《机器人SLAM导航核心技术与实战》先导课:如何安装Ubuntu系统
- 先 导 课
- 第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
- 第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
- 第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
- 答 疑 课



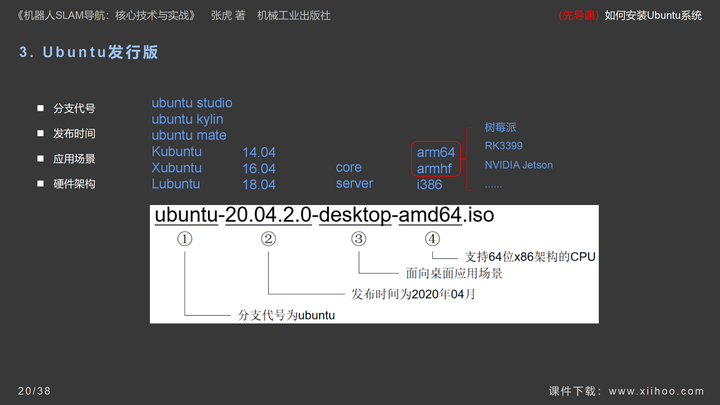

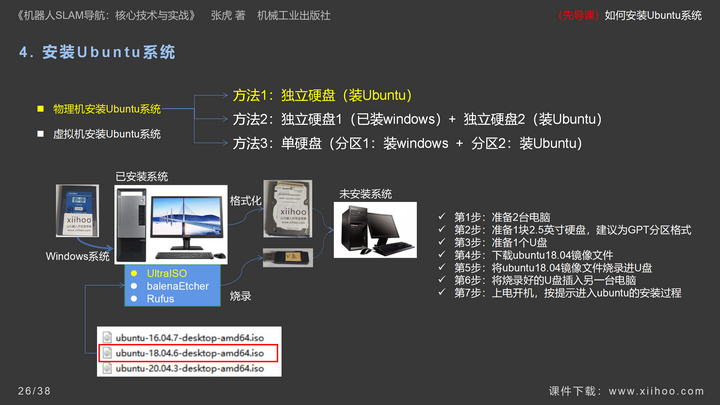
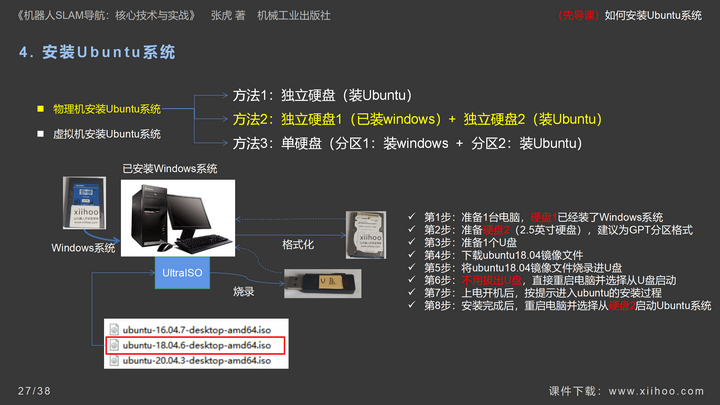
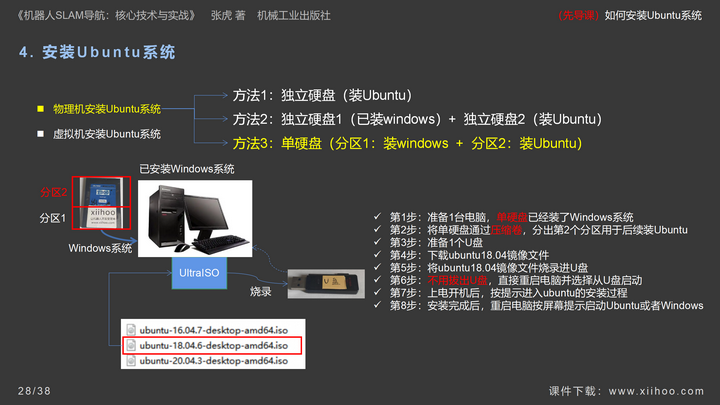
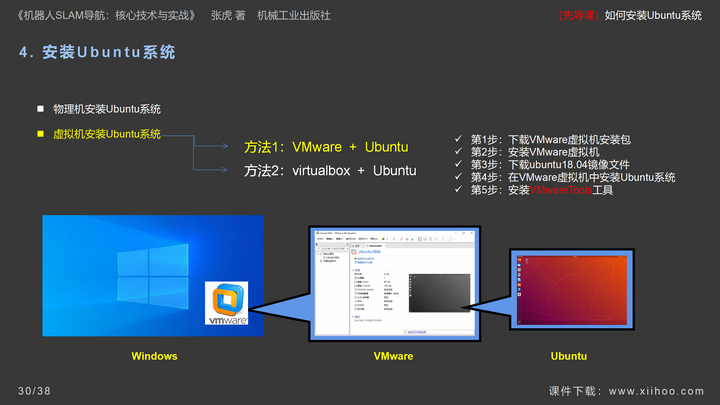
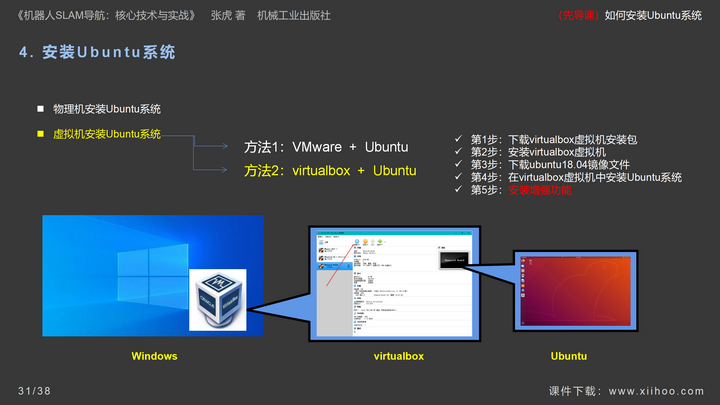
- ubuntu-18.04.6-desktop-amd64.iso
- vmware-workstation-full-16.2.3-19376536.exe
- VirtualBox-6.1.34-150636-Win.exe
- 硬盘格式化工具: DiskGenius
- 启动U盘制作工具: UltraISO
