机器人学 —— 机器人感知(Kalman Filter)
对于机器人感知任务而言,经常需要预判物体的运动,保证机器人在物体与自身接触之前进行规避。比如无人机与障碍物的碰撞,足球机器人判断足球的位置。预判的前提是对当前状态进行准确的估计,比如足球的速度,障碍物靠近的速度。一般认为,测量是存在误差的 —— 眼见未必为实。

1、物体的运动学模型
物体的运动学模型使用状态向量来表达。以2维空间的质点运动为例,物体的运动学模型可以表达为 x = [ px py vx vy ]' 。其中 px py 表示物体的位置,vx vy 表示物体的速度。如果能够准确估计物体当前状态x 就可以对其一段时间后的状态进行判断。然而当前状态的测量噪声会对x 的估计产生干扰。Kalman Filter 的作用就是去除这些干扰。
卡尔曼滤波器的原理是使用马尔科夫链来对随机变量进行推测。马尔科夫链是一种特殊的贝叶斯网络,所以卡尔曼滤波器实际上是一种贝叶斯滤波器。其Graph Model 如下所示:


这里需要指出的是 Xt-1 实际是未知的,但是我们以其估计量来作为实际值的最优估计。对于给定PGM,我们使用高斯分布来对随机变量进行建模 —— 高斯分布的几大优点见上篇博客。在不考虑子节点(还没有发生),父节点又被认为是给定的情况下,当前节点的CPD可以认为是父节点与观测节点的Factor product. 如果我们使用高斯模型进行建模,则factor 如下:
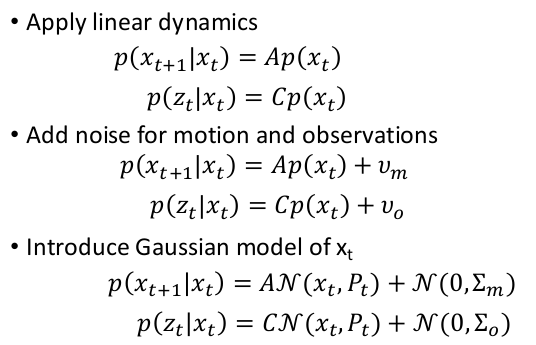


其中,A代表转移矩阵,给定 t 时刻的状态,t+1时刻则由转移矩阵确定。vm 则表示转移噪声 —— t+1 时刻与 t 时刻中,速度不是常量。 vo 表示观测噪声 —— 我们对测量的肯定程度。使用高斯模型建模后,我们可以得到p(xt+1|xt) 与p(zt|xt) 的分布。第一个定义了xt+1|xt 的 factor ,第二个定义了观测模型的factor. 于是,我们可以用贝叶斯公式求取 p(xt|xt-1, zt-1 ) .


这里需要指出的是,一旦给定了zt 的父节点 xt , 那么zt 和 xt-1 是 d- Seperate 的。所以 P(zt|xt,xt-1) = P(zt|xt).
2、最大后验估计

