,由于保密原则,案例都是Demo,希望能帮到感兴趣的朋友。
2.硬件环境

上位机:PCAN
PCAN-USB驱动:https://www.peak-system.com/fileadmin/media/files/pcan-basic.zip
下位机:ECM(发动机控制模块)
3.Python环境
下载地址:https://www.python.org/ftp/python/3.7.9/python-3.7.9-amd64.exe
pip3 install robotframework==3.2.2
pip3 install robotframework-ride==1.7.4.2
pip3 install xlrd==1.2.0
pip3 install udsoncan==1.14
pip3 install python-can==3.3.4
pip3 install can-isotp==1.7
二、项目介绍
1.文件目录

$10--$3E:L2层robot测试用例
Public.robot:L1层关键字方法
UDS_TestReport.zip:自动化测试报告
udstest.py:python封装自定义uds测试方法
UDSTestcase.xlsx:UDS诊断测试用例
2.udstest.py
# _*_ coding:utf-8 _*_ from can.interfaces.pcan.pcan import PcanBus
from udsoncan.connections import PythonIsoTpConnection
import xlrd, os, udsoncan, isotp, sys, binascii class udstest(object):
def __init__(self):
udsoncan.setup_logging() # udslog def get_xlsx(self, sheet):
"获取指定Excel数据"
excel = os.path.join(os.path.dirname(os.path.abspath(__file__)), 'UDSTestcase.xlsx') # 获取用例文件路径
file = xlrd.open_workbook(excel)
list = []
sheet = file.sheet_by_name(sheet) # 获得指定sheet数据
row_value1 = sheet.row_values(0) # 获取第1行的标题
nrows = sheet.nrows # 获取当前sheet行数
ncols = sheet.ncols # 获取当前sheet列数
for i in range(1, nrows): # 从第2行遍历当前sheet
row = sheet.row_values(i) # 获取行数据
dict = {} # 创建空字典
for j in range(0, ncols): # 遍历sheet列,组成字典
if row_value1[j] == 'NO.':
dict[row_value1[j]] = int(row[j])
else:
dict[row_value1[j]] = row[j] # 从第一列开始,将每一列的数据与第1行的数据组成一个键值对,形成字典
list.append(dict) # 将字典添加list中
return list def set_can(self, txid, rxid):
"""can总线相关配置"""
if isinstance(txid, str) or isinstance(rxid, str):
txid = eval(txid)
rxid = eval(rxid)
isotp_params = {
'stmin': 5, # 流控帧间隔时间,0-127ms 或 100-900ns 值从 0xF1-0xF9