- 文件传输工具: FileZilla_3.59.0_win64-setup.exe
- Github下载:github.com/xiihoo/Books_Robot_SLAM_Navigation
- Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
- PPT课件下载:
- PDF课件下载:
《机器人SLAM导航核心技术与实战》先导课:如何安装Ubuntu系统的更多相关文章
- 《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器
<机器人SLAM导航核心技术与实战>第1季:第4章_机器人传感器 视频讲解 [第1季]4.第4章_机器人传感器-视频讲解 [第1季]4.1.第4章_机器人传感器_惯性测量单元-视频讲解 [ ...
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
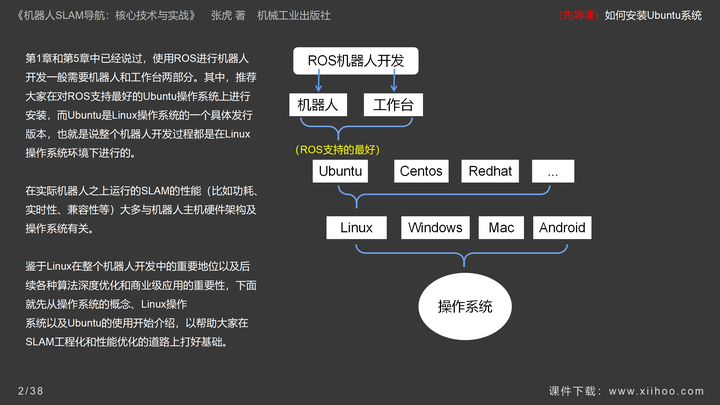
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- 【Linux探索之旅】第一部分第三课:测试并安装Ubuntu
内容简介 1.第一部分第三课:测试并安装Ubuntu 2.第一部分第四课预告:磁盘分区 测试并安装Ubuntu 大家好,经过前两个比较偏理论(是否想起了带着瓜皮帽,手拿折扇的老学究,或者腐儒)的课程, ...
