Python+Robot Framework实现UDS诊断自动化测试
一、环境搭建
1.概述
由于项目需要进行UDS诊断测试,所以对这方面进行了研究学习,网上很少能查询到相关资料,故记录一下UDS自动化测试开发过程,由于保密原则,案例都是Demo,希望能帮到感兴趣的朋友。
2.硬件环境

上位机:PCAN
PCAN-USB驱动:https://www.peak-system.com/fileadmin/media/files/pcan-basic.zip
下位机:ECM(发动机控制模块)
3.Python环境
下载地址:https://www.python.org/ftp/python/3.7.9/python-3.7.9-amd64.exe
pip3 install robotframework==3.2.2
pip3 install robotframework-ride==1.7.4.2
pip3 install xlrd==1.2.0
pip3 install udsoncan==1.14
pip3 install python-can==3.3.4
pip3 install can-isotp==1.7
二、项目介绍
1.文件目录

$10--$3E:L2层robot测试用例
Public.robot:L1层关键字方法
UDS_TestReport.zip:自动化测试报告
udstest.py:python封装自定义uds测试方法
UDSTestcase.xlsx:UDS诊断测试用例
2.udstest.py
# _*_ coding:utf-8 _*_ from can.interfaces.pcan.pcan import PcanBus
from udsoncan.connections import PythonIsoTpConnection
import xlrd, os, udsoncan, isotp, sys, binascii class udstest(object):
def __init__(self):
udsoncan.setup_logging() # udslog def get_xlsx(self, sheet):
"获取指定Excel数据"
excel = os.path.join(os.path.dirname(os.path.abspath(__file__)), 'UDSTestcase.xlsx') # 获取用例文件路径
file = xlrd.open_workbook(excel)
list = []
sheet = file.sheet_by_name(sheet) # 获得指定sheet数据
row_value1 = sheet.row_values(0) # 获取第1行的标题
nrows = sheet.nrows # 获取当前sheet行数
ncols = sheet.ncols # 获取当前sheet列数
for i in range(1, nrows): # 从第2行遍历当前sheet
row = sheet.row_values(i) # 获取行数据
dict = {} # 创建空字典
for j in range(0, ncols): # 遍历sheet列,组成字典
if row_value1[j] == 'NO.':
dict[row_value1[j]] = int(row[j])
else:
dict[row_value1[j]] = row[j] # 从第一列开始,将每一列的数据与第1行的数据组成一个键值对,形成字典
list.append(dict) # 将字典添加list中
return list def set_can(self, txid, rxid):
"""can总线相关配置"""
if isinstance(txid, str) or isinstance(rxid, str):
txid = eval(txid)
rxid = eval(rxid)
isotp_params = {