'blocksize': 0, # 流控帧单包大小,0表示不限制
'tx_padding': 0, # 当 notNone表示用于填充发送的消息的字节。
'rx_flowcontrol_timeout': 1000, # 在停止接收和触发之前等待流控制帧的毫秒数
'rx_consecutive_frame_timeout': 1000, # 在停止接收和触发 a 之前等待连续帧的毫秒数
}
try:
self.canbus = PcanBus(channel='PCAN_USBBUS1', bitrate=500000) # CAN总线初始化
self.tp_addr = isotp.Address(isotp.AddressingMode.Normal_29bits, txid=txid, rxid=rxid) # 网络层寻址方法
tp_stack = isotp.CanStack(bus=self.canbus, address=self.tp_addr, params=isotp_params) # 网络/传输层(IsoTP 协议)
self.conn = PythonIsoTpConnection(tp_stack) # 应用层和传输层之间建立连接 except:
print(sys.exc_info()[1])
else:
print('CAN配置成功') def uds_request_respond(self, request_command):
"""发送uds请求和接收uds响应"""
if not isinstance(request_command, str): # 判断request_command数据类型
request_command = str(int(request_command))
requestPdu = binascii.a2b_hex(request_command.replace(' ', '')) # 处理request_command
if not self.conn.is_open():
self.conn.open() # 打开连接
try:
self.conn.specific_send(requestPdu) # 发送uds请求
except:
print("发送请求失败")
else:
print('UDS发送请求:%s' % request_command) try:
respPdu = self.conn.specific_wait_frame(timeout=3) # 接收uds响应
except:
print('响应数据失败')
else:
res = respPdu.hex().upper()
respond = ''
for i in range(len(res)):
if i % 2 == 0:
respond += res[i]
else:
respond += res[i] + ' '
print('UDS响应结果:%s' % respond)
self.conn.close() # 关闭连接
self.canbus.shutdown() # 关闭总线
return respond.strip()
3.UDSTestcase.xlsx

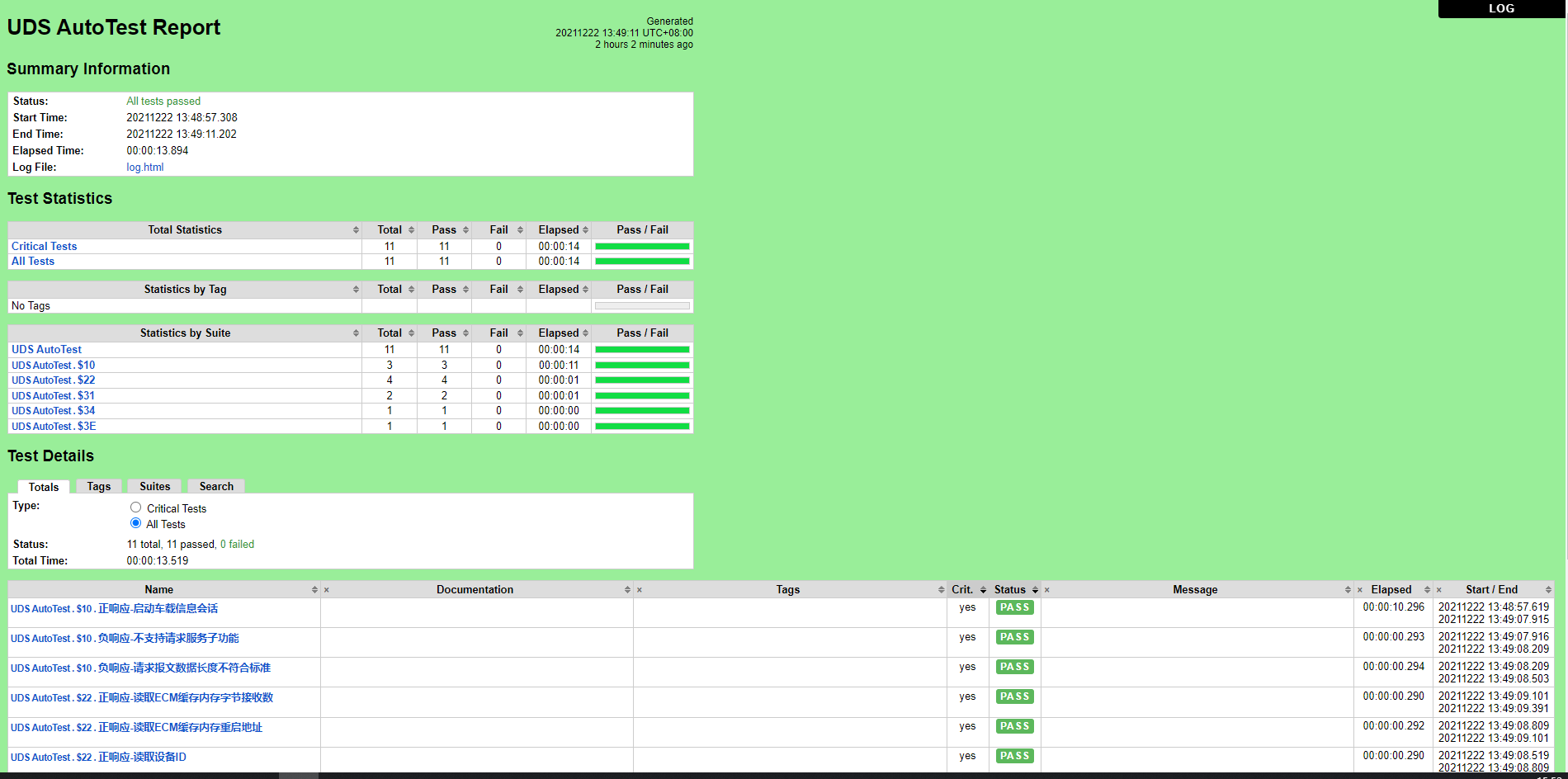
3.UDS_TestReport
三、源码地址
git:https://github.com/xiongye105554598/UDS_AutoTest.git
Python+Robot Framework实现UDS诊断自动化测试的更多相关文章
- python+robot framework实现测报告定制化和邮件发送
前面已经介绍了python+robot framework自动化框架和基本原理的实现,详情请看 python+robot framework接口自动化测试 本章主要讲解报告已经产生那如何以自动化的方式 ...