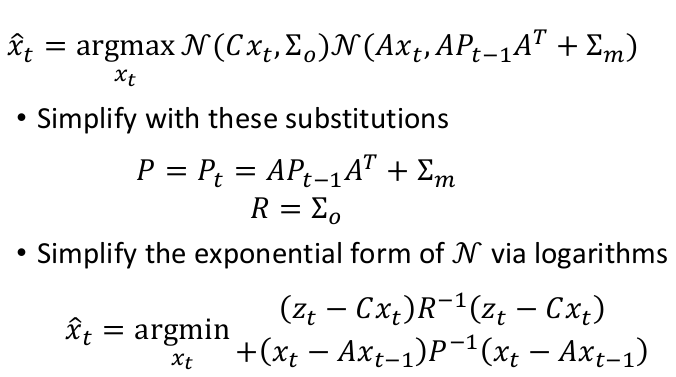




最大后验估计对象如上,按照上述公式即可实现卡尔曼滤波器。实现后的误差及预测结果如图:
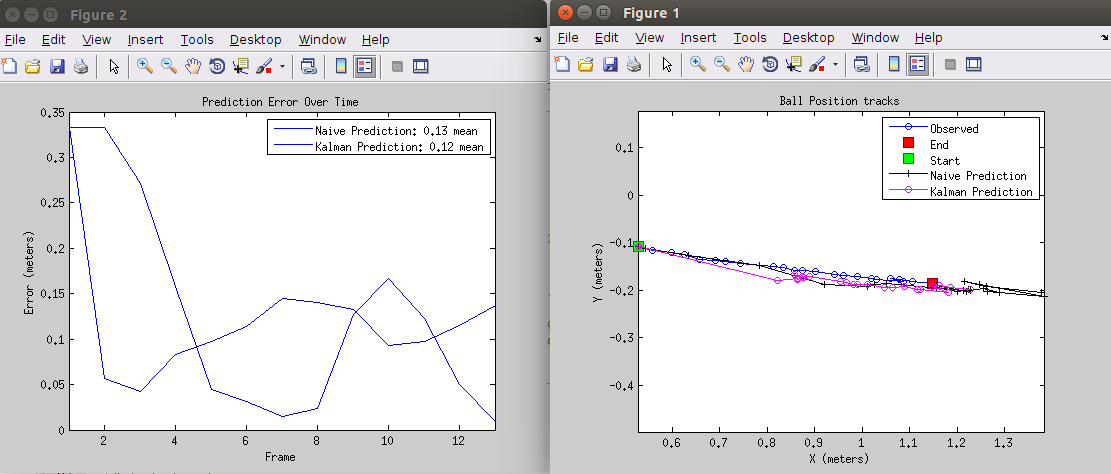
卡尔曼滤波器的设计技巧在于,如果物体不是匀加速运动(如足球的滚动),那么位置方差可以给的较小(认为我们的运动跟踪算法帧率足够高,且相机检测够准),但是!!!速度方差一定要给的够大,以保证能够模拟变加速状态!!!
机器人学 —— 机器人感知(Kalman Filter)的更多相关文章
- 机器人学 —— 机器人感知(Gaussian Model)
机器人感知是UPNN机器人专项中的最后一门课程,其利用视觉方法来对环境进行感知.与之前提到的机器人视觉不同,机器人感知更侧重于对环境物体的识别与检测.与计算机视觉不同,机器人视觉所识别的物体往往不需要 ...
- 机器人学 —— 机器人感知(Location)
终于完成了Robotic SLAM 所有的内容了.说实话,课程的内容比较一般,但是作业还是挺有挑战性的.最后一章的内容是 Location. Location 是 Mapping 的逆过程.在给定ma ...
- 机器人学 —— 机器人感知(Mapping)
对于移动机器人来说,最吸引人的莫过于SLAM,堪称Moving Robot 皇冠上的明珠.Perception 服务于 SLAM,Motion Plan基于SLAM.SLAM在移动机器人整个问题框架中 ...
- 无人驾驶技术之Kalman Filter原理介绍
基本思想 以K-1时刻的最优估计Xk-1为准,预测K时刻的状态变量Xk/k-1,同时又对该状态进行观测,得到观测变量Zk,再在预测与观之间进行分析,或者说是以观测量对预测量进行修正,从而得到K时刻的最 ...
- 卡尔曼滤波(Kalman Filter)在目标边框预测中的应用
1.卡尔曼滤波的导论 卡尔曼滤波器(Kalman Filter),是由匈牙利数学家Rudolf Emil Kalman发明,并以其名字命名.卡尔曼出生于1930年匈牙利首都布达佩斯.1953,1954 ...
- 泡泡一分钟:Robust Attitude Estimation Using an Adaptive Unscented Kalman Filter
张宁 Robust Attitude Estimation Using an Adaptive Unscented Kalman Filter 使用自适应无味卡尔曼滤波器进行姿态估计链接:https: ...
- 一文搞懂 SLAM 中的Extension Kalman Filter 算法编程
作者 | Doreen 01 问题描述 预先知道事物未来的状态总是很有价值的! √ 预知台风的路线可以避免或减轻重大自然灾害的损失. √ 敌国打过来的导弹,如果能够高精度预测轨迹,就能有效拦截. √ ...
- 卡尔曼滤波器 Kalman Filter (转载)
在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”.跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人! 卡 尔曼全名Rudolf Emil ...
- 卡尔曼滤波—Simple Kalman Filter for 2D tracking with OpenCV
之前有关卡尔曼滤波的例子都比较简单,只能用于简单的理解卡尔曼滤波的基本步骤.现在让我们来看看卡尔曼滤波在实际中到底能做些什么吧.这里有一个使用卡尔曼滤波在窗口内跟踪鼠标移动的例子,原作者主页:http ...
随机推荐
- Daily Scrum5
总体来说,我们今天的工作遇到了一些阻碍.前期的对于代码的大量阅读并没有使我们的进度突飞猛进.今天我们完成了关于敏感词汇辨别优化和防滥用部分的代码(之后会有微博来详细介绍),但是我们无法运行程序并测试, ...
- 第一个完整的cppunit单元测试程序
在极限编程中,测试程序本应该在编写主程序之前就要写好,然后将写好的类程序放在测试程序中进行测试,但考虑到项目中需求文档等并未将接口定义好,我无从开始,而且,自己对单元测试也是刚刚熟悉,需要一边写测试程 ...
- 【Subsets】cpp
题目: Given a set of distinct integers, nums, return all possible subsets. Note: Elements in a subset ...
- 【Largest Rectangle in Histogram】cpp
题目: Given n non-negative integers representing the histogram's bar height where the width of each ba ...
- netty 入门
先啰嗦两句,使用 netty 来搭建服务器程序,可以发现相比于传统的 nio 程序, netty 的代码更加简洁,开发难度更低,扩展性也很好,非常适合作为基础通信框架. 下面上代码: Server p ...
- mp3 切割
开源的东东很不错,摘了一段好文: 常在听mp3或其他格式音乐的朋友,有时会有特别喜欢的片段,例如副歌的部份会想拿来做手机的铃声.这时候就需要一些处理音效的软体,例如之前提过的 Audacity.其实还 ...
- 802.11 wireless 六
802.11 wireless 6Bluetooth蓝牙1.无线个人网络(WPAN)的无线电系统2.普通链路范围 10米/0dBm(100米/20dBm)3.传输频率在2.402 GHZ和2.480 ...
- 【BZOJ】【3831】【POI2014】Little Bird
DP/单调队列优化 水题水题水题水题 单调队列优化的线性dp…… WA了8次QAQ,就因为我写队列是[l,r),但是实际操作取队尾元素的时候忘记了……不怎么从队尾取元素嘛……平时都是直接往进放的……还 ...
- Leetcode#87 Scramble String
原题地址 两个字符串满足什么条件才称得上是scramble的呢? 如果s1和s2的长度等于1,显然只有s1=s2时才是scramble关系. 如果s1和s2的长度大于1,那么就对s1和s2进行分割,划 ...
- ZOJ Monthly, July 2015
B http://acm.zju.edu.cn/onlinejudge/showProblem.do?problemId=5552 输入n,表示有n个数1到n.A先拿,B后拿,依次拿,每次可以拿任意一 ...