'stmin': 5, # 流控帧间隔时间,0-127ms 或 100-900ns 值从 0xF1-0xF9
'blocksize': 0, # 流控帧单包大小,0表示不限制
'tx_padding': 0, # 当 notNone表示用于填充发送的消息的字节。
'rx_flowcontrol_timeout': 1000, # 在停止接收和触发之前等待流控制帧的毫秒数
'rx_consecutive_frame_timeout': 1000, # 在停止接收和触发 a 之前等待连续帧的毫秒数
}
try:
self.canbus = PcanBus(channel='PCAN_USBBUS1', bitrate=500000) # CAN总线初始化
self.tp_addr = isotp.Address(isotp.AddressingMode.Normal_29bits, txid=txid, rxid=rxid) # 网络层寻址方法
tp_stack = isotp.CanStack(bus=self.canbus, address=self.tp_addr, params=isotp_params) # 网络/传输层(IsoTP 协议)
self.conn = PythonIsoTpConnection(tp_stack) # 应用层和传输层之间建立连接 except:
print(sys.exc_info()[1])
else:
print('CAN配置成功') def uds_request_respond(self, request_command):
"""发送uds请求和接收uds响应"""
if not isinstance(request_command, str): # 判断request_command数据类型
request_command = str(int(request_command))
requestPdu = binascii.a2b_hex(request_command.replace(' ', '')) # 处理request_command
if not self.conn.is_open():
self.conn.open() # 打开连接
try:
self.conn.specific_send(requestPdu) # 发送uds请求
except:
print("发送请求失败")
else:
print('UDS发送请求:%s' % request_command) try:
respPdu = self.conn.specific_wait_frame(timeout=3) # 接收uds响应
except:
print('响应数据失败')
else:
res = respPdu.hex().upper()
respond = ''
for i in range(len(res)):
if i % 2 == 0:
respond += res[i]
else:
respond += res[i] + ' '
print('UDS响应结果:%s' % respond)
self.conn.close() # 关闭连接
self.canbus.shutdown() # 关闭总线
return respond.strip()
3.UDSTestcase.xlsx

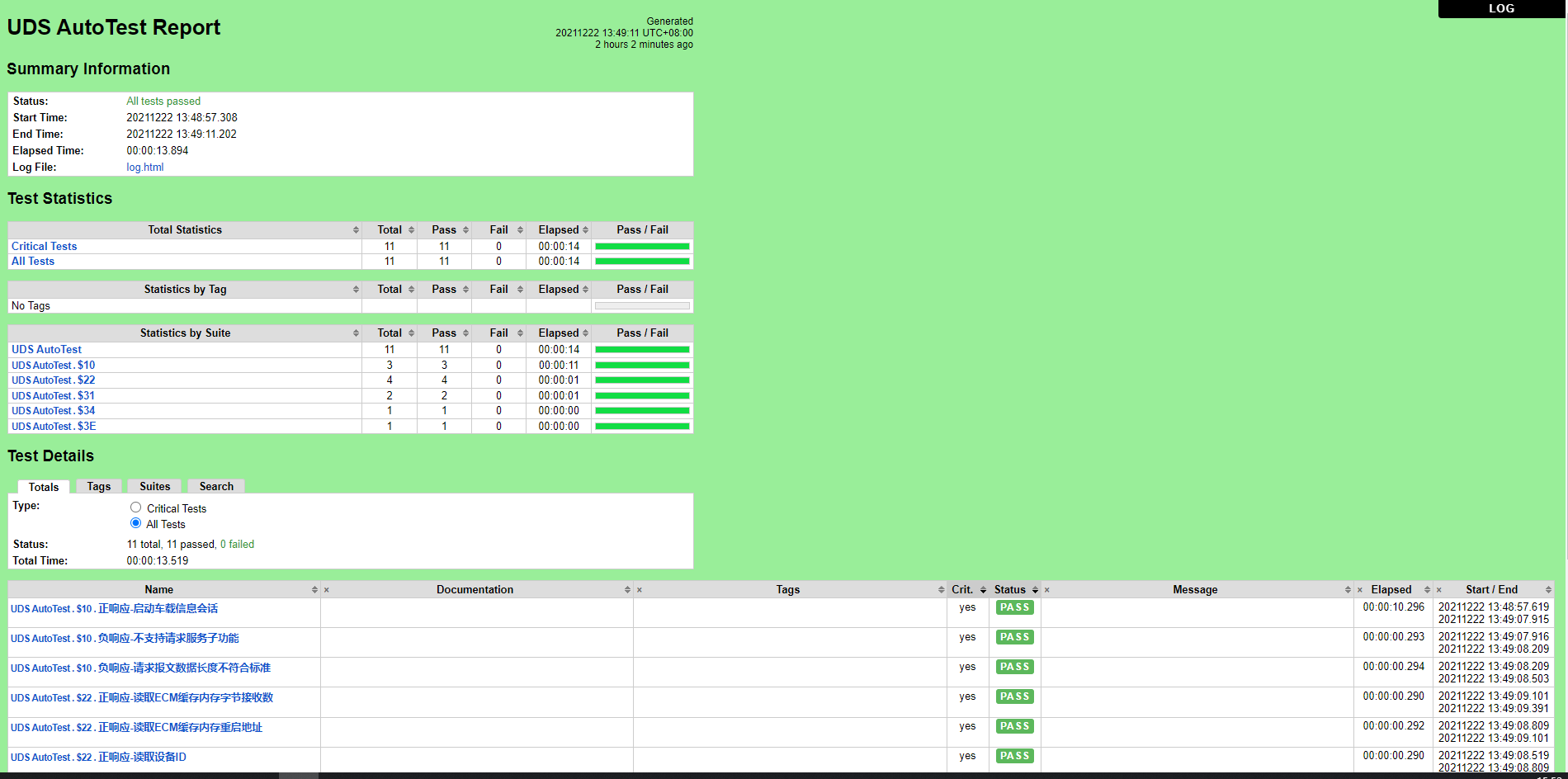
3.UDS_TestReport
三、源码地址
git:https://github.com/xiongye105554598/UDS_AutoTest.git
Python+Robot Framework实现UDS诊断自动化测试的更多相关文章
- python+robot framework实现测报告定制化和邮件发送
前面已经介绍了python+robot framework自动化框架和基本原理的实现,详情请看 python+robot framework接口自动化测试 本章主要讲解报告已经产生那如何以自动化的方式 ...