- RViz 实时观测机器人建立导航2D封闭空间地图过程 (SLAM) ----27
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ ROS提供了非常强大的图形化模拟环境 RViz,这个 RViz 能做的事情非常多.今天我们学习一下如何使 ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 除了ROS, 机器人定位导航还有其他方案吗?
利用ROS进行机器人开发,我想大多数企业是想借助ROS实现机器人的导航.定位与路径规划,它的出现大大降低了机器人领域的开发门槛,开发者无需向前人一样走众多弯路,掌握多种知识才能开始实现机器人设计的梦想 ...
- Elasticsearch核心技术与实战-学习笔记
学习资源: Elasticsearch中文社区日报https://elasticsearch.cn/article/ Elasticsearch 官网 https://www.elastic.co/ ...
- Kafka核心技术与实战,分布式的高性能消息引擎服务
Kafka是LinkedIn开发并开源的一套分布式的高性能消息引擎服务,是大数据时代数据管道技术的首选. 如今的Kafka集消息系统.存储系统和流式处理平台于一身,并作为连接着各种业务前台和数据后台的 ...
- Elasticsearch核心技术与实战,性能是真牛
Elasticsearch 是一款非常强大的开源搜索及分析引擎.结合 Kibana.Logstash和Beats,Elasticsearch 还被广泛运用在大数据近实时分析,包括日志分析.指标监控.信 ...
随机推荐
- 微服务实战系列(三)-springcloud、springboot及maven之间关系-copy
1 . 问题描述 随着springboot.springcloud的不断迭代升级,开发效率不断提升,越来越多的开发团队加入到spring的大军中,今天用通俗的语言,介绍下什么是springboot,s ...
- CPU 性能优化总结
在Linux系统中,由于成本的限制,往往会存在资源上的不足,例如 CPU.内存.网络.IO 性能.本文,就对 Linux 进程和 CPU 的原理进行分析,总结出 CPU 性能优化的方法. 1. 分析手 ...
- Docker开发实践:在windows 7中使用Docker for windows访问GUI
1 安装Docker for windows 1.1下载Docker for windows 从下面的网址中下载Docker for windows并安装. https://www.docker.co ...
- 第一届启航杯网络安全大赛部分wp
第一届启航杯 WEB Easy include <?php error_reporting(0); //flag in flag.php $file=$_GET['fil e']; if(iss ...
- oracle19.3打补丁
补丁 36582781 - 数据库发布更新 19.24.0.0.240716 本文档在发布时准确无误.有关数据库版本更新 19.24.0.0.240716 的任何更改和其他信息,请参阅 My Orac ...
- verilog 编写猫狗过河实验
源代码地址:https://github.com/penggeon/catanddog 效果演示见: https://www.bilibili.com/video/BV1n24y147S1 警告: 仅 ...
- 基于生成式AI的访问控制, 迁移传统安全策略到基于LLM的风险分类器
基于规则的风险分类 风险分类是网络安全系统的核心能力之一,它将访问请求和命令映射到其风险级别/类别:高(High).中(Medium).低(Low).目前,即便是在大规模环境中,风险分类器仍主要采用基 ...
- [AI/GPT] 硅基流动(SiliconFlow) : AI大模型时代的基础设施
概述:硅基流动(SilliconFlow) 简介 硅基流动(SiliconFlow) 是一家专注于人工智能(AI)基础设施的公司,致力于通过技术创新降低大模型(如生成式AI和大语言模型)的部署和推理成 ...
- ESP8266+AT指令,使用MQTT协议连接阿里云
AT指令集 AT+CWMODE=1 AT+CWJAP="热点名","热点密码" AT+CIPSNTPCFG=1,8,"ntp1.aliyun.com& ...
- WPF DevExpress GridColumn ComboBox 显示选择内容的 TooTip
实现显示当前选择的ComboBox中项的ToolTip信息: 1. 设置 GridColumn 的 CellTemplate 为 ComboBoxEdit , 然后自定义他的 ItemContaine ...