- Linux CentOS下Python+robot framework环境搭建
Linux CentOS下Python+robot framework环境搭建 by:授客 QQ:1033553122 操作系统环境:CentOS 6.5-x86_64 下载地址:http://w ...
- python+robot framework接口自动化测试
python+requests实现接口的请求前篇已经介绍,还有不懂或者疑问的可以访问 python+request接口自动化框架 目前我们需要考虑的是如何实现关键字驱动实现接口自动化输出,通过关键字的 ...
- Linux CentOS下Python+robot framework环境搭建
转载自:http://blog.sina.com.cn/s/blog_13cc013b50102vof1.html 操作系统环境:CentOS 6.5-x86_64 下载地址:http://www.c ...
- Robot Framework与Web界面自动化测试学习笔记:简单例子
假设环境已经搭建好了.这里用RIDE( Robot Framework Test Data Editor)工具来编写用例.下面我们对Robot Framework简称rf. 我们先考虑下一个最基本的登 ...
- Python + Robot Framework 环境搭建
一.Python 安装 说明:由于RIDE是基于python2.x开发,后期未做python3.x兼容,所以这里安装python2.7. 链接: https://pan.baidu.com/s/1yf ...
- Robot Framework与Web界面自动化测试:简单例子
假设环境已经搭建好了.这里用RIDE( Robot Framework Test Data Editor)工具来编写用例.下面我们对Robot Framework简称rf. 我们先考虑下一个最基本的登 ...
- <转>准备Eclips+python+robot framework环境
关于python: path添加:C:\Python27;C:\Python27\Scripts; 新加一项: PYTHON_HOME C:\Python27 再不行的话,加一个用户变量: P ...
- Robot Framework进行web ui自动化测试,浏览器配置说明
转载请注明出处,谢谢: chrome浏览器: 1.从如下地址下载与本地浏览器版本号一致的chromedriver.exe驱动文件: http://chromedriver.storage.google ...
随机推荐
- gitee+typro+picgo搭建博客图床
gitee+typro+picgo搭建博客图床 前提环境 typro.picgo.nodejs 直接在官网下载即可 下载完成后,打开picgo 安装插件gitee-uploader 1.1-2即可显示 ...
- Java LinkedList小记
1. 基本用法 LinkedList实现了List.Deque.Queue接口,可以按照队列.栈和双端队列的方式进行操作.LinkedList有两个构造方法,一个是默认构造,另一个接受Collecti ...
- 通过Rainbond的团队管理去管理已有的组织架构
针对于多团队管理我先列举几个小问题,看看大家有没有共鸣,我们在刚刚接触并使用Rainbond的时候,仅仅创建一个团队,里面创建一大堆应用,看起来特别乱,进行管理的时候呢,也会非常麻烦,尤其是当团队需要 ...
- 搭建简单的SpringCloud项目三:问题及解决
GitHub:https://github.com/ownzyuan/test-cloud 前篇:搭建简单的SpringCloud项目一:注册中心和公共层 搭建简单的SpringCloud项目二:服务 ...
- 华为AppTouch携手全球运营商,助力开发者出海
内容来源:华为开发者大会2021 HMS Core 6 APP services技术论坛,主题演讲<华为AppTouch携手全球运营商,助力开发者出海>. 演讲嘉宾:华为消费者云服务App ...
- A Child's History of England.42
The names of these knights were Reginald Fitzurse, William Tracy, Hugh de Morville, and Richard Brit ...
- Spark(八)【广播变量和累加器】
目录 一. 广播变量 使用 二. 累加器 使用 使用场景 自定义累加器 在spark程序中,当一个传递给Spark操作(例如map和reduce)的函数在远程节点上面运行时,Spark操作实际上操作的 ...
- stlink 无法再keil中识别 按下复位键可以识别
最近遇到一个很是头痛的问题 本来板子是好好的,就是从公司带回的家里 然后再次用stlink烧写程序的时候就出现了问题: 但是查看电脑端,上面是有stlink的 也就是电脑是好的, 我立刻又试了一下家中 ...
- adb命令对app进行测试
1.何为adb adb android debug bridge ,sdk包中的工具,将Platform-tooks 和tools 两个路径配置到环境变量中 2.SDK下载链接:http://t ...
- Xcode功能快捷键
隐藏xcode command+h退出xcode command+q关闭窗口 command+w关闭所有窗口 command+option+w关闭当前项目 command+control+w关闭当前文 ...