- Linux CentOS下Python+robot framework环境搭建
Linux CentOS下Python+robot framework环境搭建 by:授客 QQ:1033553122 操作系统环境:CentOS 6.5-x86_64 下载地址:http://w ...
- python+robot framework接口自动化测试
python+requests实现接口的请求前篇已经介绍,还有不懂或者疑问的可以访问 python+request接口自动化框架 目前我们需要考虑的是如何实现关键字驱动实现接口自动化输出,通过关键字的 ...
- Linux CentOS下Python+robot framework环境搭建
转载自:http://blog.sina.com.cn/s/blog_13cc013b50102vof1.html 操作系统环境:CentOS 6.5-x86_64 下载地址:http://www.c ...
- Robot Framework与Web界面自动化测试学习笔记:简单例子
假设环境已经搭建好了.这里用RIDE( Robot Framework Test Data Editor)工具来编写用例.下面我们对Robot Framework简称rf. 我们先考虑下一个最基本的登 ...
- Python + Robot Framework 环境搭建
一.Python 安装 说明:由于RIDE是基于python2.x开发,后期未做python3.x兼容,所以这里安装python2.7. 链接: https://pan.baidu.com/s/1yf ...
- Robot Framework与Web界面自动化测试:简单例子
假设环境已经搭建好了.这里用RIDE( Robot Framework Test Data Editor)工具来编写用例.下面我们对Robot Framework简称rf. 我们先考虑下一个最基本的登 ...
- <转>准备Eclips+python+robot framework环境
关于python: path添加:C:\Python27;C:\Python27\Scripts; 新加一项: PYTHON_HOME C:\Python27 再不行的话,加一个用户变量: P ...
- Robot Framework进行web ui自动化测试,浏览器配置说明
转载请注明出处,谢谢: chrome浏览器: 1.从如下地址下载与本地浏览器版本号一致的chromedriver.exe驱动文件: http://chromedriver.storage.google ...
随机推荐
- vue 事件监听和es6模板语法
es6模板语法的反引号是通过左上角的飘字符弄出来了,学废了吗?
- mybatis-批量操作数据(list对象 )
在实际工作中老是忘记 传入的参数和数据库参数名称要一致还是与实体类型一致导致很多笑话发生. 那我还是做个记录吧! dao层: int addRemark(@Param("list" ...
- [spring-core]作用域
本文试图从原理上讲解Spring IoC容器的作用域机制,建议对着源码阅读,事半功倍. 0 引入问题 当我们谈到Spring作用域的时候,自然而然会想到如下作用域(来自spring-core官方文档) ...
- 洛谷 P5502 - [JSOI2015]最大公约数(区间 gcd 的性质+分治)
洛谷题面传送门 学校模拟赛的某道题让我联想到了这道题-- 先讲一下我的野鸡做法. 首先考虑分治,对于左右端点都在 \([L,R]\) 中的区间我们将其分成三类:完全包含于 \([L,mid]\) 的区 ...
- 3D-DNA 挂载染色体
3D-DNA是一款简单,方便的处理Hi-C软件,可将contig提升到染色体水平.其githup网址:https://github.com/theaidenlab/3d-dna 3D-DNA流程简介 ...
- 【数据库】本地KEGG数据库如何拆分子库?
目录 KEGG本地库文件 按物种拆分KEGG数据库 1.获得物种分类信息 2.获得物种分类的序列信息并建库 3.获得物种分类的K-ko对应文件 根据相似性原理,序列相似,功能相似,所有功能注释无非是用 ...
- R shinydashboard ——1. 基本用法
shiny和shinydashboard使用虽然简单,但控件众多,需及时总结归纳. install.packages("shinydashboard") shinydashboar ...
- linux 两服务器之间的文件传输scp
Linux scp 命令用于 Linux 之间复制文件和目录. scp 是 secure copy 的缩写, scp 是 linux 系统下基于 ssh 登陆进行安全的远程文件拷贝命令. scp 是加 ...
- TCP三次握手与Linux的TCP内核参数优化
感谢各位技术大佬的资料分享,这里我把我理解的内容做一个整理 一:TCP的三次握手 1.TCP简述 TCP是一个面向连接的协议,在连接双方发送数据之前,首先需要建立一条连接.TCP建立连接可以简单称为: ...
- 03 Windows安装Java环境
Java环境安装 使用微信扫码关注微信公众号,并回复:"Java环境",免费获取下载链接! 1.卸载(电脑未装此程序,跳过此过程) 找到电脑上面的控制面板 找到这两个文 ...